Error estimation and compensation in 4R and P3R closed-chain mechanisms due to joint clearance: a comparative study
Ankur Jaiswal, Darren Alton Dsouza, H. P. Jawale, Abhishek Jha, Anil Kumar, Munendra Singh

TL;DR
This study compares how joint clearance affects the accuracy of two types of planar mechanisms, finding that revolute joints perform better in minimizing errors.
Contribution
The paper introduces a novel error compensation framework and reveals that 4R mechanisms are more robust to joint clearance than P3R mechanisms.
Findings
Joint clearance causes non-uniform positional errors in mechanisms.
4R mechanisms show greater robustness and lower sensitivity to joint clearance compared to P3R mechanisms.
Revolute joint-based actuation is preferable for minimizing positional inaccuracy in robotic manipulators.
Abstract
Four-bar linkages form the fundamental configuration of many planar mechanisms, and joint clearance is one of the primary factors that introduce deviations from their intended output. This paper presents a performance assessment of planar mechanisms with prismatic (P) and revolute (R) joints specifically 4R and P3R configurations under the influence of joint clearance. A detailed methodology for mechanical error analysis and compensation is employed. Both mechanisms are evaluated for identical trajectory generation tasks to ensure a fair comparative analysis. It is found that joint clearance leads to non-uniform positional errors across the mechanism’s working range, contrary to common assumptions of uniform error. Notably, the 4R mechanism exhibits greater robustness and lower sensitivity to joint clearance-induced positional errors compared to the P3R configuration. These findings…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
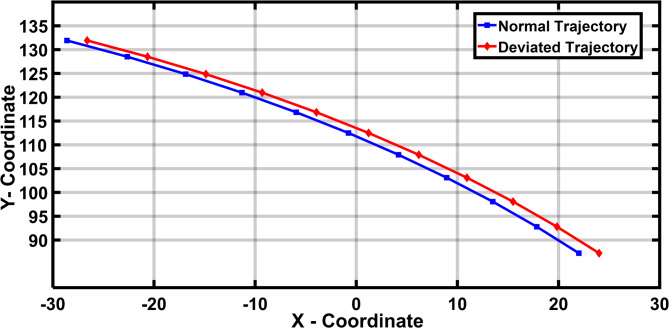 Figure 10
Figure 10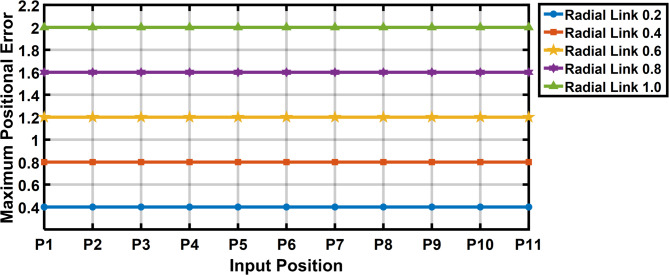 Figure 11
Figure 11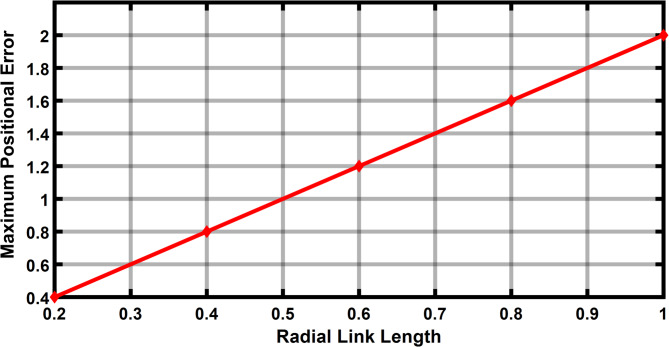 Figure 12
Figure 12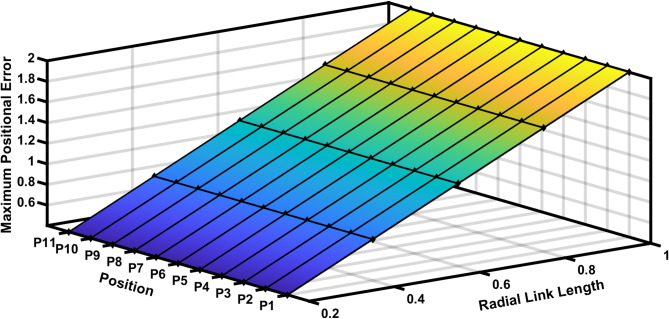 Figure 13
Figure 13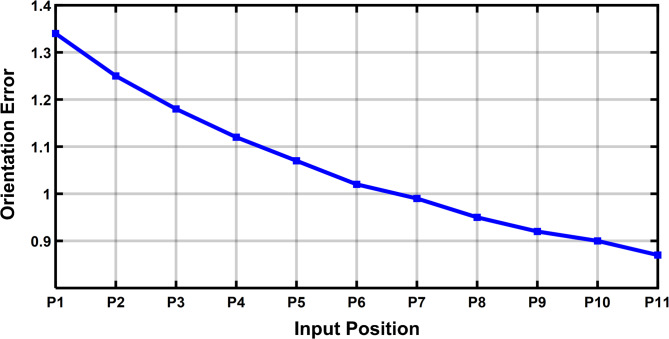 Figure 14
Figure 14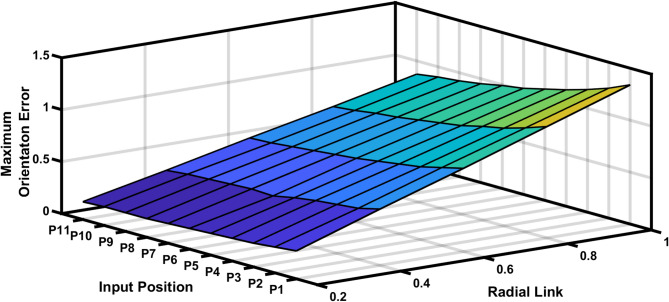 Figure 15
Figure 15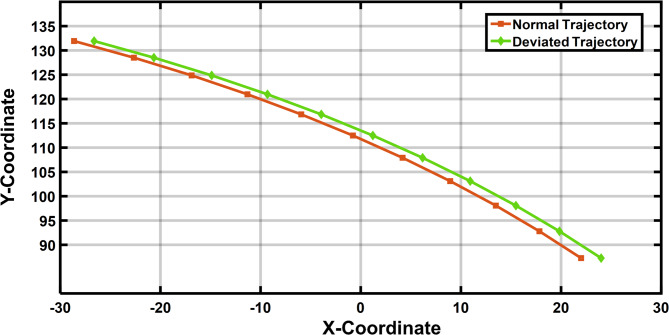 Figure 16
Figure 16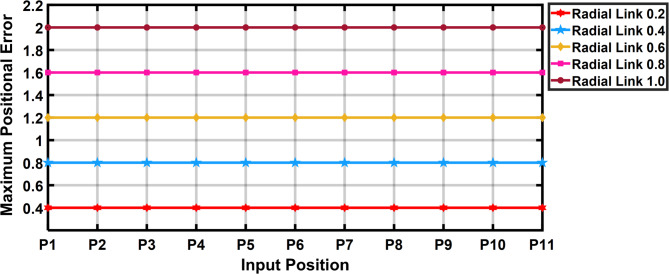 Figure 17
Figure 17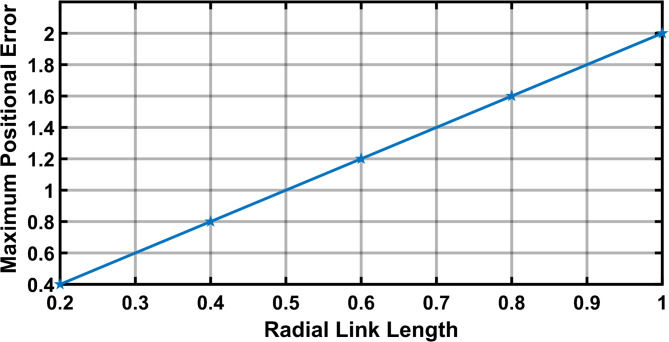 Figure 18
Figure 18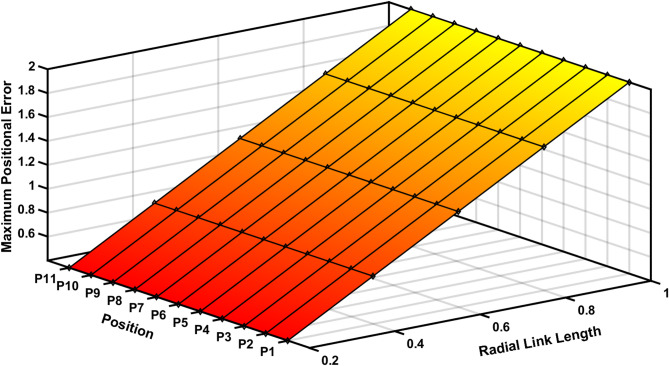 Figure 19
Figure 19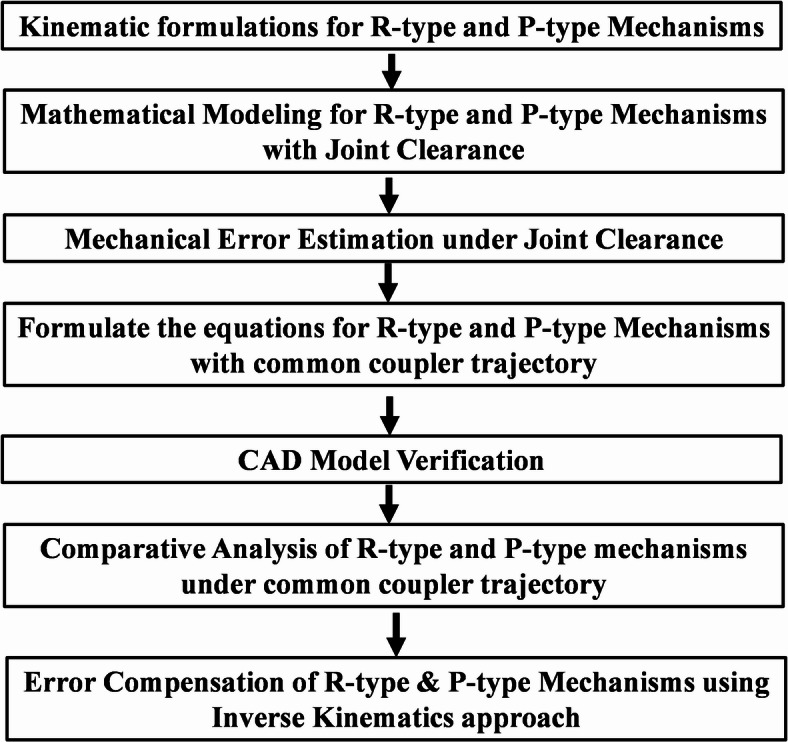 Figure 1
Figure 1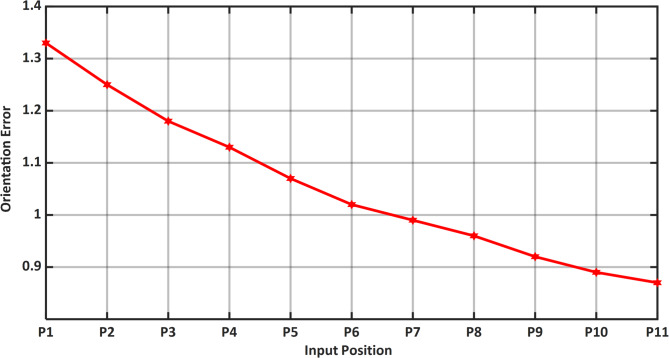 Figure 20
Figure 20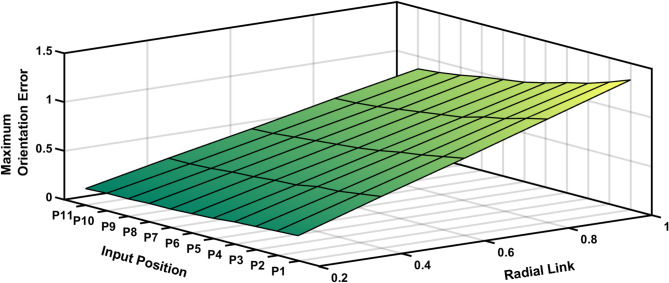 Figure 21
Figure 21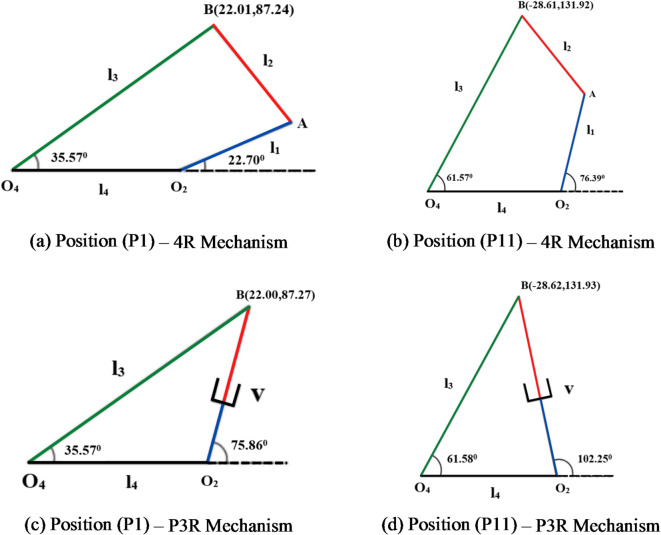 Figure 22
Figure 22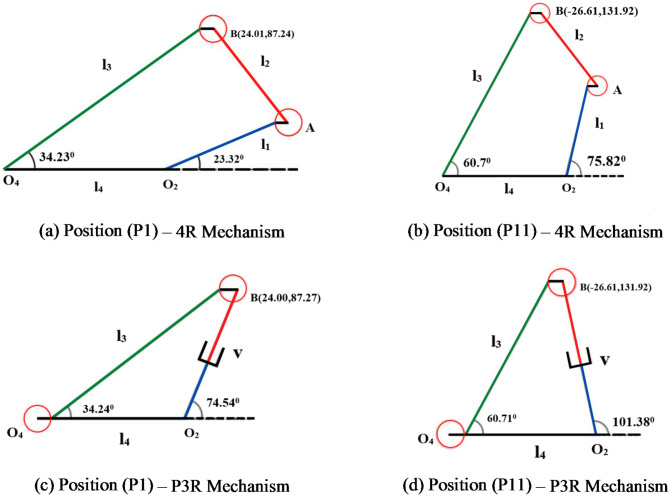 Figure 23
Figure 23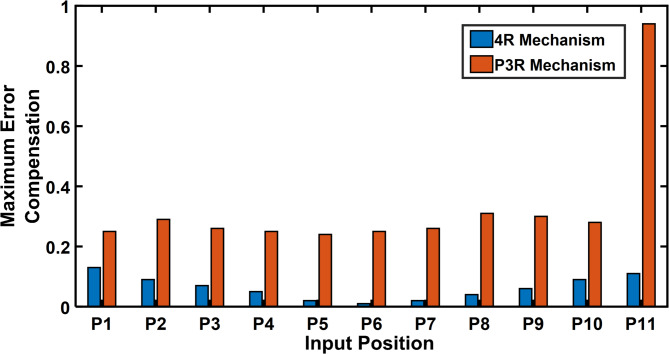 Figure 24
Figure 24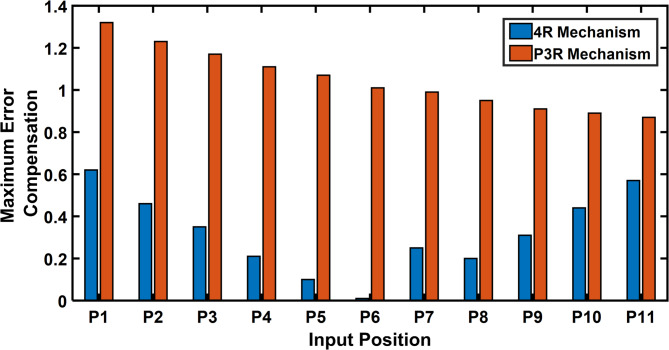 Figure 25
Figure 25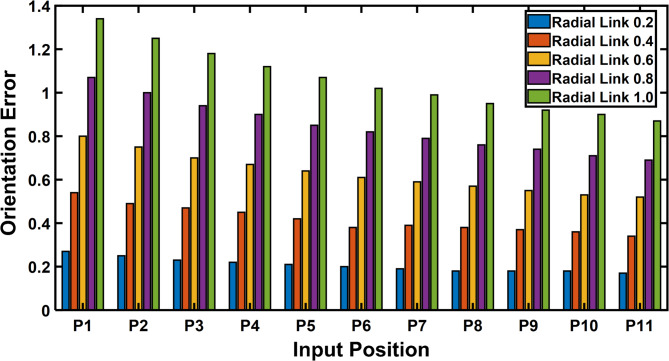 Figure 26
Figure 26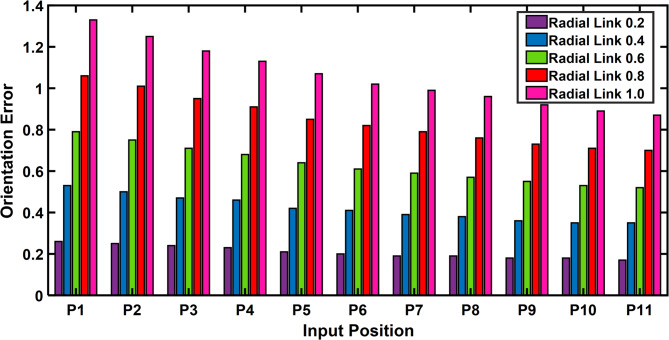 Figure 27
Figure 27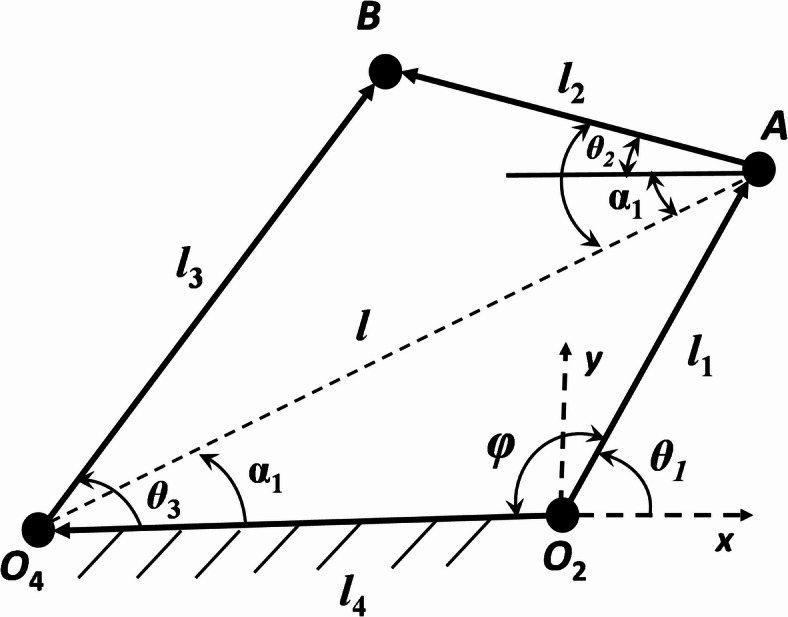 Figure 2
Figure 2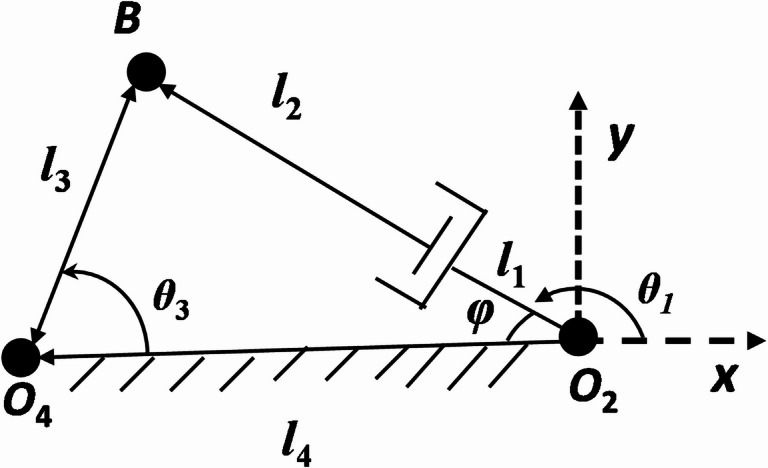 Figure 3
Figure 3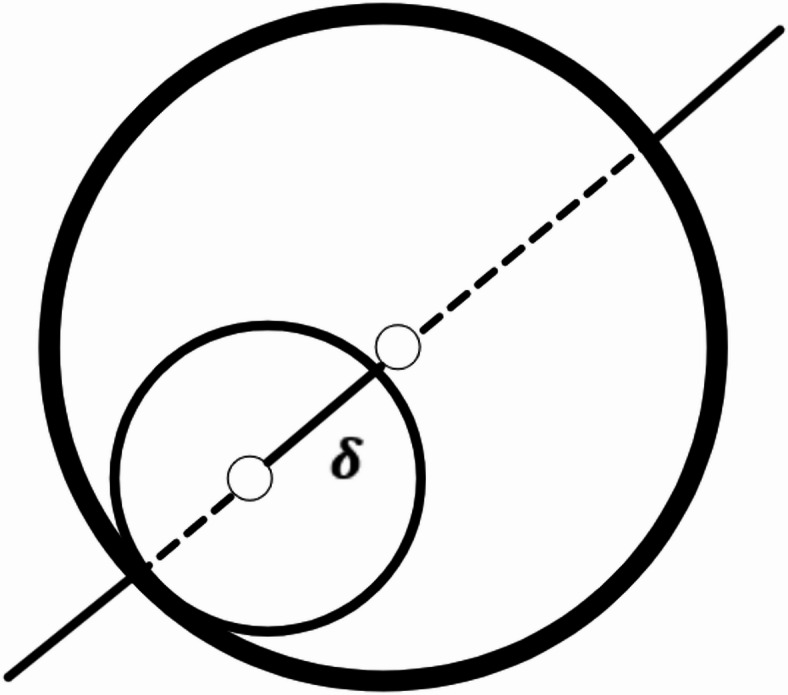 Figure 4
Figure 4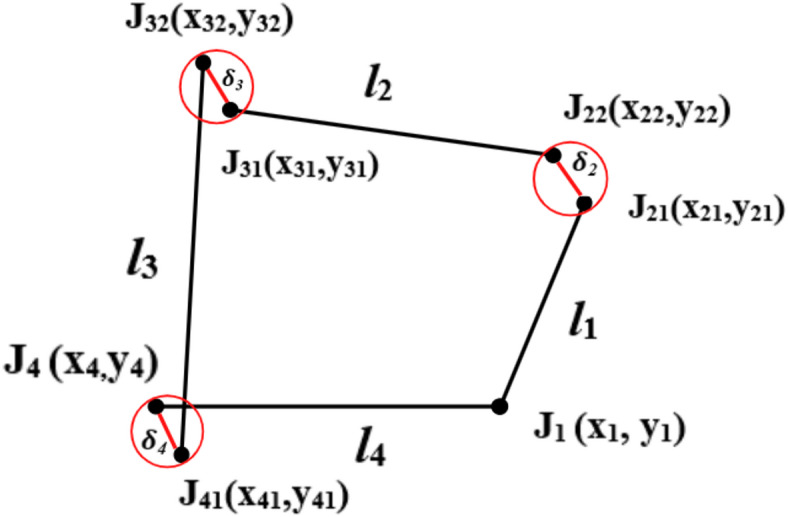 Figure 5
Figure 5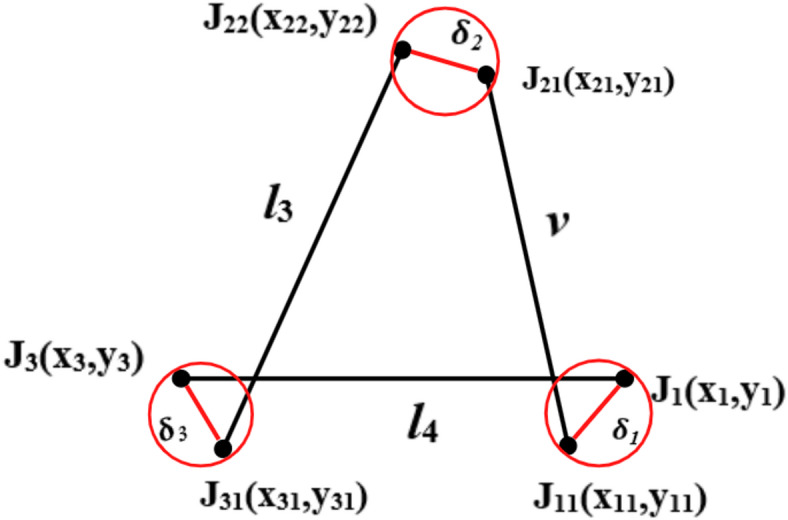 Figure 6
Figure 6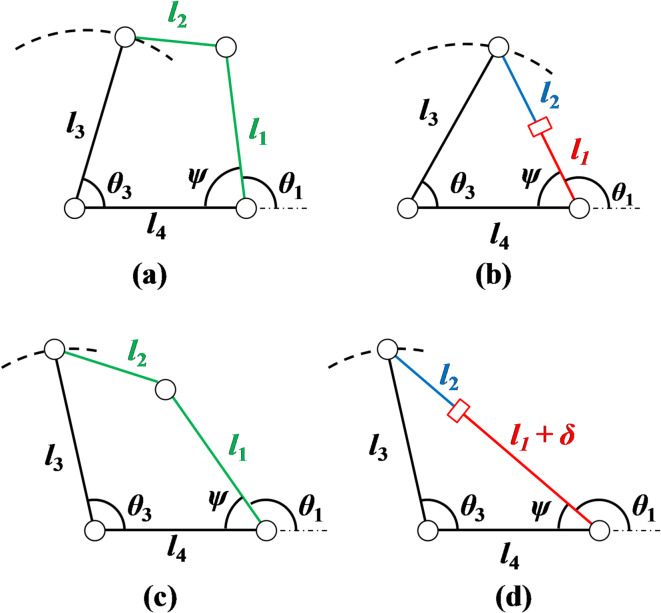 Figure 7
Figure 7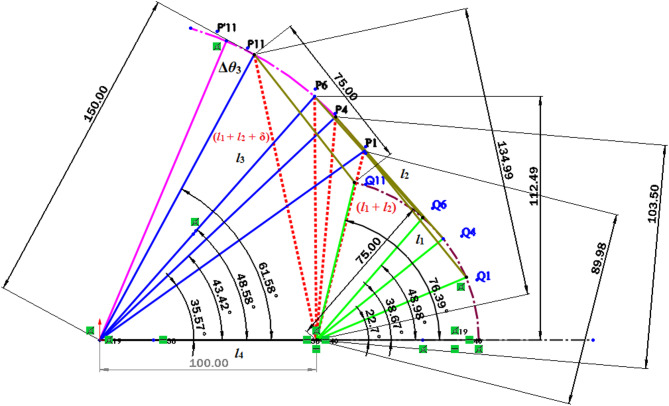 Figure 8
Figure 8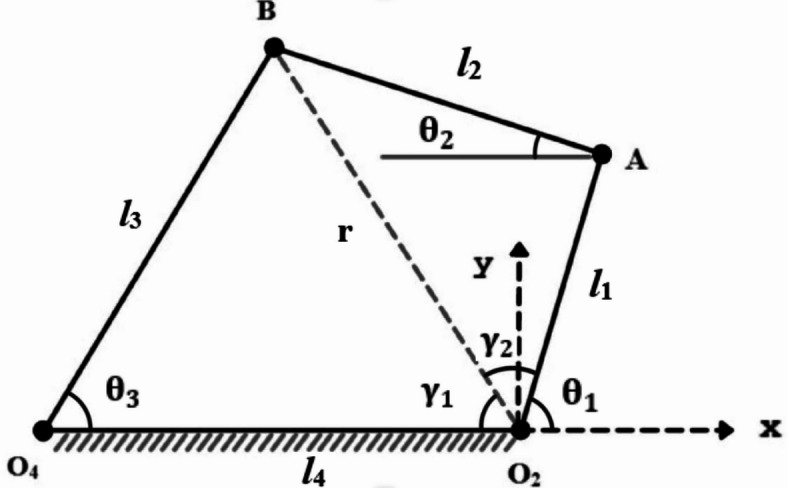 Figure 9
Figure 9- —Manipal Academy of Higher Education, Manipal
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Mechanisms and Dynamics · Dynamics and Control of Mechanical Systems · Robot Manipulation and Learning
Introduction
Planar closed-chain mechanisms are one of the most significant fields of robotics and automation study today. To position tools or things where they are needed, robotic manipulators are frequently utilized. Several applications employ closed-chain mechanisms with spatial and planar configurations as manipulators. A common example of such a mechanism is the four-bar linkage, which is employed in many machines and processes to produce the desired path, function, and motion. Applications for four bar mechanisms and its inversion include machine linkages, automobiles, biomedical equipment, and many more. To explore a variety of complex processes, a straightforward structure like a four-link chain is employed. The type of input condition of the mechanism has an impact on the performance metrics of the mechanism, such as positioning accuracy, structural and mechanical defects^1,2^. Such manipulators might be used for quick automations since they are more affordable than traditional open chain robots. The main stages of such applications include simple planar mechanisms and various inversions developing same coupler trajectory. A coupler point may be used as an end effector and the closed chain mechanism can be created as a manipulator by using the perfect drive. It is inevitable that joints in mechanisms will have clearance. It takes a very little, adequate clearance for a mechanism to move smoothly. On the other side, joint clearance has negative consequences that are seen. A common concept for mechanism joint clearance among researchers is an extra link with a length equal to half the joint clearance^3–8^. These mechanisms employ the R-type and P-type actuators to accomplish the required task. The selection of an actuator is determined by the functional requirements of kinematic and dynamic parameters for the mechanisms. As a result, when choosing between linear and rotating actuation, a comparative performance analysis is essential. The essential performance feature for such research is the positional inaccuracy caused by structural and mechanical elements. To discover and improve a mechanism’s accuracy and precision, positional error analysis is essential. This facilitates the reduction of the structural features of the mechanism and the investigation of the input–output relationship. Additionally, this research helps to comprehend and eliminate manufacturing flaws and defects^3,9–13^.
Joint clearances are a result of the fact that minute manufacturing flaws can introduce angular or linear deviations into a mechanism as it operates, leading to minor errors. Think about the P3R mechanism’s revolute joint. One of the most common forms of joints found in planar mechanisms i.e. pin joint or hinged joint, which is used in this junction^5^. Since these errors are unpredictable, it is very difficult and expensive to foresee and rectify them. Considering the slot as the central point, we can imagine an extra link that creates a circle with a slot as the center. This connection serves as the clearance or joint clearance^14^. To assess its effect on dynamic properties, positional deviation, vibrations and noise, accelerations, and surface wear, mechanism joint clearance was represented as an additional link with a length equal to half of the joint clearance. The position and direction of the clearance vector are affected by a few dynamic factors, including the speed of operation, inertia forces, and load on mechanisms. Joint clearance causes a positional change that is greater than the combined effect of all the other factors. Since the positional fluctuation it causes is unanticipated and arbitrary, it is vital to investigate its effects^3,7^.
Erkaya et al.^15^ examined the effects of clearance and link flexibility on stresses. Sharfi and Smith investigated the dimension deviation and play in the joints of the complex mechanisms^16^. In multi-loop processes, revolute and prismatic pairs’ joint clearances and the related uncertainty were modelled and analyzed, according to K. L. Ting et al.^17^. Flores^18^ developed a general paradigm for evaluating the effects of manufacturing and assembly tolerance-related kinematic position errors in open and closed chain planar mechanisms. To determine the influence of joint clearance on pose deviation in trajectory, Ting et al. presented the N-bar rotatability principles and advanced optimization techniques^19^. Numerous methods, including the stochastic approach^20,21^, probabilistic model^22^, loop closure technique^23^, and genetic algorithm^24^, are employed in the literature to address issues with positional inaccuracy, drive performance and transmission angle of serial and closed mechanisms. The probability approach is used in serial, planar, and spatial robotics to evaluate the influence of link tolerance and joint clearance on^17,23–27^. Zhang and Xianmin^28^ examined the uncertainty under the clearance on the joints of planar parallel mechanisms. Chen et al.^29^ presented a comparison of the two mechanisms based on position deviation. Jawale and Thorat^30^ investigated the 4R, 2-serial, and P3R processes, as well as the consequences of clearances and backlash. To assess motion sensitivity, mechanical parameters of coupler curves is carried out, as investigated by Erkaya et al.^31^. Due to the joint clearance, Erkaya et al.^32^ examined the kinematic and dynamic performance of the single-DOF planar mechanisms. Tsai and Lai evaluated the multi-link system’s kinematic position and accuracy using the wrench screw method. Joint clearance findings are contrasted with those of the ideal mechanism^33^. Jawale and Thorat^34^ examined the position accuracy of serial and closed chain manipulators, compared the angular errors with joint clearances. Li et al. proposed the geometric technique, an optimization strategy is employed to estimate the orientation errors and verified by Monte Carlo simulations^35^. Tsai and Lai investigated the effects of joint clearances on transmission quality and mechanism faults^36^. Wu and Rao adopted the interval approach to represent tolerances and clearances and to analyse fuzzy errors in mechanisms. The interval number and conventional method are contrasted^37^. By considering the unpredictability of connection lengths and using saddle point approximation to determine the error inside a sphere with a radius equal to the expected error, Zhang and Han proposed a reliable approach^38^. Jaiswal and Jawale et al. investigated mechanical error in four bar revolute joint mechanisms under the impact of line tolerance^39,40^.
This study investigates two mechanisms: the 4R mechanism, consisting solely of revolute joints, and the P3R mechanism, which integrates prismatic and revolute joints. These serve as representative examples of R-type and P-type actuated systems. A comparative analysis is carried out to understand how joint clearance influences each type. The work examines the maximum positional and orientation errors in both mechanisms under varying clearance conditions. For input positions with common trajectory conditions, the study evaluates and contrasts the two actuation modes to identify the more suitable option. The paper is organized into the following sections: methodology, mathematical modeling of closed-chain mechanisms with joint clearance, error compensation through inverse kinematics, results and discussion, and finally, conclusions.
Methodology
The flow of the proposed work R-type and P-type mechanisms is examined for positional error and compensation with the effect of joint clearance under identical operating conditions, Fig. 1. The formulation of kinematic equations of R-type and P-type mechanisms is conducted mathematically, estimating common coupler position of given input positions (linear and rotatory) to generate the trajectory for both mechanisms. To estimate and compensate for positional and orientation errors in R-type (4R) and P-type (P3R) closed-chain mechanisms under the influence of joint clearance. The methodology, as illustrated in Fig. 1, consists of several key stages outlined below:Fig. 1. Flow chart.
The proposed mathematical model has been verified using the CAD model approach. Furthermore, the effect of joint clearance is incorporated into the kinematic model to examine the maximum positional error obtained and verification. The position and orientation error of the mechanism is examined and evaluated the error compensation using inverse kinematic approach.
Mechanism selection and kinematic modelling
Two types of closed-chain planar mechanisms namely the 4R (revolute) mechanism and the P3R (prismatic-revolute) mechanism were selected for analysis due to their common usage in robotic manipulators and parallel mechanisms.
- Kinematic equations for both mechanisms were derived based on loop-closure equations using standard vector and transformation matrix techniques.
- The forward kinematics were used to compute the desired coupler position (trajectory) corresponding to 11 pre-defined input configurations for each mechanism (rotational inputs for 4R and linear inputs for P3R).
Introduction of joint clearance
To simulate real-world uncertainties, joint clearance was introduced into the kinematic model:
- Each revolute or prismatic joint was assumed to have a maximum radial clearance, represented as an offset in joint center, modelled as a radial link of up to 1 mm.
- These perturbations were incorporated into the mathematical kinematic equations to estimate the deviated (actual) coupler positions under maximum clearance conditions.
Error estimation
The positional and orientation errors between the desired and deviated (clearance-affected) trajectories were computed as follows:
- Positional error was quantified as the Euclidean distance between the normal and deviated coupler positions.
- Orientation error was calculated as the absolute angular difference between the desired and deviated orientation angles of the coupler link.
This analysis was performed for all 11 input positions for both mechanisms.
CAD model verification
To validate the mathematical models:
- A detailed CAD simulation was performed. Both desired and clearance-affected trajectories were replicated in the CAD environment.
- The resulting coupler positions and orientation angles from the CAD model were compared to the values obtained from the mathematical model to ensure consistency and accuracy.
Error compensation using inverse kinematics
An inverse kinematics-based compensation strategy was implemented to correct for the observed positional errors due to joint clearance:
- The required adjustment in the actuator input (rotational for 4R, linear for P3R) was calculated to bring the mechanism back to its original desired pose despite the presence of joint clearance.
- The compensation values were computed for each input position under various clearance levels.
- Compensation trends were compared between both mechanisms to evaluate their robustness and sensitivity to joint clearance.
Comparative analysis
A comparative study was conducted between the 4R and P3R mechanisms by evaluating:
- Maximum positional and orientation errors across the input range.
- Required input on actuators or drive to compensations for different clearance levels.
- Overall robustness of the mechanism to joint clearances in terms of both pose deviation and compensation effort.
Kinematic formulation for R-type and P-type mechanisms
R-type mechanism
In Fig. 2, represents a 4R (4-Revolute) mechanism in a task space system. Taking design parameters l1, l2, l3, l4, θ1, as inputs and θ3 as the output angle of displacement equation is written as:
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\varphi = 180 - \theta_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$cos\varphi = \frac{{l_{4}^{2} + l_{1}^{2} - l^{2} }}{{2l_{4} l_{1} }}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$l = \sqrt {l_{4}^{2} + l_{1}^{2} - 2l_{4} l_{1} cos\varphi }$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\alpha_{1} = cos^{ - 1} \left( {\frac{{l_{4}^{2} + l^{2} - l_{1}^{2} }}{{2l_{4} l}}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\beta_{1} = cos^{ - 1} \left( {\frac{{l_{2}^{2} + l^{2} - l_{3}^{2} }}{{2l_{2} l}}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{2} = \beta_{1} - \alpha_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$B_{x} = l_{1} cos\theta_{1} - l_{2} cos\theta_{2} = - 100 + 150cos\theta_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$B_{y} = l_{1} sin\theta_{1} + l_{2} sin\theta_{2} = 150sin\theta_{3}$$\end{document}Fig. 2. Kinematic sketch of R-type (4R) mechanism.
P-type mechanism
In Fig. 3, the planar P3R (1-prismatic and 3-Revolute) mechanism with a linear actuation is demonstrated. The kinematic equation is to determine the coupler position with the variation input displacement through the linear drive motor or actuator.
Fig. 3. Kinematic sketch of P-type (P3R) mechanism.
Let the instantaneous actuator length be v given as
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$v = \left( {l_{1} + l_{2} } \right) + \delta$$\end{document}where \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$${\updelta }$$\end{document} = displacement of the actuator.
Using cosine theorem,
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\varphi = cos^{ - 1} \left( {\frac{{v^{2} + l_{4}^{2} - l_{3}^{2} }}{{2l_{4} v}}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{3} = cos^{ - 1} \left( {\frac{{l_{3}^{2} + l_{4}^{2} - v^{2} }}{{2l_{3} l_{4} }}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{1} = 180 - \varphi$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$B_{x} = - vcos\varphi = - 100 + 150cos\theta_{3}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$B_{y} = vsin\varphi = 150sin\theta_{3}$$\end{document}Mathematical modelling under joint clearance
Joint clearance
Geometrically, joint clearance (δ) is the difference of radius of pin and the hole as in Fig. 4. A pin joint (or revolute joint) ideally allows pure rotation between two links with no relative translation. Due to manufacturing tolerances or wear, a clearance (gap) exists between the pin and the hole in Fig. 4. In this situation, clearance is defined as a small link (radius of the pin) between nominal links of the mechanism. Each joint with clearance will provide the extra single degree of freedom (DOF) to the mechanism.
Fig. 4. Radial clearance link at joint.
Clearance formulation for R-type mechanism
As shown in Fig. 5 coupler point is shifted to J_32_ from J_31_ under effect of joint clearance. Each joint is altered due to clearance link. Position Let λ1, λ2, λ3, and λ4 are angle made by clearance link about J_1_, J_21_, J_31_ and J_4_ with fixed link axis and δ1, δ2, δ3, and δ4 are the clearance link lengths, the deviated position of joint J_4_ is J_41_(x41, y41) such that,
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{21} = l_{1} cos\theta_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{21} = l_{1} sin\theta_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{22} = x_{21} + \delta_{2} cos\lambda_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{22} = y_{21} + \delta_{2} sin\lambda_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{31} = x_{22} - l_{2} cos\theta_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{31} = y_{22} + l_{2} sin\theta_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{32} = x_{31} + \delta_{3} cos\lambda_{3}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{32} = y_{31} + \delta_{3} sin\lambda_{3}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{41} = x_{4} + \delta_{4} cos\lambda_{4}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{41} = y_{4} + \delta_{4} sin\lambda_{4}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$Positional Error = \sqrt {\left( {B_{x} - B_{xnew} } \right)^{2} + \left( {B_{y} - B_{ynew} } \right)^{2} }$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$Orientation Error = \theta_{{3\left( {deviated} \right)}} - \theta_{{3 \left( {desired} \right)}}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{{3\left( {new} \right)}} = sin^{ - 1} \left( {\frac{{y_{32} }}{{l_{3} }}} \right) or cos^{ - 1} \left( {\frac{{x_{32} }}{{l_{3} }}} \right)$$\end{document}Fig. 5R-type mechanism with joint clearance.
The Eqs. (25), (26) and (27) are used to estimate the pose error in the 4R mechanism by the influence of clearance in joint.
Clearance formulation for P-type mechanism
The coupler position is deviated to J_22_ from J_21_ due to joint clearance as shown in Fig. 6. Each joint is affected by the clearance. Position Let λ_1_, λ_2_ and λ_3_ are angle made by clearance link about J_1_, J_21_ and J_31_ with fixed link axis and δ_1_, δ_2_, and δ_3_ are the clearance at joint, the deviated position of joint J_3_ is J_31_(x_31_, y_31_) such that.
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{11} = x_{1} + \delta_{1} cos\lambda_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{11} = y_{1} + \delta_{1} sin\lambda_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{21} = x_{11} + vcos\theta_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{21} = y_{11} + vsin\theta_{1}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{22} = x_{21} + \delta_{2} cos\lambda_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{22} = y_{21} + \delta_{2} sin\lambda_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x_{31} = x_{3} + \delta_{3} cos\lambda_{3}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$y_{31} = y_{3} + \delta_{3} sin\lambda_{3}$$\end{document}Fig. 6P-type mechanism with joint clearance.
Common coupler trajectory between R-type and P-type mechanisms
The position error in R-type and P-type mechanisms is caused by clearances on joint deviations and actuators input (rotatory and linear)^38^. Both mechanisms (R-type and P-type) are generated to the same coupler trajectory and the necessary inputs of actuators are estimated.
The Fig. 7 (a-b) illustrates the kinematic representation of R-type and P-type mechanisms. Link 1 shows the rotary and linear inputs of R-type and P-type mechanisms. The common coupler trajectory generates for both mechanisms by Link 3 i.e. both mechanisms are subjected to common coupler trajectory is shown in Fig. 7 (c-d). The initial and final position of P-type mechanism with zero and maximum input displacement are shown in Fig. 7(b-d). The equivalent R-type mechanism for output identical or common coupler trajectory to the P-type mechanism.
Fig. 7R-type (a, c) and P-type (b, d) mechanisms under common coupler trajectory^38^.
Jaiswal and Jawale^38^ define the mathematical model for common coupler trajectory in both mechanisms (Table 1). The equivalent operating conditions obtained for positions P1 and P11 by mathematically is validated using CAD model approach as seen in Fig. 8.
Table 1. Common coupler trajectory for P3R and 4R mechanisms^38^.Linear displacementin P-type mechanism (ν)Common coupler positionAngular displacement in R-type mechanism (θ1 deg.)90P122.794.5P228.1699P333.46103.5P438.67108P543.83112.5P648.98117P754.17121.5P859.43126P964.83130.5P1070.45135P1176.39 Fig. 8CAD model for common coupler trajectory generation in P3R and 4R mechanisms.
The equivalent range of inputs for both P-type and R-type mechanisms is established and presented in Table 1. Moreover, the mathematical approach used to obtain the identical operating conditions [52] for positions P1 and P11 is cross validated using a CAD modelling approach, as depicted in Fig. 8. This investigation provides crucial insights into the relationship between linear and angular displacements in these mechanisms, with potential implications in the field of selection of actuator in the manipulator design.
Mathematical formulation of inverse kinematics for error compensation
R-type mechanism
The positional error obtained due to the difference in desired position and the position obtained due to joint clearance generated by the mechanism is compensated by inverse kinematics approach (Fig. 9). The equations are as listed below:
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{3} = sin^{ - 1} \left( {\frac{{y_{32} }}{{l_{3} }}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\gamma_{1} = cos^{ - 1} \left( {\frac{{r^{2} + l_{4}^{2} - l_{3}^{2} }}{{2rl_{4} }}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\gamma_{2} = cos^{ - 1} \left( {\frac{{l_{1}^{2} + r^{2} - l_{2}^{2} }}{{2rl_{1} }}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\varphi = \gamma_{1} + \gamma_{2}$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{1} = 180 - \varphi$$\end{document}Fig. 9R-type mechanism using inverse kinematics approach.
P-type mechanism
Inverse kinematics is performed on the P3R mechanism to compensate the error obtained due to joint clearances (Fig. 3). The equations derived are as follows
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$x = - vcos\varphi$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\varphi = cos^{ - 1} \left( {\frac{ - x}{v}} \right)$$\end{document} \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{1} = 180 - \varphi$$\end{document}Dimensional parameters
The design parameters for R-type and P-type mechanisms with common trajectory conditions are given as^38^. The common trajectory generation is considered for giving the required comparison parameters for two distinct manipulators, without which performance evaluation is not possible. Initially, R type manipulators with link lengths and the trajectory generated by this configuration are obtained, followed by inverse analysis for a P type manipulator and actuator displacement is estimated. Additionally, considering all links as rigid, the mechanism can be analyzed without accounting for elastic deformations.
R-type mechanism
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$l_{{4}} = { 1}00;l_{{3}} = { 1}.{5 } \times l_{{4}} = { 15}0; l_{{1}} = l_{{2}} = { 75}$$\end{document}P-type mechanism
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$l_{{4}} = { 1}00;l_{{3}} = { 1}.{5 } \times l_{{4}} =_{{}} {15}0;l_{{1}} = l_{{{2} }} = \delta = { 45};$$\end{document}Results and discussion
The positional and orientation error estimation of P-type and R-type mechanisms is carried out for an uncertain situation due to clearance. The appropriate range of clearances, which could be obtained from the assembly of the links with joints, are an analysis. The estimated deviations are interpreted as a pose error; however, it is possible to determine the normalized clearances effect in general.
Error estimation in R-type mechanism
Figure 10 presents the normal and deviated trajectory of the coupler in R-type mechanism with joint clearance in the task space system. The maximum deviated coupler position for 11 rotary actuator inputs is evaluated with the maximum clearance level [52]. There is a deviation in the trajectory generated by the 4R mechanism in Table 2.
Fig. 10. Coupler position in 4R mechanism.
Table 2. Coordinates of the desired and deviated trajectory for 4R mechanism.4R mechanismS NoPositionInput link position(Degree)Desired (Normal) coupler positionDeviated coupler positionXCo-ordinateYCo-ordinateXCo-ordinateYCo-ordinate1P122.722.01587.24824.01587.2482P228.1617.85192.79619.85192.7963P333.4613.598.07115.598.0714P438.678.944103.10810.944103.1085P543.834.186107.9136.186107.9136P648.98-0.773112.491.227112.497P754.17-5.942116.846-3.942116.8468P859.43-11.303120.967-9.303120.9679P964.83-16.871124.858-14.871124.85810P1070.45-22.647128.517-20.647128.51711P1176.39-28.615131.925-26.615131.925
The Fig. 11 shows the 11 input link positions versus its maximum positional error with radial link length (joint eccentricity) during joint clearance. As observed through the maximum positional error for a given radial link (joint clearance) for a desired position is twice the radial link length. It is also observed that the Fig. 11 demonstrates radial link (joint clearance) versus maximum positional error relations is a constant. Figure 12 depicted the increase in estimated error with the increase in clearance level. The maximum error obtained is of 2 mm i.e. when the radial link is of 1 mm clearance level.
Fig. 11. Input link positions vs maximum positional error in R-type mechanism. Fig. 12. Radial link length vs maximum positional error in R-type mechanism.
Figure 13 represents the 3D surface plot of radial link vs coupler position vs estimated positional error, it signifies the increase in positional error with increase in level of clearances simultaneously indicating a constant maximum error for the given range radial link length. The Fig. 14 represents the maximum orientation error vs 11 input positions of the actuator for maximum radial link joint clearance of the 4R mechanism. The orientation error between the desired and deviated angle and the error is estimated and observed that the error is almost identical to 1. The Fig. 14 depicts the 2D plot of input position vs orientation error, it shows that the orientation error decreases as the input angle increased to be larger for input position. Figure 15 represents the surface plot of input position vs maximum orientation error for each given radial link length. As the radial link length increases, the optimal orientation error for each position increases simultaneously (Table 3).
Fig. 13. Radial link vs coupler position vs Maximum positional Error in R-type mechanism. Fig. 14. Input position vs Orientation Error (Radial Link 1). Fig. 15. Input Position vs Radial Link vs Maximum Orientation Error.
Table 3. Maximum orientation error for radial link 1 mm.Maximum orientation error 4RPosition \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{3}$$\end{document}
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{{3\left( {deviated} \right)}}$$\end{document} Orientation errorP135.5734.231.34P238.2136.961.25P340.8239.641.18P443.4242.31.12P54644.931.07P648.5847.561.02P751.1650.170.99P853.7452.790.95P956.3455.420.92P1058.9558.050.9P1161.5760.70.87
Error estimation on P-type mechanism
Figure 16 depicts the normal and deviated trajectory of the coupler position in the P-type mechanism with joint clearance in the task space system. The maximum deviated coupler position for 11 linear actuator position is evaluated with the maximum clearance level [52]. There is a deviation in the trajectory generated by the P3R mechanism in Table 4.
Fig. 16. Coupler position in P3R mechanism. Table 4. Deviated Trajectory for P3R Mechanism.P3R mechanismS. NoPositionInput link positionDesired coupler positionDeviated coupler positionX Co-ordinateY Co-ordinateX Co-ordinateY Co-ordinate1P1902287.272487.272P294.517.84992.79919.84992.7993P39913.49598.07615.49598.0764P4103.58.939103.11310.939103.1135P51084.18107.9196.18107.9196P6112.5− 0.781112.4971.219112.4977P7117− 5.945116.849− 3.945116.8498P8121.5− 11.311120.972− 9.311120.9729P9126− 16.88124.864− 14.88124.86410P10130.5− 22.651128.519− 20.651128.51911P11135− 28.625131.93− 26.625131.93
The Fig. 17 shows the input positions versus the maximum positional error generated for a radial link (joint eccentricity). The maximum positional inaccuracy for a given radial link length for a certain point is twice the radial link length, as indicated in Fig. 17. The maximum positional error is shown to be a constant for a considered radial link length in Fig. 17. However, the radial link was 1 mm in length, the highest positional error obtained is 2 mm, indicating the increase in estimated error with increase in joint clearances (Fig. 18). Figure 19 is a 3D surface plot of radial link vs. input position vs. maximum positional error, exhibiting an increase in maximum positional error with increasing radial link length while also indicating a constant maximum error for a given radial link length.Fig. 17. Input position vs Maximum positional error P3R mechanism.Fig. 18. Radial link vs Maximum positional error P3R mechanism.Fig. 19. Input position vs radial link vs maximum positional error.
The maximum orientation error recorded at the output link for each of the 11 input points is shown in Table 5. The desired and deviated coupler position is determined along with the error, and it is observed that the error is nearly equal to one, i.e. the maximum positional error is radial link length. The Fig. 20 depicts the 2D plot of input position versus orientation error, it shows that the orientation error decreases as the input angle decreased to be larger for input position. Figure 21 represents the surface plot of input position versus the maximum orientation error for each given radial link length. As the radial link length increases, the optimal orientation error for each position increases simultaneously.
Table 5. Maximum orientation error for radial link 1 mm.Maximum orientation error P3RPosition \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{3}$$\end{document}
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{{3\left( {new} \right)}}$$\end{document} Orientation errorP135.5734.241.33P238.2236.971.25P340.8339.651.18P443.4342.31.13P54644.931.07P648.5847.561.02P751.1650.170.99P853.7552.790.96P956.3455.420.92P1058.9558.060.89P1161.5860.710.87
Fig. 20. Input position vs Orientation error P3R mechanism. Fig. 21P3R Mechanism Orientation Error Plot.
CAD model verification
The Fig. 22a, b and c, d shows the desired coupler position and orientation angle of the output link using the CAD model of the R-type and P-type mechanisms. The position and orientation of both mechanisms are examined through mathematical model results. The Table 6 represents the position of coupler and orientation angles for P1 and P11 using mathematical and CAD model approach.
Fig. 22(a-d) Verification of position and orientation using CAD model approach.
Table 6. Comparison of the desired position and orientation between the mathematical model and CAD model.Coupler position4R mechanismP3R mechanismMathematical ModelCAD ModelMathematical ModelCAD Model B x
B y θ_3_º B x
B y θ_3_º B x
B y θ_3_º B x
B y θ_3_ºP122.01587.24835.5722.0187.2435.5722.0087.2735.5722.0087.2735.57P11-28.615131.92561.57-28.61131.9261.57-28.625131.9361.58-28.62131.9361.58
The Fig. 23a, b and c, d shows the results of deviated position of coupler and orientation angle of the output link for the 4R and P3R mechanisms using the CAD model. The Table 7 represents the deviated coordinates of the coupler and orientation angles of both (4R and P3R) mechanisms through the formulated mathematical approach and CAD model are almost similar. A detailed CAD simulation was performed. Both desired and clearance-affected trajectories were replicated in the CAD environment. The resulting coupler positions and orientation angles from the CAD model were compared to the position and orientation obtained from the mathematical model to ensure consistency and accuracy.
Fig. 23(a-d) Verification of position and orientation with joint clearance using CAD model approach.
Table 7. Comparison of the deviated coupler position and output angle between the mathematical model and CAD model.Coupler position4R mechanism with clearanceP3R mechanism with clearanceMathematical modelCAD modelMathematical modelCAD model B x
B y θ_3_º B x
B y θ_3_º B x
B y θ_3_º B x
B y θ_3_ºP124.01587.24834.2324.0187.2434.2324.0087.2734.2424.0087.2734.24P11-26.615131.92560.7-26.61131.9260.7-26.625131.9360.71-26.61131.9260.71
Error compensation of R-type & P-type mechanisms
The angle of error compensation obtained through the inverse kinematics to compensate the maximum positional error in each input position (rotary actuator) due to joint clearance (1 mm radial link) for 4R and P3R mechanisms are determined by Tables 8 and 9. The compensation of the error is beneficial for the mechanism to regain its desired position.
Table 8. Error compensation of 4R mechanism (radial link 1).Error compensation 4R mechanismPosition \documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{1}$$\end{document}
\documentclass[12pt]{minimal} \usepackage{amsmath} \usepackage{wasysym} \usepackage{amsfonts} \usepackage{amssymb} \usepackage{amsbsy} \usepackage{mathrsfs} \usepackage{upgreek} \setlength{\oddsidemargin}{-69pt} \begin{document}$$\theta_{{1\left( {deviated} \right)}}$$\end{document} Error compensationP122.723.320.62P228.1628.620.46P333.4633.810.35P438.6738.880.21P543.8343.930.1P648.9848.990.01P754.1753.920.25P859.4359.230.2P964.8364.520.31P1070.4570.010.44P1176.3975.820.57
Table 9. Error compensation of P3R mechanism for radial link 1.Error compensation P3R mechanism radial link 1Position v
v (deviated) Error compensationP19088.431.57P294.593.031.47P39997.591.41P4103.5102.11.4P5108106.681.32P6112.5111.241.26P7117115.751.25P8121.5120.281.22P9126124.821.18P10130.5129.331.17P11135133.851.15
Comparative study between 4R & P3R mechanism
The error compensation for a 4R and P3R mechanisms with a radial link length of 0.2 are shown in Tables 10 and 11. As shown by Fig. 24, a comparison shows that the error correction required for a 4R mechanism is significantly less than that of a P3R mechanism. Similarly, the error compensation for P3R and 4R mechanisms for each point at a radial link length of 1 (Fig. 25) shows that P3R requires more error compensation than 4R mechanism. The input position and maximum orientation error for a certain radial link length were compared (Figs. 26 and 27), demonstrating the 4R’s better positional accuracy.
Table 10. Error compensation of 4R mechanism for radial link 0.2Error compensation 4R mechanism radial link 0.2PositionTheta 1Theta 1 (D*eviated)*Error compensationP122.722.830.13P228.1628.250.09P333.4633.530.07P438.6738.720.05P543.8343.850.02P648.9848.990.01P754.1754.150.02P859.4359.390.04P964.8364.770.06P1070.4570.360.09P1176.3976.280.11
Table 11. Error compensation of P3R mechanism for radial link 0.2Error compensation P3R mechanism radial link 0.2Position v
v' (Deviated) Error CompensationP19089.750.25P294.594.210.29P39998.740.26P4103.5103.250.25P5108107.760.24P6112.5112.250.25P7117116.740.26P8121.5121.190.31P9126125.70.3P10130.5130.220.28P11135134.060.94
Fig. 24. Input position vs Maximum error compensation (radial link 0.2).
Fig. 25. Input position vs Maximum error compensation (radial link 1).
Fig. 26A 4R Mechanism – Input position vs Orientation Error.
Fig. 27P3R Mechanism—Input position vs Orientation error.
This section compares the error compensation required for 4R and P3R mechanisms under joint clearance at radial link lengths of 0.2 and 1.0. As shown in Tables 10 and 11, the 4R mechanism exhibits significantly lower error compensation (0.01°–0.13°) compared to the P3R mechanism (0.24–0.94 units) for the same trajectory points (P1–P11).
Figure 24 illustrates this difference clearly for a link length of 0.2, with the P3R mechanism consistently requiring higher compensation. This trend is further confirmed at a longer link length (Fig. 25), where clearance effects are amplified, but the 4R still maintains better positional stability.
Orientation error plots (Figs. 26 and 27) also show that the 4R mechanism maintains lower and more consistent orientation error across the input range, while the P3R exhibits greater fluctuations.
Conclusions
This study’s main contribution is to examine the maximum positional inaccuracy of the 4R and P3R mechanisms when joint clearances are present. Simultaneously finding the most suitable mode of actuation i.e. prismatic or rotation for selection of robot drives. The mechanisms were studied under identical or equivalent operating conditions and having studied them, subsequent broad conclusions are derived based on the study. Firstly, throughout the whole working range (P1 to P11), the mechanical error due to joint clearances for both mechanisms varies continuously. The error is often assumed to be uniform throughout the trajectory. It was concluded that positional inaccuracy in the trajectory and all clearing links is equivalent to the same amount. Lastly, comparative analysis of positional error under the effect of joint clearance in 4R and P3R mechanisms shows that, under similar operating conditions, the 4R design displays more robustness than the P3R configuration. Thus, it is demonstrated that revolving joint actuation of robotic manipulators becomes preferable to prismatic actuation from the perspective of positional error sensitivity.
It will be beneficial to utilize the developed approach and reported performance to investigate parallel mechanisms with R-type and P-type mechanisms. Future research will focus on expanding the ideas and methodology employed in this work to examine further issues with mechanism performance.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Tasora, A. &Edzeario, S. M. Experimental investigation of Clearance effect in a revolute Joint. In 2004 AIMETA International Tribology Conference, Rome, Italy (2004).
- 2Jawale, H. & Thorat, H. Positional accuracy analysis in serial chain and four-bar closed chain manipulator. In ASME 2014 International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers V 011T 014A 010- V 011T 014A 010 (2014).
- 3Jaiswal, A. & Jawale, H. Comparative study of mechanical error in P 3R and 4R manipulators. In ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers V 05BT 07A 044-V 005BT 007A 044 (2016).