A soft 3-DOF interaction force measurement system for estimating the biomechanical effects of a soft wearable robot on the human joint
Seongyun Cho, Byungjun Jeon, Minki Kim, Seongok Chae, Seungmin Ye, Yoo-Jin Jun, Yong-Lae Park, Hyung-Soon Park

TL;DR
This paper introduces a soft sensor system to measure how wearable robots affect joint biomechanics, aiming to improve safety and comfort.
Contribution
A novel soft 3-DOF force measurement system is proposed to analyze the biomechanical effects of wearable robots on human joints.
Findings
A custom sensor using Hall effect sensors and a neodymium magnet measures normal and shear forces in wearable robots.
The proposed method enables calculation of joint reaction forces and moments during human-robot interaction.
The system can improve wearable robot design for long-term safety and wearability.
Abstract
Recent advancements in wearable robots have focused on developing soft, compliant, and lightweight structures to provide comfort for the users and to achieve the primary function of assisting body motions. The interaction forces induced by physical human-robot interaction (pHRI) not only cause skin discomfort or pain due to relatively high localized pressures but also degrade the wearability and the safety of the wearer’s joints by unnaturally altering the joint reaction forces (JRFs) and the joint reaction moments (JRMs). Although the correlation between excessive JRFs/JRMs and joint-related conditions has been reported by researchers, the biomechanical effects of forces and moments caused by the pHRI of a wearable robot on the wearer’s joints remain under-analyzed. In this study, we propose a method of measuring and analyzing these interactions and effects, using a custom-designed…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
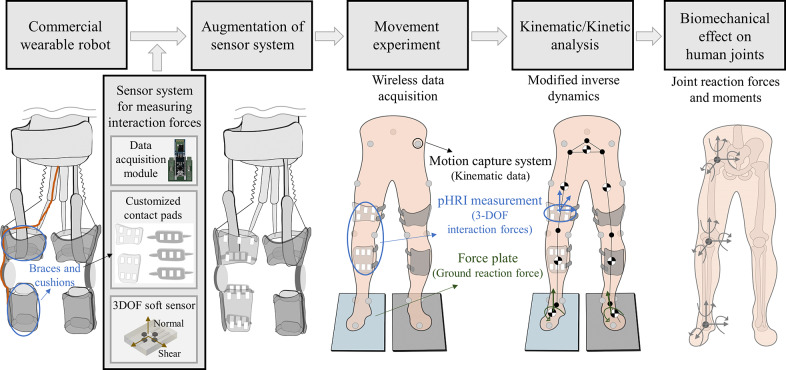 Figure 1
Figure 1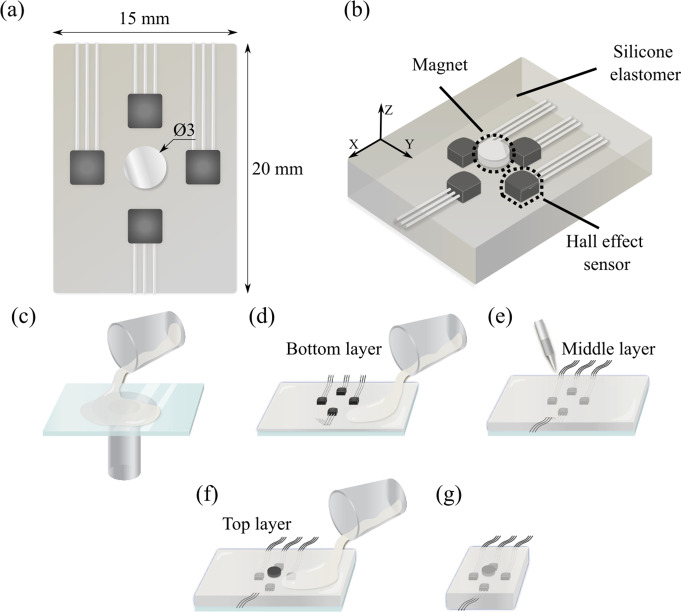 Figure 2
Figure 2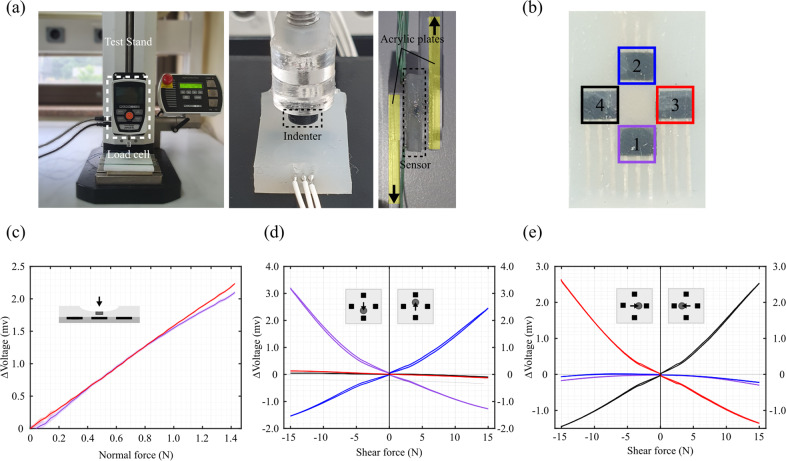 Figure 3
Figure 3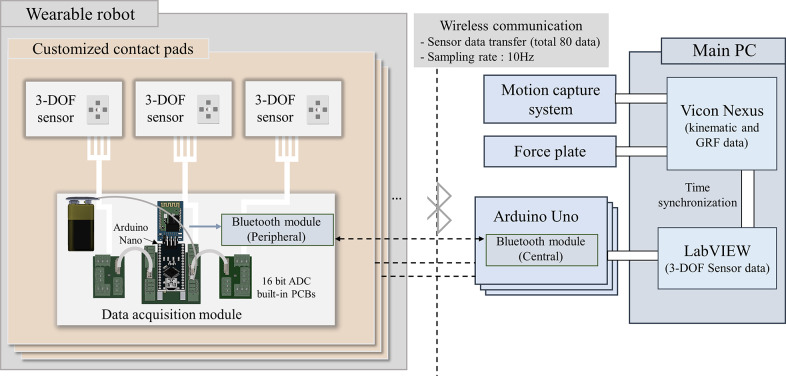 Figure 4
Figure 4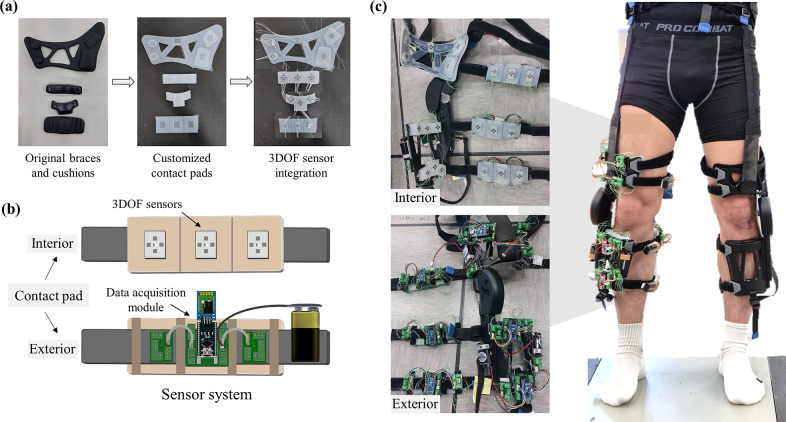 Figure 5
Figure 5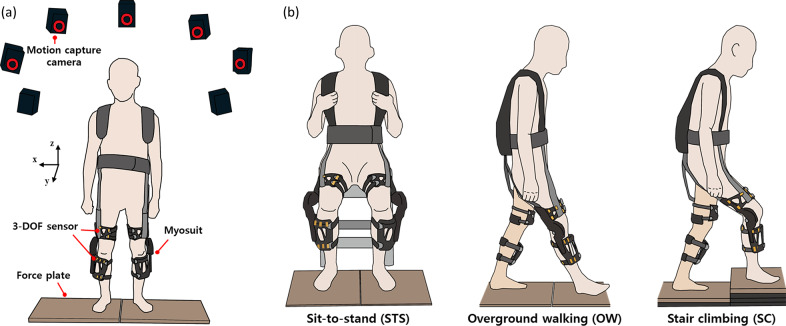 Figure 6
Figure 6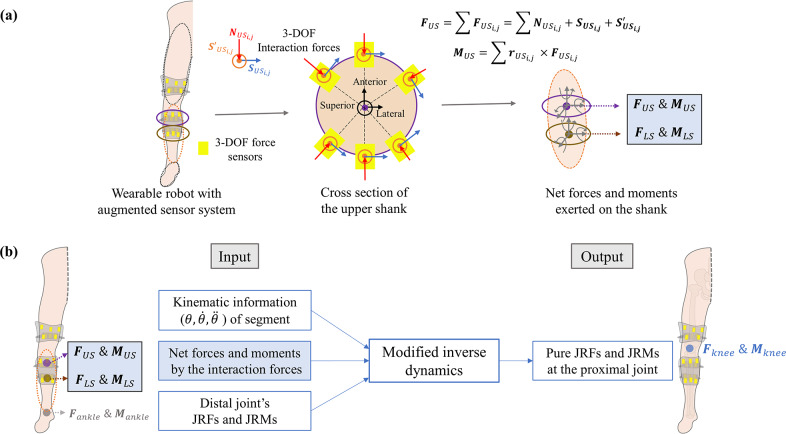 Figure 7
Figure 7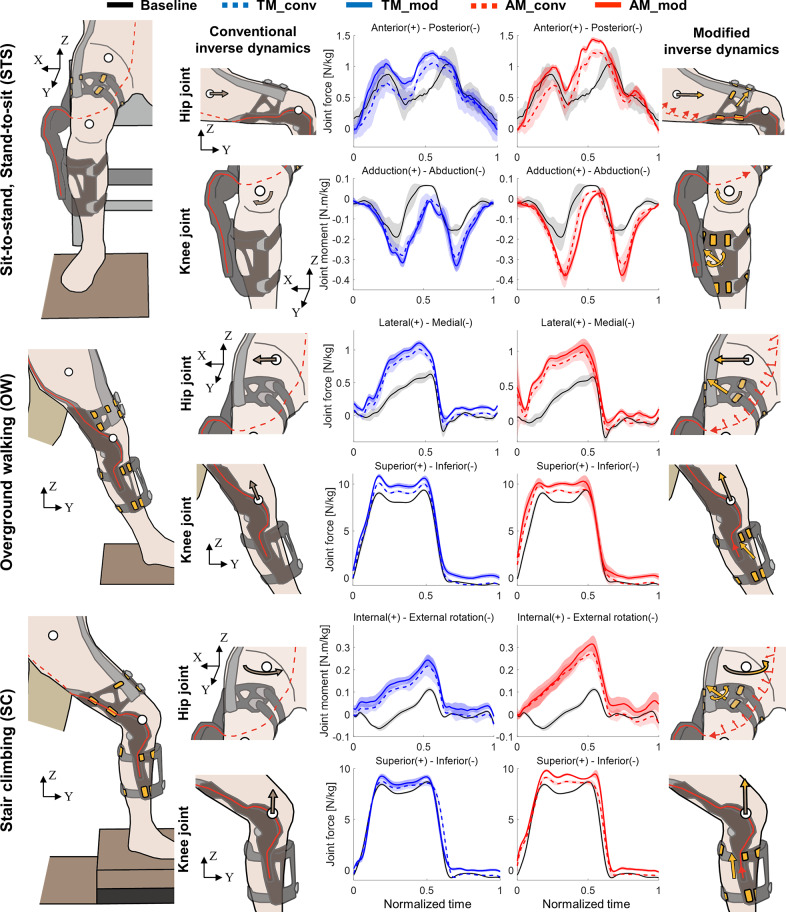 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMuscle activation and electromyography studies · Prosthetics and Rehabilitation Robotics · Stroke Rehabilitation and Recovery