The curious transference of sensations in the ‘mismatched-palm’ rubber hand illusion
Nicholas Christos, Jen Mulholland, Margaret O’Leary, Rebekah C. White

TL;DR
People can feel as if a rubber hand is their own even when it's touched in a way that doesn't match their real hand.
Contribution
Demonstrates the rubber hand illusion works despite mismatched hand positions and touch locations.
Findings
Participants felt ownership of a rubber hand despite postural and tactile mismatches.
The illusion persisted even when touch locations on the rubber and real hands differed.
The phenomenon aligns with principles for successful embodiment proposed by Riemer et al.
Abstract
We describe a disconcerting illusion. The participant looks at the palm of a left rubber hand being touched while receiving synchronous touch on the back of their own hidden right hand. Despite postural incongruence, mismatching handedness and touch being at a different location on the viewed and hidden hands, participants experience the illusion of ownership of the rubber hand and the illusion of feeling touch on the rubber hand. The robustness of the rubber hand illusion to seemingly profound incongruencies is explained with reference to Riemer et al.’s four basic principles for successful embodiment.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
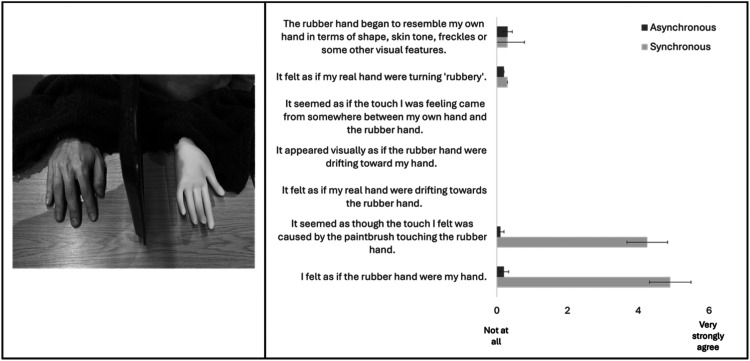 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsVirtual Reality Applications and Impacts · Action Observation and Synchronization · Tactile and Sensory Interactions
How to cite this article
Christos, N., Mulholland, J., O'Leary, M., & White, R.C. (2025). The curious transference of sensations in the ‘mismatched-palm’ rubber hand illusion. i–Perception, 16(0), 1–4. https://doi.org/10.1177/20416695251335161
In the 25 years since it was first described by Botvinick and Cohen (1998), the rubber hand paradigm has become the flagstone method for eliciting a visuotactile illusion of body ownership. In its most simple form, a left rubber hand^ 1 ^ is placed – palm facing down – on the table in front of the participant. The participant's own left hand is also placed – palm facing down – on the table, but hidden from view. The experimenter administers synchronous (same timing) touch to both hands. Most participants experience a compelling illusion: it seems that the viewed rubber hand is the participant's hand (ownership) and that the participant is feeling touch on the rubber hand (visual capture of touch).
The illusion is explained with reference to multisensory perceptual correlations (see Ehrsson et al., 2004); when what the participant sees on the rubber hand and feels on their own hand are correlated, they interpret the seen and felt inputs as being part of a single event – vision ‘captures’ touch and the viewed rubber hand is experienced as if it is the participant's own hand.
Previous studies have shown that, for the illusion to occur, it is important that the participant views touch on a realistic-looking hand rather than an object (Gentile et al., 2013). The viewed hand should be corresponding handedness and posturally-aligned with the participant's hidden hand (Tsakiris & Haggard, 2005). It should also be touched in the corresponding location (Costantini & Haggard, 2007; Riemer et al., 2014).
In an undergraduate tutorial, we experimented with the set-up of the rubber hand paradigm and stumbled upon a curious variant! A left rubber hand was placed palm facing up on the table and the participant's own right hand was placed palm facing down (Figure 1, left panel).^ 2 ^ The experimenter administered synchronous strokes and taps to the two hands – ensuring the same finger on each hand was being stroked or tapped, even though for the viewed hand it was on the palm side and for the hidden hand it was the dorsal side. We expected that mismatching handedness, hand orientation and location of touch would break the illusion. And yet, we all experienced a rubber hand illusion. Subsequently, we tested ten naive participants (10 female, Mage = 21). Experience of the rubber hand illusion was measured using a modified version of Botvinick and Cohen's (1998) questionnaire. When touch was synchronous, nine participants reported the illusion of ownership and visual capture (Figure 1, right panel).
(Left panel) paradigm set–up. Viewed left rubber hand positioned palm facing up with the participant's right hand positioned palm facing down; and vision of the participant's right hand precluded by way of a visual divider – in this case a lunch tray from the College Hall! (Right panel) results of rubber hand questionnaire administered following 120–s synchronous and 120–s asynchronous stimulation (order randomised). The top five questions – as presented on the figure – are control questions and the bottom two questions capture experience of the illusion (order of presentation was randomised). Error bars represent 1 SEM.
Riemer et al. (2014) investigated mapping of viewed and hidden touch. Participants did not experience the rubber hand illusion when the viewed and hidden hand were touched at a different location; for example, the index finger of the viewed hand and the middle finger of the hidden hand. They proposed four basic principles for successful embodiment of a rubber hand: (a) synchronicity of touch, (b) body unity – whereby the viewed hand must be positioned such that it could be connected to the body, (c) matched rudimental bodily shape and (d) congruent mapping of viewed and hidden touch.
Our results can be understood with reference to Riemer et al.'s (2014) four basic principles. Although our set-up involved profound incongruencies, the principles of synchronicity and body unity were met. Moreover, despite incongruent handedness and posture, the thumb was leftmost on both hands (from the participant's perspective) and this seems sufficient for meeting the principle of matched rudimental bodily shape. Finally, whilst touch was administered to a different location – palm viewed hand, back hidden hand – the touched finger was the same and the spatial configuration of that finger, relative to the other fingers was matched. When the experimenter moved between touching the thumb and index finger, for example, this involved the same rightward shift on both hands. Thus, we argue that there was sufficiently congruent mapping of viewed and hidden touch.
The results contribute to work exploring the constraints on the rubber hand illusion. We demonstrate that embodiment is possible, even in the face of seemingly large incongruencies – different handedness, different posture, different location of touch. Congruent mapping of viewed and hidden touch has been identified as necessary to embodiment (Riemer et al., 2014). We show that mapping can meet the congruency requirement when the two hands are touched in different locations (palm vs. back), provided the finger that is touched is the same; a nuance rendered possible by our use of mismatching hands and postures!
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Botvinick M. Cohen J. (1998). Rubber hands ‘feel’ touch that eyes see. Nature, 391, 756. 10.1038/35784 9486643 · doi ↗ · pubmed ↗
- 2Costantini M. Haggard P. (2007). The rubber hand illusion: Sensitivity and reference frame for body ownership. Consciousness and Cognition, 16, 229–240. 10.1016/j.concog.2007.01.001 17317221 · doi ↗ · pubmed ↗
- 3Ehrsson H. H. Spence C. Passingham R. E. (2004). That's my hand! activity in premotor cortex reflects feeling of ownership of a limb. Science, 305, 875–877. https://doi.org/doi/10.1126/science.109701115232072 10.1126/science.1097011 · doi ↗ · pubmed ↗
- 4Gentile G. Guterstam A. Brozzoli C. Ehrsson H. H. (2013). Disintegration of multisensory signals from the real hand reduces default limb self-attribution: An f MRI study. The Journal of Neuroscience, 33, 13350–13366. 10.1523/JNEUROSCI.1363-13.2013 23946393 PMC 3742923 · doi ↗ · pubmed ↗
- 5Ionta S. Sforza A. Funato M. Blanke O. (2013). Anatomically plausible illusory posture affects mental rotation of body parts. Cognitive, Affective, and Behavioural Neuroscience, 13, 197–209. 10.3758/s 13415-012-0120-z 22993114 · doi ↗ · pubmed ↗
- 6Ocklenburg S. Rüther N. Peterburs J. Pinnow M. Güntürkün O. (2011). Laterality in the rubber hand illusion. Laterality, 16, 174–187. 10.1080/13576500903483515 20198533 · doi ↗ · pubmed ↗
- 7Riemer M. Fuchs X. Bublatzky F. Kleinböhl D. Hölzl R. Trojan J. (2014). The rubber hand illusion depends on a congruent mapping between real and artificial fingers. Acta Psychologica, 152, 34–41. 10.1016/j.actpsy.2014.07.012 25103418 · doi ↗ · pubmed ↗
- 8Tsakiris M. Haggard P. (2005). The rubber hand illusion revisited: Visuotactile integration and self-attribution. Journal of Experimental Psychology: Human Perception and Performance, 31, 80–91. 10.1037/0096-1523.31.1.80 15709864 · doi ↗ · pubmed ↗