Octopus-Inspired Underwater Gripper with Rapid Stiffness Tuning and Robot Enabling Upward Transport
Mingxin Wu, Yurong Liu, Jiaxi Wu, Waqar Hussain Afridi, Xingwen Zheng, Chen Wang, Guangming Xie

TL;DR
A new octopus-inspired underwater gripper can quickly change stiffness and help robots transport objects underwater efficiently.
Contribution
The gripper achieves the fastest stiffness transition time reported, enabling versatile underwater manipulation.
Findings
The gripper softens in 1.3 s and rigidifies in 0.8 s, the shortest transition time reported.
It can grasp objects of varying weight and rigidity in cluttered underwater environments.
The robot integrates active buoyancy control and manipulation for vertical transport.
Abstract
Underwater operations—such as marine environmental protection, resource recovery, and seabed exploration—require grippers with high adaptability. Existing rigid and soft grippers are constrained by their inherent material limitations, restricting their manipulation versatility. In this work, we introduce an octopus-inspired underwater gripper with rapidly tunable stiffness, integrated into an upward transport robot designed for efficient underwater object manipulation. Achieving softening in 1.3 s and rigidification in 0.8 s, the gripper demonstrates the shortest stiffness transition time reported to date, substantially advancing rapid and adaptive underwater manipulation. Emulating the octopus’s multimodal grasping strategy, the system can handle a wide range of objects—from light to heavy and soft to rigid—even in cluttered underwater environments. The integrated robot combines active…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
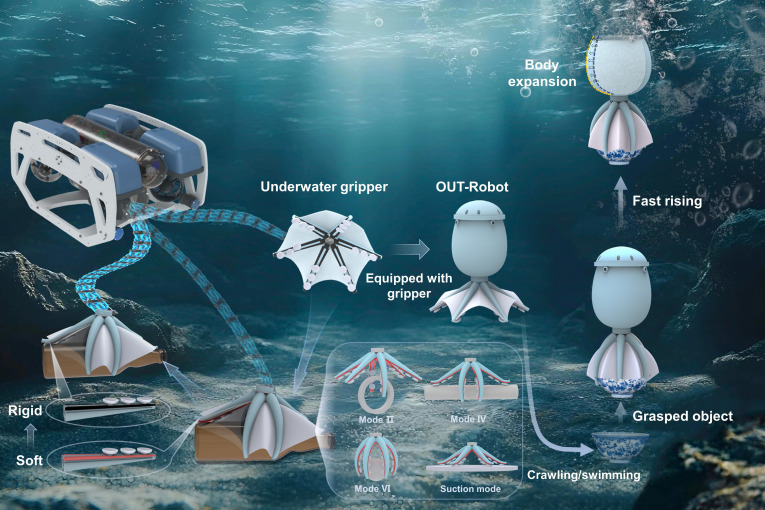 Figure 1
Figure 1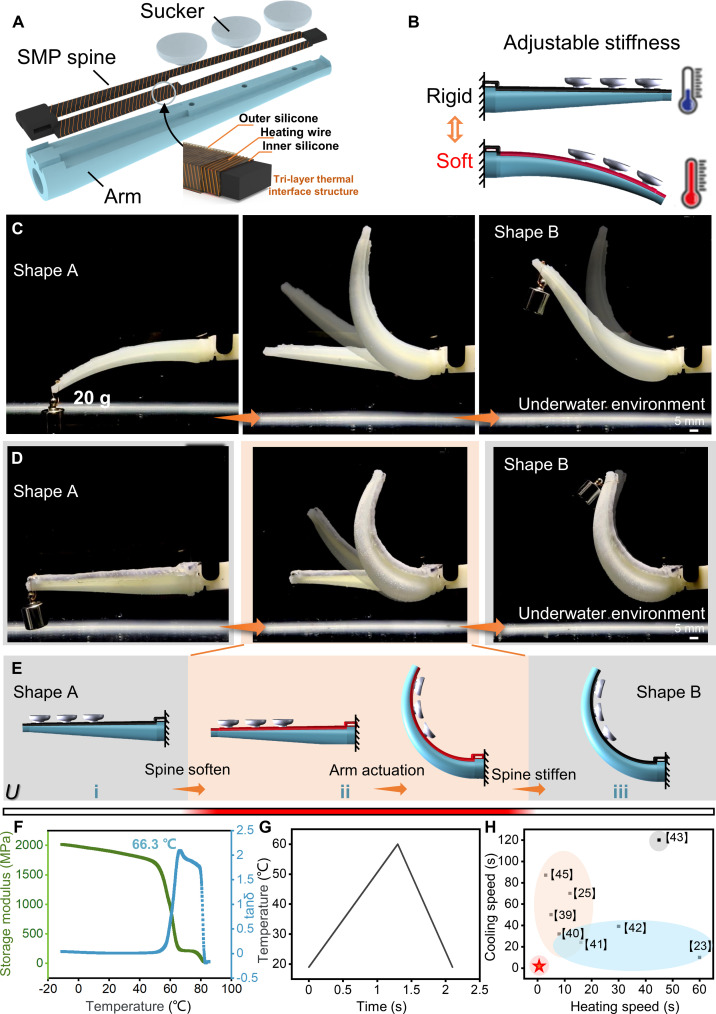 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4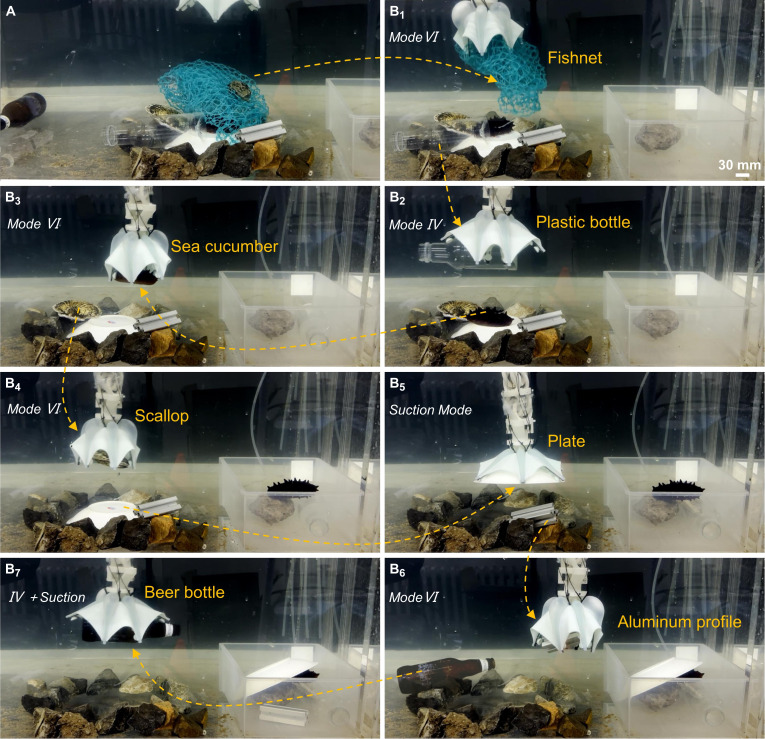 Figure 5
Figure 5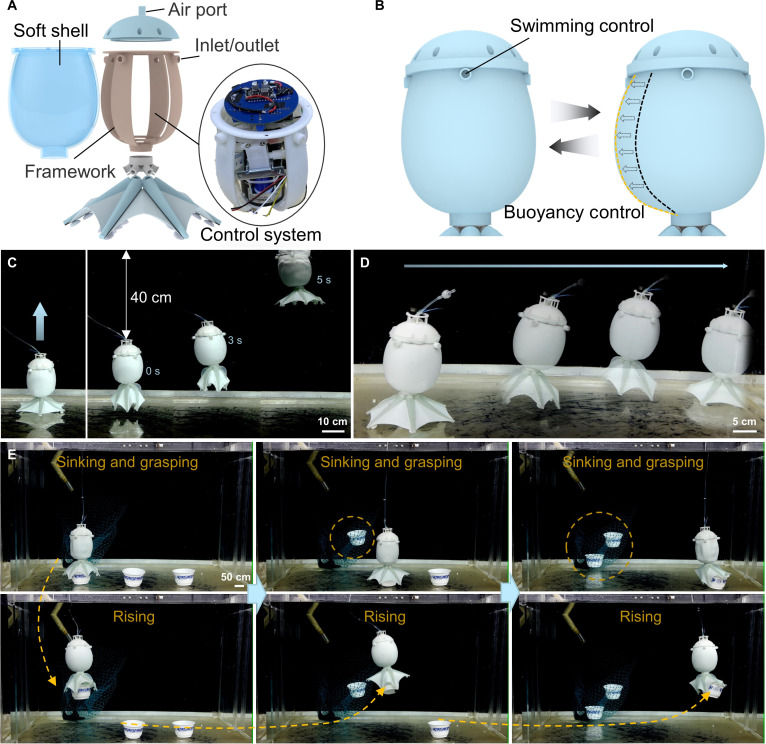 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Dielectric materials and actuators · Underwater Vehicles and Communication Systems