Intermittent Active Inference
Markus Klar, Sebastian Stein, Fraser Paterson, John H. Williamson, Henrik Gollee, Roderick Murray-Smith

TL;DR
This paper introduces Intermittent Active Inference, a new method that reduces computational load while maintaining performance in tasks like mouse pointing.
Contribution
The novel Intermittent Active Inference framework enables intermittent planning based on prediction error thresholds and Expected Free Energy.
Findings
IAIF reduces computation time while maintaining task performance in mouse pointing tasks.
Increasing the number of sampled plans during planning improves performance in IAIF.
The Expected Free Energy trigger requires no additional calibration.
Abstract
Active inference provides a unified framework for perception and action as processes of minimizing prediction error given a generative model of the environment. Whilst standard formulations assume continuous inference and control, empirical evidence indicates that humans update their control strategies intermittently, which reduces computational demands and mitigates propagation of correlated noise in closed feedback loops. To address this, we introduce Intermittent Active Inference (IAIF), a novel variant in which sensing, inference, planning, or acting can occur intermittently. This paper investigates intermittent planning, where IAIF agents follow their current plan and only re-plan when the prediction error exceeds a predefined threshold or the Expected Free Energy associated with the current plan surpasses prior estimates. We evaluate intermittent planning in a mouse pointing task,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
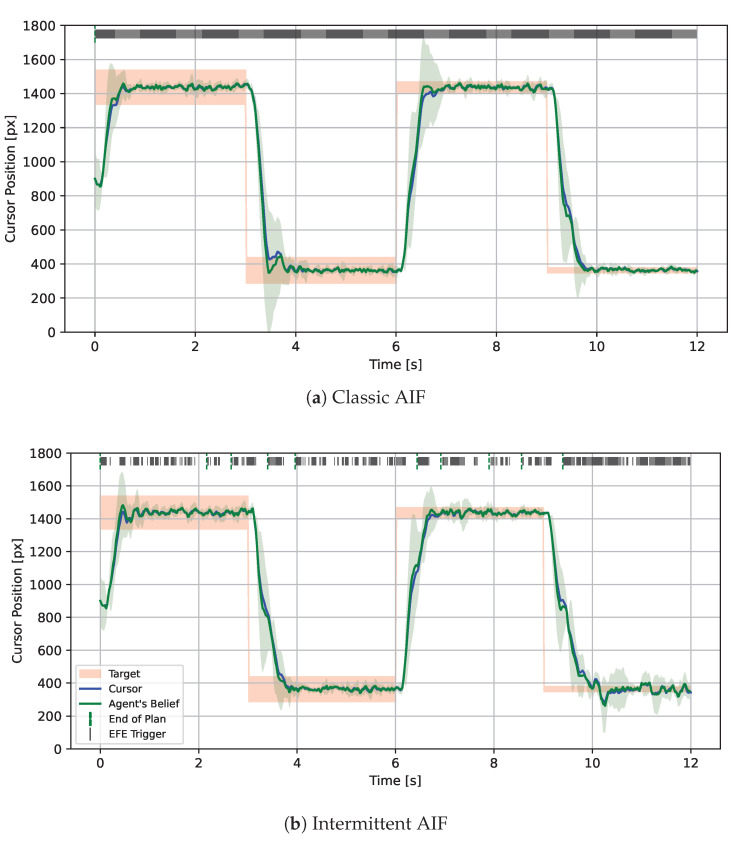 Figure 1
Figure 1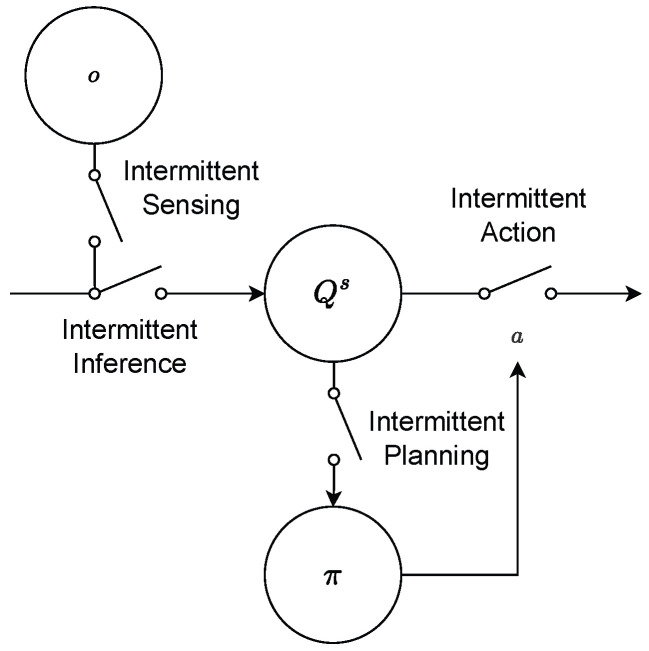 Figure 2
Figure 2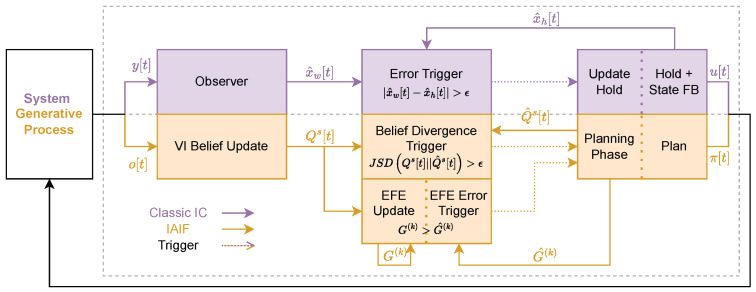 Figure 3
Figure 3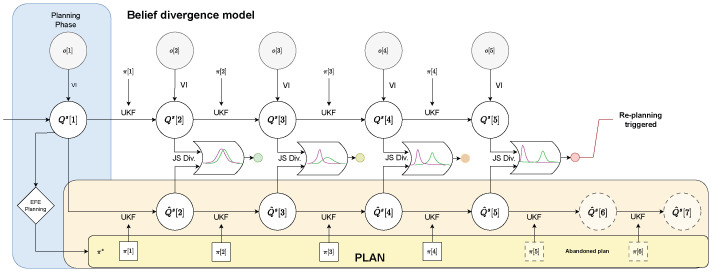 Figure 4
Figure 4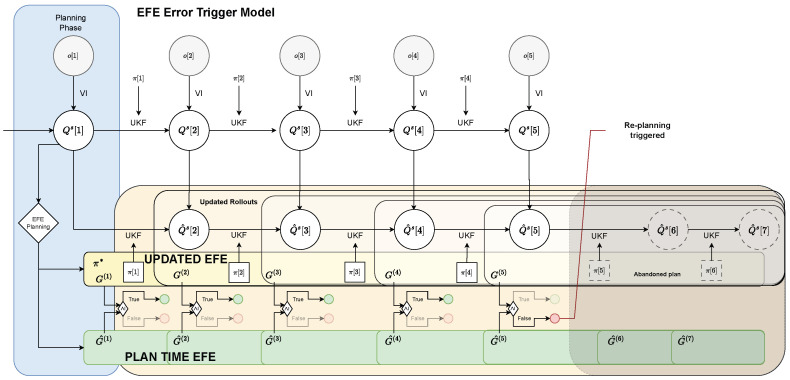 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8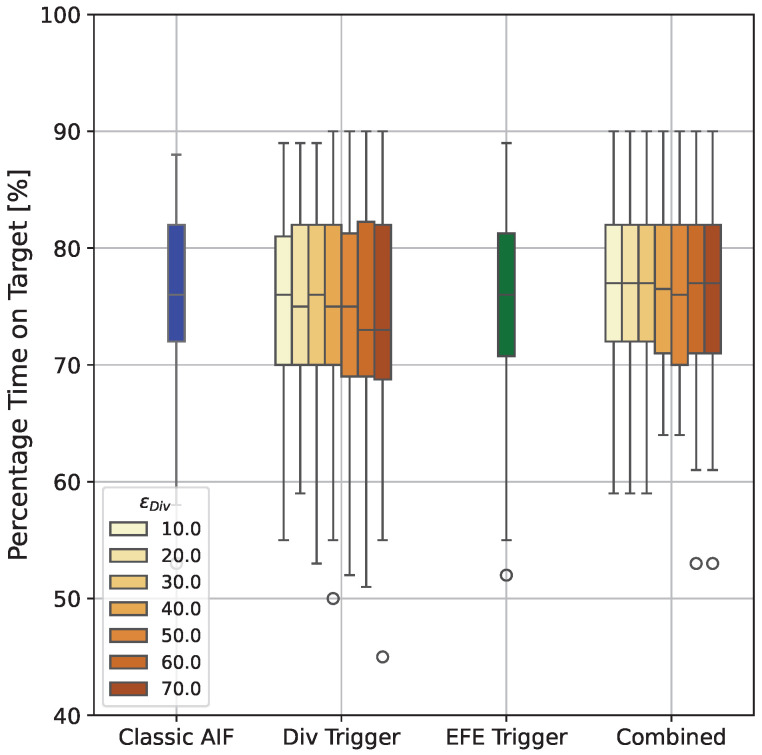 Figure 9
Figure 9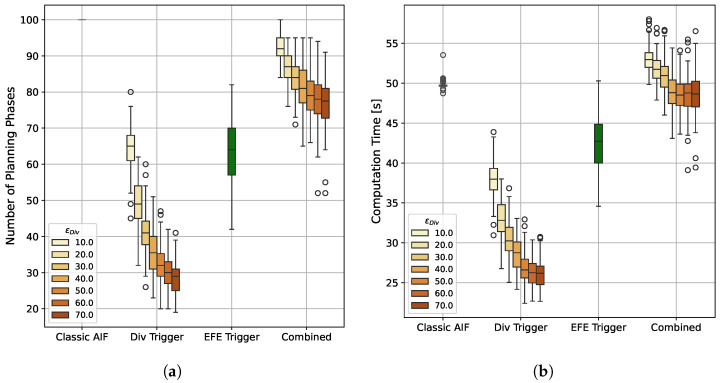 Figure 10
Figure 10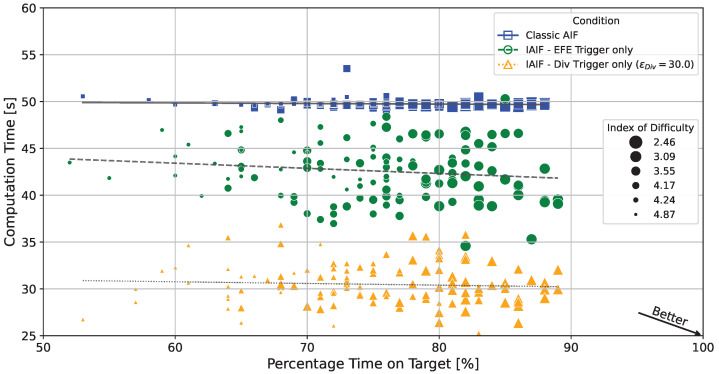 Figure 11
Figure 11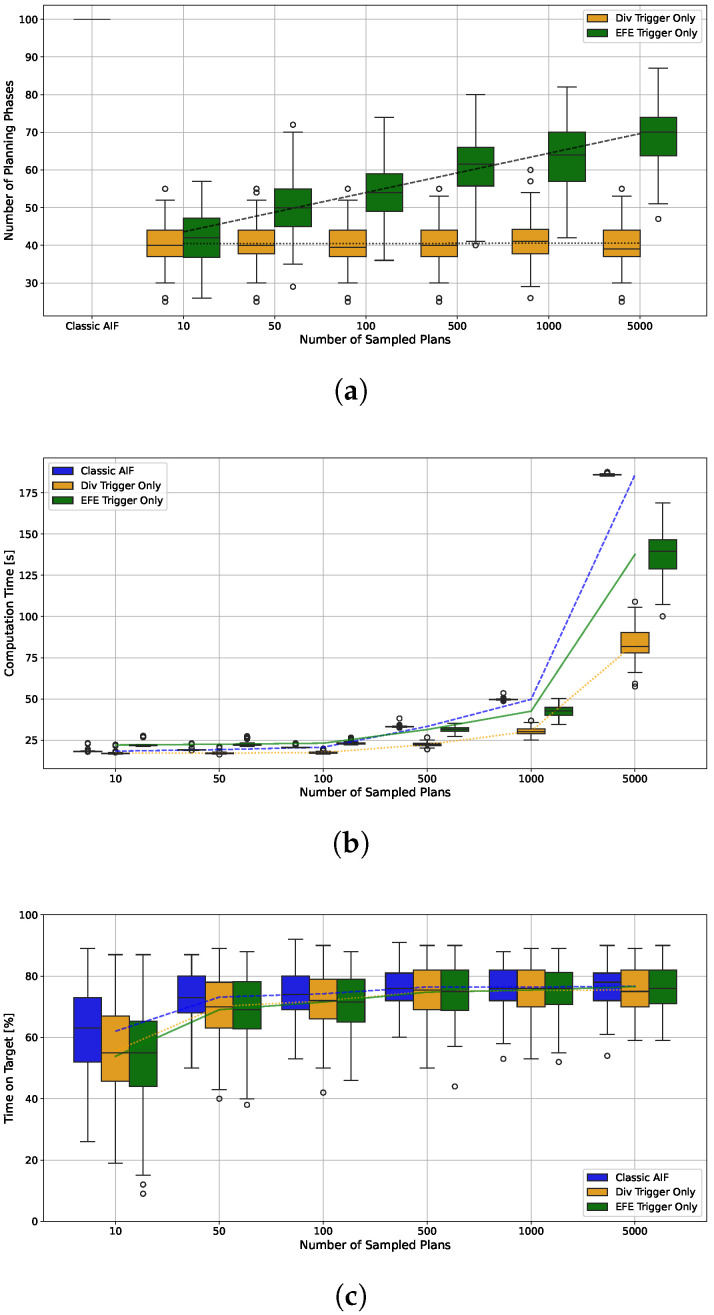 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16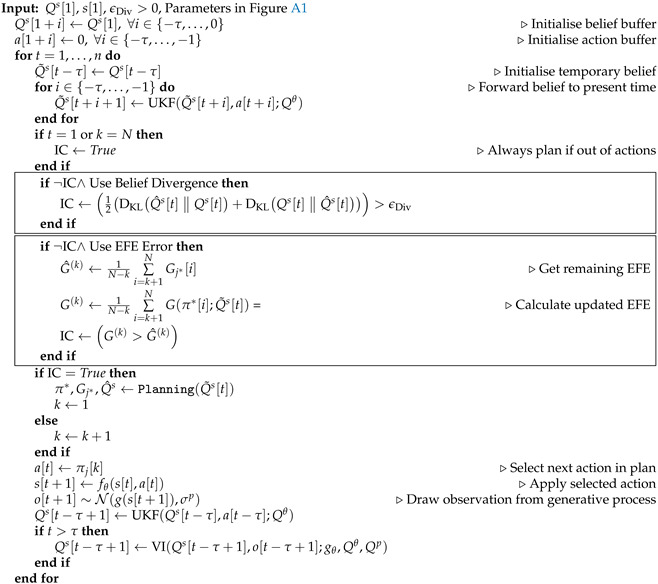 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsEmbodied and Extended Cognition · Reinforcement Learning in Robotics · Robot Manipulation and Learning