A Novel Binary Dream Optimization Algorithm with Data-Driven Repair for the Set Covering Problem
Broderick Crawford, Hugo Caballero, Gino Astorga, Felipe Cisternas-Caneo, Marcelo Becerra-Rozas, Alan Baeza, Gabriel Bernales, Pablo Puga, Giovanni Giachetti, Ricardo Soto

TL;DR
This paper introduces a new binary optimization algorithm for solving complex set covering problems efficiently.
Contribution
A discrete adaptation of the Dream Optimization Algorithm with a data-driven repair mechanism for binary and constrained problems.
Findings
The proposed algorithm achieves high-quality solutions with low deviation from known optima.
The adaptive repair mechanism improves stability and performance across multiple runs.
Abstract
The Set Covering Problem is a fundamental NP-hard problem in combinatorial optimization and plays a central role in a wide range of industrial decision-making processes, including logistics planning, scheduling, facility location, network design, and resource allocation. In many real-world contexts, problems of this type are large in scale and highly constrained, which makes exact solution methods computationally impractical and encourages the use of metaheuristic approaches capable of producing high-quality solutions within limited time budgets. In this work, we propose a discrete adaptation of the Dream Optimization Algorithm, focusing on the challenges that emerge when algorithms originally designed for continuous search spaces are applied to binary and strongly constrained models. The continuous search process is mapped onto the binary decision space through a fixed discretization…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
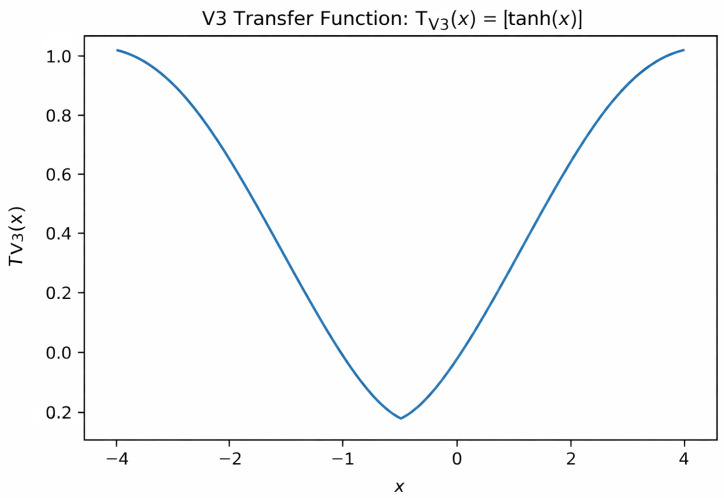 Figure 1
Figure 1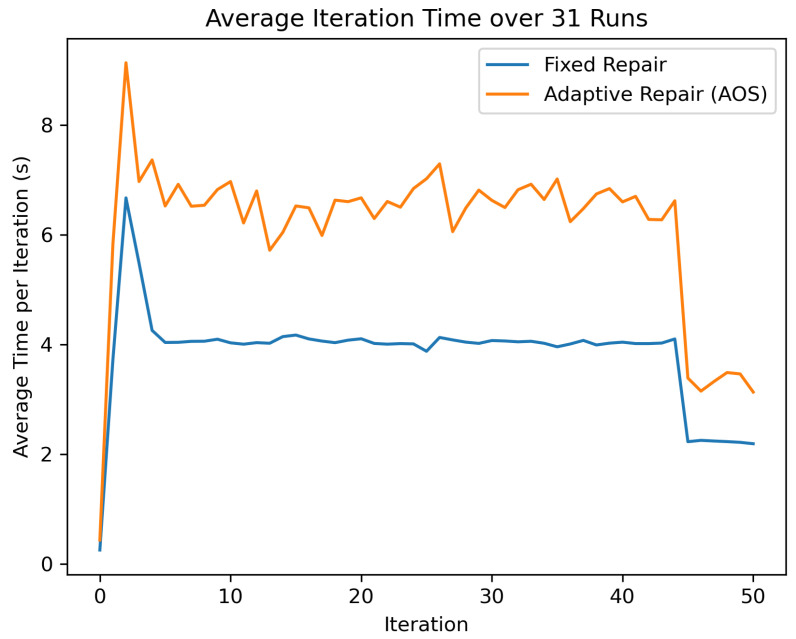 Figure 2
Figure 2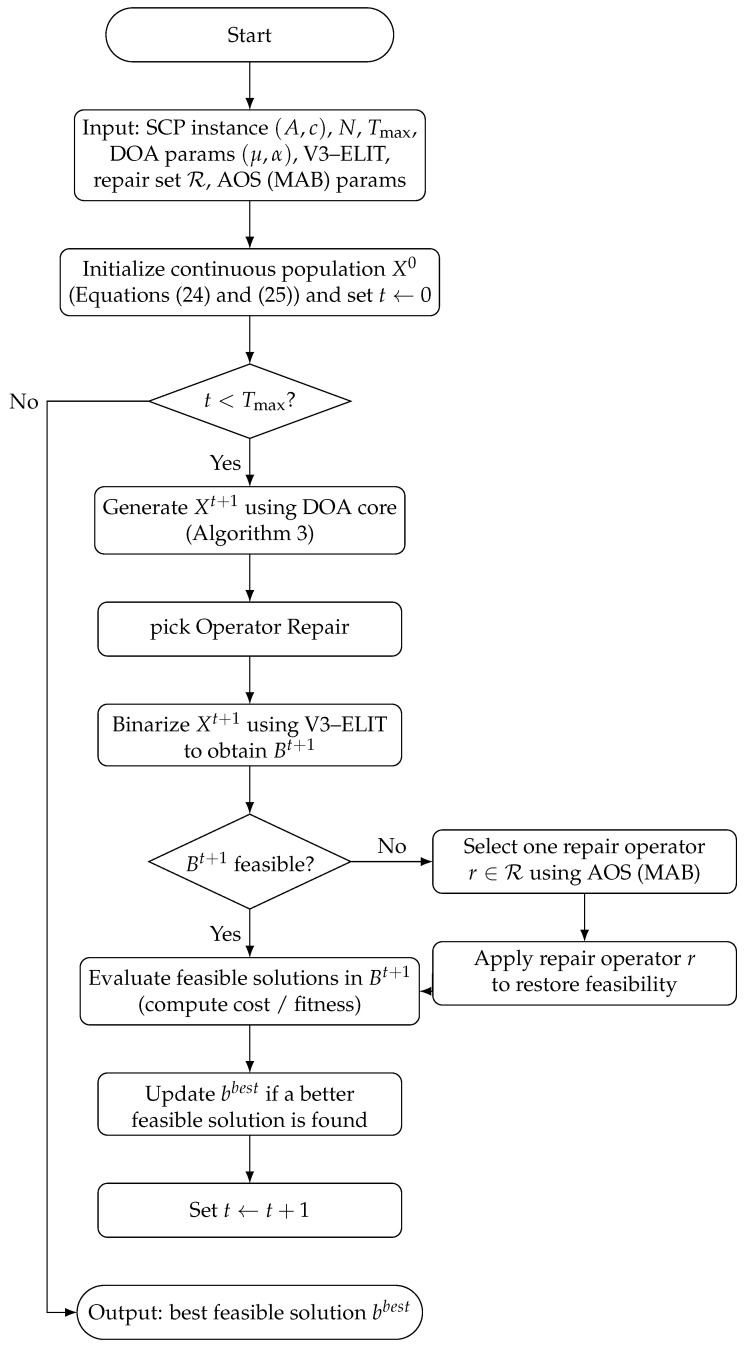 Figure 3
Figure 3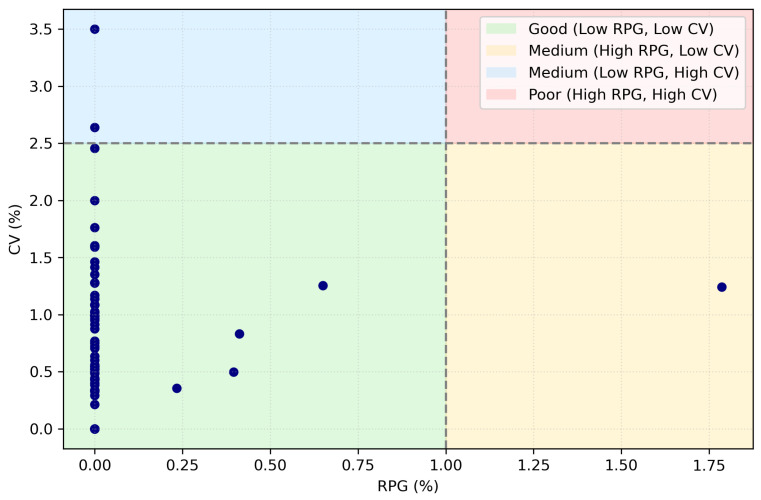 Figure 4
Figure 4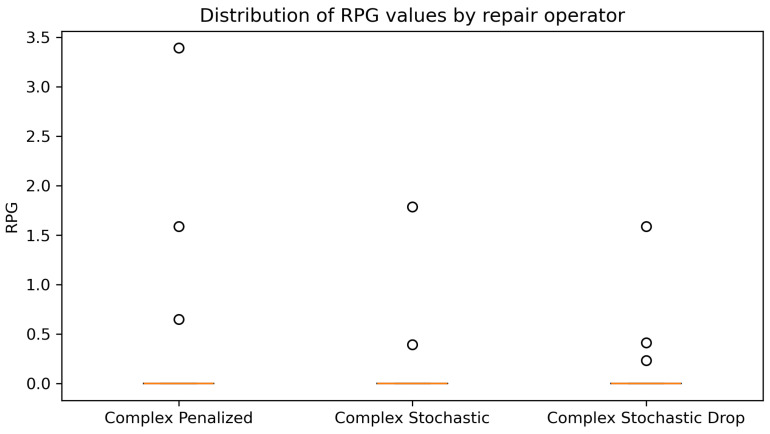 Figure 5
Figure 5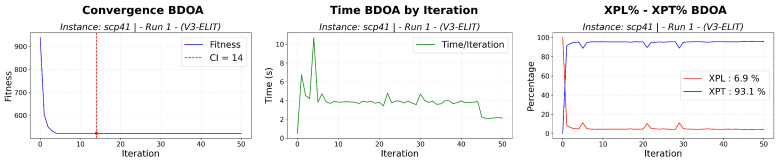 Figure 6
Figure 6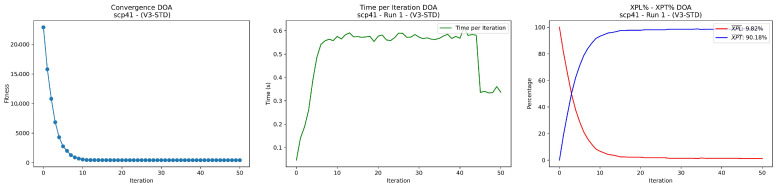 Figure 7
Figure 7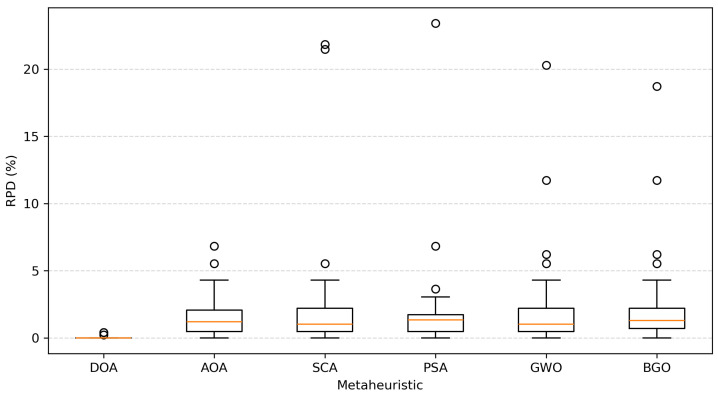 Figure 8
Figure 8- —National Agency for Research and Development (ANID)
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsVehicle Routing Optimization Methods · Metaheuristic Optimization Algorithms Research · Facility Location and Emergency Management
1. Introduction
Metaheuristic algorithms have become a widely adopted alternative for tackling complex optimization problems that arise in real world applications, particularly in situations where classical mathematical programming approaches fail to provide solutions within acceptable computational times [1]. These problems are often characterized by large decision spaces, multiple constraints, and strong combinatorial complexity, which rapidly renders exact methods impractical even for instances of moderate size [2]. Such difficulties are especially apparent in industrial contexts including logistics, telecommunications, and manufacturing, where the growing presence of Internet of Things technologies increases the demand for optimization strategies that are both robust and computationally efficient [3,4].
In this work, a version of the Dream Optimization Algorithm (DOA) adapted to solve the Set Covering Problem (SCP) is presented. This algorithm is inspired by the rapid eye movement (REM) sleep phase, in which solutions are fragmented and reorganized to generate new combinations, allowing large exploratory jumps and reducing the risk of premature convergence to local optima [5]. DOA was selected primarily because its original study reports competitive or superior performance on standard CEC benchmark suites with a reduced number of control parameters, making it a robust and well-validated baseline for methodological extensions.
To enable DOA to operate on the SCP, two essential components are required: a binarization mechanism and a solution repair phase. While binarization allows exploration of the binary search space, it may generate infeasible solutions that violate coverage constraints [6,7]. Therefore, a repair mechanism becomes necessary to restore feasibility. The effectiveness of repair operators depends strongly on the structural characteristics of each instance, and relying on a single fixed strategy may limit the performance and robustness of the optimization process.
To address this limitation, the repair phase is treated as an adaptive component of the search process. A multi-armed bandit (MAB) mechanism [8] is employed to dynamically select the most appropriate repair operator from a predefined set according to its observed contribution to solution quality. This strategy is consistent with principles widely explored in adaptive operator selection and hyperheuristic frameworks. From a biomimetic perspective, this adaptive selection mechanism reflects reinforcement dynamics observed in biological systems, where behavioral strategies that lead to improved outcomes tend to be strengthened over time, while less effective responses are progressively suppressed. In this way, the learning component operates at the decision level, guiding the selection of repair operators without altering the discretization scheme or the core dynamics of the algorithm.
In this context, the present work makes three main contributions. First, it proposes a binary adaptation of the Dream Optimization Algorithm for the Set Covering Problem, addressing the challenges that arise when a metaheuristic originally designed for continuous search spaces is applied to a binary and highly constrained combinatorial problem. Second, the study introduces an adaptive feasibility restoration mechanism in which the repair phase is treated as an active component of the search process and is dynamically managed through a multi armed bandit strategy, allowing different repair operators to be selected according to their observed contribution to the optimization. Third, the proposed approach is assessed through an extensive experimental evaluation on standard SCP benchmark instances, enabling a detailed analysis of solution quality, robustness, and the role played by adaptive repair control in the overall performance of the algorithm.
The remainder of this paper is organized as follows. Section 2 introduces the SCP and its main industrial applications. Section 3 describes the feasibility restoration phase. Section 4 presents the original DOA and its exploration and exploitation mechanisms. Section 5, defines the binarization scheme adopted in this study. Section 6 details the proposed binary adaptation of DOA, including the validation and repair mechanism. Section 7 presents the experimental results and a descriptive comparison with several well established metaheuristic methods. Section 8 summarizes the main novelties of the proposed approach for solving the SCP. Finally, Section 9 presents the main conclusions and Section 10 discusses possible extensions of the proposed methodology.
2. Set Covering Problem
The Set Covering Problem is a classical combinatorial optimization problem that belongs to the class of NP-hard problems [9]. It involves selecting a minimal subset of sets, from a given collection, whose union covers all elements of a given universe. The ultimate goal is to ensure that no element of this universe remains uncovered while minimizing the overall selection cost. This characteristic makes the problem particularly relevant for both theoretical optimization research and applications in real world environments.
In the last two years, research on the Set Covering Problem has continued to emphasize binary adaptations of population-based metaheuristics, with particular attention to binarization mechanisms such as transfer functions and discretization rules, and their impact on solution quality [10,11]. Recent studies report binary SCP solvers that integrate transfer functions, elitist discretization schemes and diversification mechanisms to enhance exploration capabilities and robustness across benchmark instances [12,13]. Complementarily, other works have conducted systematic experimental analyzes of binarization and transfer function choices within binary metaheuristics for the SCP, consistently highlighting discretization design as a critical determinant of algorithmic performance [6].
2.1. Mathematical Formulation
Formally, the SCP can be defined mathematically as follows; Let be a universal set consisting of n elements. We also have a collection of m subsets , where each subset contains some elements of the universal set and has an associated cost . With this, we must find a subcollection of subsets from S such that every element in U is covered by at least one selected subset while also minimizing the cost.
This is done by introducing binary decision variables , which indicate whether a subset is selected or not. Their purpose is to allow the model to identify which subsets must be included to cover all elements of the set U. These variables are defined as follows:
Based on the elements defined above, the SCP can be computationally represented as a binary matrix , where each row corresponds to an element in U and each column corresponds to a subset in S, and the entries indicate whether an element belongs to a subset, as follows:
The SCP is then formulated as the following integer linear program. The objective function in Equation (1) minimizes the total cost associated with the selected subsets, as indicated by the binary decision variables . Constraint Equation (2) ensures that each element i is covered by at least one selected subset, while constraint Equation (3) enforces the binary nature of the decision variables.
2.2. Practical Application in Business
Optimization is of great importance in modern industry, as it is in decision-making and the proper use of resources [14] as well as in logistics and network design in general [15,16,17,18,19].
A practical example of the use of the SCP appears in marketing, an area that has experienced strong growth in recent years due to the diversity of communication channels and the limited availability of resources. Companies seek to maximize the efficiency of their investments; therefore, they must decide which channels to use—such as social networks, television, radio, among others—to reach target customer segments at the lowest possible cost. To formulate this problem, we define the set of market segments to be covered in Table 1, and the set of media channels available to reach a specific audience at minimum cost, as shown below:
2.3. Illustrative SCP Formulation for a Marketing Application
Let
be the set of customer segments to be covered, and
the set of available advertising media.
Each medium covers a subset , defined as
A binary decision variable is associated with each medium:
The objective is to minimize the total advertising cost:
Subject to the coverage constraints:
The result indicates that the marketing department does not need to invest in all available channels; instead, only those that cover the required customer segments should be selected. This approach optimizes the allocated budget and achieves maximum coverage at minimum cost. This practical example can be extended to advertising media selection, promotional strategies at different times, customer sampling for surveys, or campaign coverage assessments. The example illustrates any problem that aims to meet minimum while minimizing the cost of available resources.
3. Repair Phase
The repair phase has received limited attention in the literature, as it is commonly assumed to be implemented through a single, fixed method. Nevertheless, it has a significant impact on solution quality in the SCP, since it determines how infeasible solutions are transformed into feasible ones, directly influencing both the objective function value and the regions of the feasible space explored by the algorithm [20,21]. Previous studies on SCP and constrained metaheuristics have shown that repair strategies are not neutral operations, as they modify the structure and cost of solutions while conditioning the search dynamics [22,23,24]. Consequently, the design and activation of repair mechanisms play a critical role in preserving solution quality, avoiding systematic cost overruns and mitigating stagnation during the search process.
3.1. Role of the Repair Phase in the SCP
In the SCP, let denote the universe set of elements and the collection of available subsets. A solution is valid only if all elements in U are covered by at least one selected subset. However, when discretized metaheuristic approaches are employed, it is common for some generated solutions to violate this condition. The repair process is therefore designed to correct such situations by adding subsets to the solution until full coverage is restored [9]. From a mathematical perspective, a solution is infeasible if there exists at least one element such that meaning that no selected subset covers that element.
The repair mechanism operates by identifying these uncovered elements and selecting additional subsets that include them, updating the decision variables until the coverage constraint is satisfied for all elements [25,26,27,28].
3.2. Repair Strategies Adopted in This Study
The repair mechanisms employed in this study follow classical greedy heuristics for the SCP, particularly those described by Lan et al. [29], where feasibility is restored by iteratively adding subsets according to cost and coverage criteria until all coverage constraints are satisfied. These operators can be mapped in the general categories and shows in Table 2. This taxonomy is supported by foundational studies in metaheuristic design and hybridization frameworks, which emphasize the role of operator behavior in steering search dynamics [30,31].
The repair operator set was designed following established principles in adaptive operator selection and hyper-heuristic frameworks, where the objective is not to identify a single dominant operator, but to enable adaptive control over operators exhibiting distinct structural behaviors [27,33]. By including deterministic, penalized, stochastic, and hybrid repair strategies, the proposed set captures complementary feasibility restoration patterns commonly reported in SCP and constrained metaheuristics. The Table 3 shows the repair operators used in this study.
Section 3.3 presents an Adaptive Operator Selection strategy to control this phase of the algorithm.
3.3. Adaptive Operator Selection Strategy
Adaptive Operator Selection (AOS) is a decision mechanism implemented through a multi-armed bandit learning model, designed to dynamically choose among a predefined set of operators during the execution of a metaheuristic. Rather than relying on a fixed strategy, AOS updates the expected utility of each operator based on its observed contribution to the search process. In the proposed approach, AOS is employed to control the repair phase, selecting at each iteration the operator to be applied whenever an infeasible solution is generated.
The bandit controller operates in two complementary phases: a selection phase, in which a repair operator is chosen, and an update phase, in which its contribution to the search process is learned. At iteration t, a repair operator is selected according to an -greedy policy. Let . The repair operator is selected as
The instantaneous reward associated with the selected repair operator is defined as the absolute improvement in the global best solution obtained after its application. Let denote the best objective value found up to iteration t. The reward is computed as
This formulation is conceptually aligned with the fitness improvement-based credit assignment strategy described by Fialho et al. [33]. The estimated value of the selected operator is then updated using the standard sample-average incremental rule widely adopted in multi-armed bandit and reinforcement learning literature [35]:
Together, Equations (21)–(23) define a bandit-based adaptive operator selection mechanism that learns which repair strategies contribute most effectively to global optimization progress. The Table 4 explains the notation used in these equations.
Algorithm 1 defines the AOS mechanism used in this study. The method is implemented as a multi-armed bandit with an -greedy policy. At each iteration, one operator is selected, applied within the main algorithm, and its expected reward is updated based on the observed outcome. Algorithm 1 Generic Adaptive Operator Selection (multi-armed bandit).Require: Operator set , exploration rate
- 1:Initialize , for all
- 2:for to T do
- 3: Draw
- 4: if then ▹ Selection phase
- 5: Select uniformly at random from
- 6: else
- 7: Select
- 8: end if
- 9: Execution phase, defined by the underlying optimization problem
- 10: Apply operator within the main algorithm
- 11: Compute reward using Equations (21) and (23) ▹ Update phase
- 12:end for
4. Dream Optimization Algorithm
The Dream Optimization Algorithm is a bio-inspired metaheuristic developed by Yifan Lang and Yuelin Gao [5] to find optimal solutions in continuous search spaces. The method draws its inspiration from the neurological processes that occur during sleep, particularly during the stage of rapid eye movement (REM), in which memory retention, partial forgetting, and self organization of experiences emerge as dreams. Based on this biological analogy, DOA integrates three complementary strategies that mimic these cognitive phenomena throughout its search process: the memory strategy, the forgetting and supplementation strategy, and the dream sharing strategy. Together, they coordinate the balance of the algorithm between global exploration and local exploitation.
The Dream Optimization Algorithm was selected because its original study reports competitive or superior performance on standard CEC benchmark suites (CEC2017, CEC2019, and CEC2022) with a reduced number of control parameters. These results, obtained from rigorous comparisons against 27 classical, recent, and high-performing metaheuristic algorithms (see Section 4.3 and Table 2 in [5]), support the use of DOA as a well-validated baseline for methodological extensions.
A key element of the algorithm is the transition factor , which determines how the total number of iterations is divided between the exploration and exploitation phases. Specifically, the number of exploration iterations is calculated as follows:
This formulation allows the algorithm to precisely adjust the length of each phase, ensuring a controlled transition from global search to local refinement as the optimization progresses.
4.1. Initialization Phase
DOA is a population-based metaheuristic, the optimization process begins by defining an initial population of candidate solutions. Each individual represents a point in the continuous search space and is randomly generated within the predefined lower and upper bounds of the problem domain.
where N represents the number of individuals, i.e., the population size; is the ith individual in the population; and represent the lower and upper boundaries of the search space, respectively; is a dimensional vector, with each dimension being a random number between 0 and 1; the obtained population can be represented as follows:
where represents the position of the ith individual in the jth dimension, and represents the dimensionality of the optimization problem.
4.2. Exploration Phase
The exploration phase represents the stage in which the algorithm expands its search to new regions of the solution space, without yet focusing on the most promising results. This phase emulates the cognitive process of human dreaming, where the brain combines memories and experiences to generate new associations; in this stage, the individuals in the population update their positions through a combination of the best known solutions and random components, which promotes diversity and prevents premature convergence within a single region of the search space. The forgetting and supplementation strategy predominates in this process, introducing controlled variations that help the algorithm escape local optima and discover unexplored areas. Compared with conventional metaheuristics, DOA exhibits a more stable balance between exploration and exploitation, a lower dependency on control parameters, and a smoother search dynamics. Moreover, its design—rooted in cognitive processes rather than physical or biological analogies—provides greater flexibility to adapt to complex and multi objective optimization problems, achieving faster convergence and higher solution accuracy.
4.2.1. Memory Based Update Strategy
This strategy is based on keeping and reusing useful information obtained during the optimization process. Before the individuals in a group enter the “dreaming” phase, the position of the best individual found by that group is taken as a reference. Then, the positions of all individuals are updated with the coordinates of this best solution. In this way, each member starts the next iteration from a promising region of the search space. This approach allows the algorithm to take advantage of high quality information discovered in earlier stages and to strengthen the exploitation phase by guiding the population toward better areas. This is shown in Equation (27).
X represents the position of an individual within the search space. The term i identifies each individual in the population, allowing the algorithm to distinguish among the different solutions evaluated in each cycle. Finally, t denotes the iteration number.
4.2.2. Forgetting and Supplementation Strategy
This technique introduces variability into the search by allowing individuals to forget certain dimensions j of their position, which are then replaced using information from the best individual of the group along with a random component that recalculates the final value composed of the lower and upper bounds of the problem and adjusts its value depending on the current iteration t, promoting both global exploration and local exploitation. This is modeled by Equation (28).
where
: total number of iterations in the optimization process. : number of iterations assigned to the exploration phase.rand: random value uniformly distributed in the range [0, 1], introducing variability and promoting search diversity. : cosine function that regulates the transition between exploration and exploitation, gradually reducing the effect of randomness as the algorithm progresses.i: index identifying each individual or agent within the population.j: index representing a specific dimension of the search space. : set of dimensions to be forgotten and replaced in each group q, maintaining diversity and preventing premature convergence.
Furthermore, forgetting dimensions are unique for each group q, and fluctuate depending on both the dimensions of the problem and a random component that delimits the dimensions to forget between a range, encouraging diversity and preventing premature convergence. This is shown in Equation (29).
4.2.3. Dream Sharing Strategy
This technique is based on the random exchange of information between individuals , allowing them to acquire knowledge from other members by utilizing their position m within the population in certain selected forgetting dimensions j, depending on the group q to which the individual belongs. Notably, the forgetting dimensions are calculated in the same manner as in the Forgetting and Supplementation strategy, already shown in Equation (29). Ultimately by sharing parts of their “dreams”, the algorithm avoids becoming prematurely trapped in local optima and promotes a broader and more efficient exploration of the solution space. This can be seen below in Equation (30)
4.3. Exploitation Phase
The exploration phase of the DOA begins by dividing the population into five groups, each characterized by distinct memory capacities. During this stage, every iteration is treated as a dreaming process, where individuals update their positions by referencing the best solution previously obtained by their own group. Similar to human dreaming, part of the stored information is intentionally forgotten and replaced with new elements, allowing the algorithm to explore unvisited regions of the search space. The number of forgotten dimensions varies among groups and is determined by the parameters , which represent different levels of memory retention. Specifically, each individual first resets its position to that of the best member within its group, and then dimensions are randomly selected from the total problem dimensions ( ) and updated. This mechanism encourages population diversity, prevents premature convergence, and enables the algorithm to maintain a dynamic balance between creativity and memory during the exploration process.
4.3.1. Memory Strategy
This technique once again utilizes information from the best individual previously obtained . The crucial difference now is that it is applied to the entire population before the “Dreaming” process. This naturally favors convergence, guiding the entire population toward the best known solution. This can be seen below in Equation (31)
4.3.2. Forgetting and Supplementation Strategy
Similar to its use in the exploration phase, this technique is responsible for introducing perturbations in the forgetting dimension j. However, in the exploitation phase, these perturbations are applied to the entire population . The best individual acts as a base to replace the forgotten values, maintaining a delicate balance between intensive exploitation of promising areas and preventing the total loss of diversity within the population, helping avoid premature convergence to local optima, as illustrated in Equation (32).
where
: updated position of individual i in dimension j at iteration , representing the new solution after the exploitation step. : best position found so far in dimension j at iteration t, used as a reference to guide convergence toward promising regions. : current position of individual i in dimension j before applying the update rule. : position of another individual u (different from i) in dimension j, randomly selected from the same group to introduce additional variation. : maximum number of iterations, used to normalize the cosine-based modulation term.i: index representing the individual or agent within the population.j: index identifying a specific dimension of the search space.u: index of another individual selected randomly from the same group, used to create the differential perturbation .
Moreover, forgetting dimensions serve the same goal as in the exploitation phase, and are calculated similarly using the problem dimension within a defined range. However, in the absence of groups, these dimensions are applied uniformly across the entire population, as shown in Equation (33).
4.4. Algorithm Pseudo Code
The Algorithm 2 presents the pseudocode of DOA, outlining the overall process, the required input parameters, and the resulting outputs. Algorithm 2 Dream Optimization Algorithm (DOA) with explicit exploration and exploitation phases.Input: Population size , lower bounds , upper bounds , problem dimension , current iteration t, demarcation , maximum iterations , forgetting dimensions .Output: Best solution and minimum fitness .
- 1: Generate initial population X using Equations (24) and (25)
- 2: Check solution bounds
- 3: Evaluate fitness
- 4: Determine and
- 5:
- 6: while do ▹ Main loop
- 7: Update and
- 8: for do
- 9: Update and
- 10: Update using Equation (29)
- 11: Update using Equation (27)
- 12:
- 13: for do
- 14: if then
- 15: Exploration: update using Equation (28)
- 16: Check bounds
- 17: else
- 18: Exploitation: update using Equation (32)
- 19: end if
- 20: end for
- 21: end for
- 22:
- 23:end while
- 24:while and do
- 25: Update using Equation (33)
- 26: Update using Equation (27)
- 27:
- 28: for do
- 29: Exploitation: update using Equation (32)
- 30: Check bounds
- 31: end for
- 32:
- 33:end while
5. Binarization Scheme
A preliminary parameter setting phase was conducted in order to identify the most appropriate discretization scheme for adapting DOA to the binary search space of the SCP. Several combinations of transfer functions and binarization rules were evaluated under identical computational conditions. The experimental results [36] consistently indicated that the V3-ELIT discretization scheme achieved the best trade off between solution quality and search stability across the tested instances.
An additional reason for selecting V3-ELIT is its more consistent probabilistic behavior under frequent repair operations, which are typical in highly constrained problems such as the SCP. Previous studies have shown that S-type transfer functions tend to rapidly saturate probabilities toward 0 or 1, leading to premature loss of diversity and stagnation, particularly when combined with repeated feasibility restoration mechanisms [12,37]. In contrast, V-type transfer functions exhibit smoother probability transitions, which interact more stably with elitist discretization and repair mechanisms, reducing disruptive effects between exploration, exploitation, and feasibility restoration. This behavior has been empirically observed in comparative binarization studies, where V-type functions combined with elitist rules consistently show lower variability and more controlled search dynamics under constraint-handling scenarios [36,37].
The V3 transfer function (Figure 1) belongs to the family of V–shaped transfer functions and is defined as
This function maps continuous values into the interval , where larger absolute values indicate higher probabilities of bit flipping, thus promoting balanced exploration in the binary space.
The ELIT binarization rule updates each binary decision variable by comparing the output of the transfer function with the corresponding bit of the current global best solution. Specifically, a binary variable is updated as
This elitist mechanism biases the discretization process toward the structure of the best solution found so far, improving convergence while preserving diversity through stochastic perturbations.
Based on this evidence, V3-ELIT was fixed for all subsequent experiments, allowing the effect of the adaptive repair mechanism to be isolated and ensuring a fair and controlled evaluation of the proposed learning–based repair selection framework.
6. Binary DOA
In this section, we present the Binary DOA algorithm, which addresses the binary nature of the problem and enables the resolution of the SCP. This version integrates three main components. The core DOA (Section 4), which operates in a continuous space and provides the exploration and exploitation dynamics. Second, the binarization process (Section 5), which is applied to the proposed solution, and finally, since binarization may generate infeasible solutions, a feasibility restoration (Section 3) phase is incorporated, in which a set of repair operators is adaptively managed through a multi-armed bandit (MAB) mechanism. The bandit acts as a high-level decision controller, selecting the most appropriate repair operator according to its observed contribution to the overall search progress at each iteration.
6.1. Core DOA
The core of the DOA is defined by the continuous position update mechanism that generates new candidate solutions through the alternating application of exploration and exploitation operators. This core is responsible for transforming the current population into a new candidate population at each iteration and constitutes the main search engine of the algorithm. Algorithm 3 describes the core of the DOA. Algorithm 3 Core generation mechanism of DOA.Input: Current population , iteration t, demarcation iteration , maximum number of iterations , forgetting parameters , and controlparameter u.Output: New candidate continuous population .
- 1: if then ▹ Exploration–exploitation stage
- 2: for do
- 3: Update the number of forgetting dimensions using Equation (29)
- 4: Initialize using Equation (27)
- 5:
- 6: for do
- 7: if then
- 8: Exploration: update using Equation (28)
- 9: else
- 10: Exploitation: update using Equation (32)
- 11: end if
- 12: end for
- 13: end for
- 14:else ▹ Pure exploitation stage
- 15: Update the number of forgetting dimensions using Equation (33)
- 16: Initialize using Equation (27)
- 17:
- 18: for do
- 19: Exploitation: update using Equation (32)
- 20: Check bounds
- 21: end for
- 22:end if
- 23:return
Once the continuous core of DOA is defined, additional phases are incorporated to enable its application to the SCP. First, a discretization stage is applied to transform continuous candidate solutions into binary representations.
6.2. Binary DOA Discretization Process
The Binary DOA (BDOA), Algorithm 4, takes a continuous population generated by the DOA core as input and applies the V3-ELIT discretization scheme to each dimension in order to obtain. Algorithm 4 Binary DOA using a V3-ELIT discretization scheme.Input: SCP instance , population size N, maximum iterations , DOA parameters , discretization scheme V3-ELIT, repair operator set , AOS (MAB) parameter .Output: Best feasible binary solution .
- 1: Initialize continuous population using Equations (24) and (25)
- 2:
- 3: while do
- 4: Generate from using the DOA core (Algorithm 3)
- 5: Binarize using the V3-ELIT scheme
- 6: if is infeasible then
- 7: Select and apply repair operator from using AOS
- 8: end if
- 9: Evaluate all feasible solutions in
- 10: Update if a better solution is found
- 11:
- 12:end while
- 13:return
The logic of the Algorithm 4 balances solution quality and computational overhead by activating repair operations only when infeasible solutions are generated (lines 6–8), thus avoiding unnecessary computational effort on solutions that are already feasible. At each iteration, a single repair operator is selected from a predefined set using AOS, rather than applying multiple repair strategies sequentially see the Figure 2.
Empirical analysis shows that the adaptive repair mechanism increases the average iteration time by approximately compared to the fixed repair strategy (Wilcoxon test, ). The iteration time curves, which are practically parallel, indicate that this increase corresponds to a constant-factor overhead rather than a progressive growth in computational cost.
In exchange for this increase in execution time, the adaptive strategy achieves a statistically significant improvement in the average solution quality (mean improvement cost units, Wilcoxon test ), shifting the distribution of results toward lower-cost regions.
6.3. Binary DOA Using AOS
The final algorithm, Algorithm 5, combines the continuous DOA core, the V3-ELIT binarization scheme, and an AOS module into a unified framework for solving the Set Covering Problem. Algorithm 5 Binary DOA with adaptive repair selection for the SCP.Input: SCP instance , population size N, maximum iterations , DOA parameters , discretization scheme V3-ELIT, repair operator set , AOS (MAB) parameters .Output: Best feasible binary solution .
- 1: Initialize continuous population using Equations (24) and (25)
- 2: Initialize AOS bandit estimates , for all
- 3: ,
- 4:
- 5: while do
- 6: Generate from using the DOA core, using Algorithm 3
- 7: Binarize using the V3-ELIT scheme
- 8: if is infeasible then
- 9: Select repair operator using the AOS mechanism using Equation (21)
- 10: Apply the selected repair operator
- 11: end if ▹ AOS learning: reward computation
- 12: Evaluate all feasible solutions
- 13: Update and
- 14: Compute reward using Equation (22)
- 15: Update bandit estimates using Equation (23)
- 16:
- 17:end while
- 18:return
To facilitate understanding of the proposed method, a flowchart representation of Algorithm 4 is provided in Figure 3. The diagram summarizes the main stages of the Binary DOA framework, including population initialization, continuous update through the DOA core, V3-ELIT discretization, feasibility verification, adaptive repair selection using AOS, solution evaluation, and best-solution update. This visual representation highlights the interaction between discretization and adaptive repair, as well as the conditional activation of the repair mechanism when infeasible solutions are generated.
7. Experimental Results
This section reports the experimental results obtained with the binary version of the DOA applied to the SCP. The analysis focuses on evaluating the impact of the feasibility restoration process and the adaptive selection of repair operators on solution quality and search stability. Results are presented using well known benchmark instances and are compared against established metaheuristic approaches to provide an objective and reproducible assessment.
7.1. Methodology
The experimental study was conducted using the solver described in Algorithm 4 and a set of classical SCP benchmark instances from the OR-Library, originally introduced by Beasley. The characteristics of these instances are summarized in Table 5 and include the sets 4, 5, 6, A, B, C, D, NRE, NRF, NRG, and NRH, which cover a wide range of problem sizes, coverage densities, and cost structures.
For each instance and experimental configuration, 31 independent runs were performed. In all experiments, a fixed maximum number of iterations was adopted as the stopping criterion, ensuring a homogeneous computational budget in terms of fitness evaluations for all compared configurations.
Performance was evaluated using quality and stability indicators commonly reported in the SCP literature, including best and median solution cost, relative percentage deviation (RPD) with respect to known optima, and the coefficient of variation (CV) across independent runs. To further analyze the behavior of the search process, additional indicators related to stagnation were considered, and non-parametric statistical tests were employed to support the comparative assessment.
For the study and evaluation of the metaheuristic, we relied on the evaluation metrics and methodologies used in a fairly recent study, due to their demonstrated effectiveness in providing a solid framework to ground and compare the results objectively. Including the following:
- Relative Percentage Deviation (RPD): Quantifies the quality of a solution x by comparing it to the known optimal value . Measuring the percentage difference.
- Coefficient of Variation (CV): Evaluates the stability of an algorithm’s solutions by measuring the ratio of the standard deviation to the mean , a lower CV means less variation.
Lastly, the results were put into a statistical evaluation to objectively assess the overall performance of both the DOA and the metaheuristics to which we will compare. This will ultimately ensure that the data is normalized and allowed for fair and consistent comparisons.
7.2. Parameter Settings
To define the experimental parameters, a preliminary tuning phase was conducted using one representative instance from each problem family. This procedure is necessary because the performance of metaheuristics is highly sensitive to their control parameters, and an inadequate configuration can distort the comparison between algorithms or introduce artificial biases in the results. In this exploratory phase, the population size was set to 100 individuals, the maximum number of iterations to 50, and a single stochastic greedy repair operator was used within the AOS framework. The results of this phase are shown Table 6 and Table 7.
7.3. Sensitivity Analysis of the Transition Parameter α
The parameter in Equation (24) defines the transition point between the mixed exploration and exploitation phase and the pure exploitation phase. Since this parameter directly influences the search dynamics, its impact on performance was evaluated through a sensitivity analysis.
To evaluate whether the transition parameter significantly influences the performance of the proposed algorithm across different problem sizes, a sensitivity analysis was conducted on 15 SCP benchmark using 31 independent runs for each . For each configuration, the median fitness value per instance was computed (Table 8). A global comparison using the Friedman test (Table 9) yielded , indicating that no statistically significant differences exist among the tested values.
These results suggest that the proposed method is robust with respect to moderate variations in . Therefore, was retained for the main experiments, as it maintains a longer mixed exploration and exploitation phase without degrading performance.
Although achieved the best average ranking, the Friedman test indicated no statistically significant differences among the tested configurations ( ). Given the absence of significant performance differences, the selection of was motivated by methodological considerations. A higher value delays the transition to the pure exploitation phase, allowing for a longer mixed exploration–exploitation behavior, which aligns with the exploratory nature of the proposed algorithm. Since no degradation in performance was observed, was retained as a stable and conceptually consistent choice.
Finally, the configuration adopted for the experimental study was defined with the objective of achieving high-quality results. These settings are reported in the Table 10.
The experiments were executed on
Processor: AMD Ryzen AI 9 HX 370 with Radeon 890M (2.00 GHz)Installed RAM: 32.0 GB (31.1 GB usable)System type: 64-bit operating system, x64-based processor
7.4. Performance Analysis
The experimental results exhibit robust and stable performance, as can be observed in the quality zone plot [36] shown in Figure 4. Undoubtedly, the AOS mechanism used to select the repair operator significantly improves the search process by dynamically choosing the most appropriate repair strategy according to the observed behavior of the algorithm. In the following, we present the results of our experiments in the Table 11.
The experimental results indicate that our algorithm achieves a high proportion of optimal or near-optimal solutions across the evaluated instances. In particular, approximately 92.3% of the instances attained an RPD value equal to zero, while the remaining cases exhibited RPD values below one, suggesting a low deviation from the known optima. From a structural perspective, the adaptive repair selection mechanism is activated only under stagnation or feasibility violations, enabling the diversification of the search when required.
From the point of view of process structure, the AOS mechanism responsible for selecting the repair process works efficiently by adaptively activating diversified repair operators only when required by the search dynamics of the algorithm, especially in situations of stagnation or feasibility violations. The consistently low values obtained for the standard deviation and coefficient of variation further confirm the robustness and stability of the proposed approach in different cases.
The Figure 4 graph allows simultaneous evaluation of quality (RPD%) and robustness (CV%). In our case, with RPD = 1.0% and CV = 2.5%, the vast majority of results are located in the green region (low RPD, low CV), with 57 out of 60 points located in this quadrant, which shows consistent and stable behavior in most instances. Only three cases are outside this range: nrf3 and nrf4 show high variability (CV ≈ 3.50% and 2.64%, respectively), while nrg4 corresponds to a case of quality degradation (RPD ≈ 1.79%), indicating specific instances where the method is more sensitive and which, therefore, are natural candidates for specific analysis and adjustment.
7.5. General Analysis Repair Strategies Method
This subsection reports the performance indicators associated with the repair operators used in the proposed SCP solver. The analysis is based on the activation frequency, cumulative and average reward, mean fitness improvement (mean delta), and success rate of each operator. These metrics are not intended to evaluate the repair operators as standalone optimization methods, but rather to quantify their contribution within the adaptive selection mechanism.
By analyzing how often each operator is selected and how its activations are associated with changes in solution quality, this subsection provides a quantitative description of the behavior of the adaptive repair mechanism during the search process. Table 3 summarizes the repair strategies considered in this study, while Table 12 defines the metrics and notation used to characterize the behavior of the repair operators, and Table 13 reports the per-instance operator statistics.
The activation patterns observed (Table 13) in repair operators are consistent with the quality indicators obtained from the experimental results, especially concerning the occurrence of solutions with zero RPD. The predominance of complex stochastic repair, which accounts for 18,088 activations (46.4% of the total), coincides with a higher incidence of executions reaching an RPD = 0, indicating that this operator frequently participates in trajectories that reach known optimal solutions or best known solutions. Complex penalized repair, despite being activated 11,090 times (28.4%), is mainly associated with stable but less transformative search behavior, which limits its contribution to obtaining . The complex stochastic operator, with 9851 activations (25.2%), shows intermediate behavior, favoring occasional improvements but with less impact on the frequency of RPD = 0 results. The basic complex repair operator was never activated by the adaptive mechanism, indicating that it consistently received the lowest expected reward among all strategies.
The Figure 5 representation highlights both the quality and robustness of the process architecture. The boxes are concentrated near RPD = 0 and show a very small interquartile range, demonstrating that executions consistently achieve high quality solutions with low dispersion. The small size of the boxes reflects stable behavior in independent executions, while the limited presence of outliers suggests that deviations from optimization are infrequent. Table 14 presents the global performance comparison of the evaluated algorithms.
The instance scp41 is selected as a representative case study, as it corresponds to a non-trivial scenario where the optimal solution is not consistently reached, allowing a meaningful analysis of the search dynamics and the contribution of repair operators. The localized fluctuations observed in the XPL and XPT into Figure 6 curves correspond to controlled diversification events triggered by stagnation or low improvement phases. The rapid recovery of exploitation dominance after these events indicates that exploratory interventions are effectively absorbed by the search process, preserving stability while enabling escape from local optima. The Figure 7 illustrate a predominantly exploitation driven search process, characterized by rapid convergence and limited exploratory activity, highlighting the baseline behavior of the algorithm when repair diversification is not employed.
7.6. Comparative Analysis
BDOA was evaluated alongside a set of highly regarded metaheuristics in the field of combinatorial optimization: SCA [38], PSA [39], GWO [40], and BGO [13]. The main features that make them attractive are: SCA is characterized by a lightweight formulation and a balanced exploration exploitation mechanism; PSA follows a physics-inspired search paradigm and has demonstrated competitive performance in discrete optimization contexts; GWO is a widely adopted approach in binary search spaces with stable convergence behavior; and BGO represents a more recent binary oriented variant designed to improve solution quality in discrete domains. All algorithms are evaluated using the best solution cost obtained in reference SCP instances, ensuring a consistent and reproducible evaluation framework. The experimental results have been extracted from previously published data and are summarized in Table 15. The results for SCA, PSA, GWO, and BGO were obtained from experiments alternating combinations of DS and with a fixed repair operator.
The results shown in Table 13 provide clear evidence of DOA’s superior performance in the 45 SCP instances. DOA achieves the lowest average minimum RPD (0.02), indicating near optimal solution quality on average, and obtains the best result in 42 of the 45 instances. This dominance is reinforced by an average ranking of 1.00, confirming that DOA consistently outperforms competing metaheuristics across the benchmark. A boxplot representation of RPD values is included to visualize the distribution, robustness, and variability of each metaheuristic across instances; see Figure 8.
In addition, a normality analysis was conducted on the 31 independent executions of DOA for each SCP instance. The results reveal a predominantly non-Gaussian behavior of the performance distributions, supporting the use of median-based indicators and interquartile ranges to characterize robustness. This analysis is intended solely to describe the internal performance distribution of DOA and does not constitute a statistical comparison with competing algorithms. The results are in Table 16 and Table 17.
7.7. Statistical Analysis
The Table 18 presents the results of the Wilcoxon signed-rank test applied to the RPD values obtained across all instances of the SCP, comparing the DOA algorithm against each reference metaheuristic.
The comparison column indicates the pairwise comparison performed between DOA and each competing algorithm (AOA, SCA, PSA, GWO, and BGO). Each comparison is carried out on an instance by instance basis using the corresponding RPD values.
The wins column represents the number of instances in which DOA achieved a lower RPD than the compared algorithm. The ties column indicates the number of instances in which both algorithms achieved exactly the same RPD value, meaning equivalent performance. The losses column shows the number of instances in which DOA obtained a higher RPD than the compared algorithm. Finally, the p-value column corresponds to the statistical significance value obtained from the Wilcoxon test. This value tests whether the median difference between the two algorithms is zero. Since all p-values are below = 0.05, the differences are statistically significant, indicating that DOA performs significantly better than all compared metaheuristics.
The obtained Wilcoxon test results (p-values on the order of ) indicate that the observed differences between DOA and each of the compared metaheuristics are not due to random variation. Since all p-values are significantly below the significance level , the null hypothesis is rejected in every case. Furthermore, the wins–ties–losses analysis reinforces this evidence: DOA presents no losses against any algorithm and exhibits a dominant number of wins across the evaluated instances.
Overall, these results allow us to conclude that DOA demonstrates statistically significant, consistent, and robust superior performance over the complete set of considered SCP instances.
Finally, Table 19 presents the average ranking results together with the corresponding effect size analysis based on Cliff’s delta. The average rank column reports the mean rank obtained by each algorithm across all evaluated SCP instances, where lower values indicate better overall performance. As observed, DOA achieves the lowest average rank, confirming its consistent superiority across the benchmark set.
To complement the ranking analysis, Cliff’s delta was computed between DOA and each competing metaheuristic in order to quantify the magnitude of the performance differences. All reported effect sizes are above 0.80, which corresponds to a very large effect according to established interpretation thresholds. This indicates that the superiority of DOA is not only reflected in its ranking position but is also substantial in practical terms. Together, these results provide robust statistical evidence supporting the dominance of DOA over the compared algorithms.
8. Novelty and Contributions
The main contribution of this work is the incorporation of a complementary learning assisted repair mechanism within the DOA to address the SCP. Rather than modifying the core search dynamics of the metaheuristic, the proposed mechanism operates as an auxiliary decision support component that actively guides candidate solutions toward feasible and high quality regions of the search space. The experimental results show that this hybrid framework is able to consistently reach known optimal solutions across multiple SCP instances, indicating a clear improvement in solution refinement capabilities when compared to the standalone behavior typically observed in discretization-based approaches.
A distinctive aspect of the proposed methodology is that the learning-based repair component is architecturally decoupled from DOA. The mechanism is not designed as a problem specific or algorithm specific operator, but rather as a modular and portable tool that can be integrated into other metaheuristics employing binary representations or repair-based feasibility restoration. This design choice enables the reuse of the proposed architecture in different optimization frameworks, supporting its applicability beyond the specific case of DOA and SCP.
From a methodological perspective, the proposed framework was evaluated through 31 independent executions per instance, allowing a rigorous characterization of robustness and consistency. The observed convergence to optimal solutions, together with the non-Gaussian and highly concentrated performance distributions, supports the role of the complementary repair mechanism as an effective enhancer of solution quality without increasing the algorithmic complexity of the underlying metaheuristic.
Overall, this work contributes a portable and extensible hybrid optimization architecture in which a lightweight learning assisted repair mechanism complements a metaheuristic search process, improving its ability to reach high quality and optimal solutions in combinatorial optimization problems.
Finally, the adaptive repair selection mechanism evaluated in this study can be viewed as a general decision component that can be integrated into other coverage-based optimization problems beyond the Set Covering Problem.
9. Conclusions
This paper addressed the SCP using an adapted version of the DOA, complemented by a learning assisted repair mechanism. The proposal does not alter the fundamental logic of the metaheuristic but introduces an auxiliary component that intervenes during the repair process with the aim of improving the feasibility and quality of the solutions generated. This approach allowed the original structure of the algorithm to be maintained, while reinforcing its ability to perform in a discrete and highly restricted search space.
The results obtained show that the proposed scheme is capable of repeatedly achieving known optimal solutions in a wide range of SCP instances. This consistent convergence, observed across multiple independent runs, highlights the usefulness of the repair mechanism in supporting the search process, facilitating the transition of candidate solutions to high quality feasible regions. Likewise, analysis of the internal behavior of the algorithm reveals stable dynamics, characterized by low dispersion of results and a marked concentration around optimal solutions, which reinforces the reliability of the approach adopted.
The descriptive comparison with other widely used metaheuristics indicates that DOA performs competitively in terms of solution quality on the benchmarks considered. Although no inferential statistical comparisons between algorithms were performed due to the limited availability of independent runs for the comparative methods, the analysis presented offers a clear and methodologically consistent view of the relative positioning of the proposed approach. Overall, the results suggest that combining DOA with a learning assisted repair mechanism is an effective and flexible alternative for solving combinatorial optimization problems.
10. Future Works
The results obtained in this study generate several possibilities for further study and can be addressed in subsequent research. Mainly, it is pertinent to examine in greater detail the specific contribution of the learning assisted repair mechanism through comparisons made under strictly equivalent algorithmic configurations. This point is important because it generates a line of research to test new repair operators and, on the other hand, to seek other learning mechanisms.
On the other hand, the proposed architecture was designed without a rigid coupling to DOA, which facilitates its incorporation into other metaheuristic schemes aimed at binary or combinatorial optimization. Exploring its integration into different algorithms would allow evaluating its degree of generality and determining whether the benefits observed in this work are maintained in different algorithmic contexts.
Finally, it would be interesting to extend the evaluation to larger instances or those with characteristics closer to real applications, where the constraints and scale of the problem impose additional challenges on the search process and the time cost of the process. Such scenarios would allow for a more accurate assessment of the practical scope of the proposed approach and delimit its possible limitations.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Hasan D.O. Aladdin A. Real-World Applications of Metaheuristic Algorithms: A Comprehensive Review of the State-of-the-Art Diyala J. Eng. Sci.20241812710.24237/djes.2024.18201 · doi ↗
- 2Garey M.R. Johnson D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness W. H. Freeman New York, NY, USA 1979
- 3Sharma V. Tripathi A.K. A systematic review of meta-heuristic algorithms in Io T based application Array 20221410016410.1016/j.array.2022.100164 · doi ↗
- 4Zhu J. Zheng Y. Robustness analysis of smart manufacturing information systems Soft Comput.2024287875789210.1007/S 00500-024-09735-7 · doi ↗
- 5Lang Y. Gao Y. Dream Optimization Algorithm (DOA): A novel metaheuristic optimization algorithm inspired by human dreams and its applications to real-world engineering problems Comput. Methods Appl. Mech. Eng.202543611771810.1016/j.cma.2024.117718 · doi ↗
- 6Crawford B. Soto R. Astorga G. García J. Castro C. Paredes F. Putting Continuous Metaheuristics to Work in Binary Search Spaces Complexity 20172017840423110.1155/2017/8404231 · doi ↗
- 7Becerra-Rozas M. Lemus-Romani J. Cisternas-Cañeo F. Crawford B. Soto R. Continuous Metaheuristics for Binary Optimization Problems: An Updated Systematic Literature Review Mathematics 20221112910.3390/math 11010129 · doi ↗
- 8Gangan E. KovačevićM. Ilyushin E. Survey of multiarmed bandit algorithms applied to recommendation systems Int. J. Open Inf. Technol.202191227