Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation
Ibrahim Muhammed, Ayman A. Nada, Haitham El-Hussieny

TL;DR
This paper validates a decentralized control system for two robots working together to transport objects in real-time, even in complex environments.
Contribution
The paper introduces a decentralized MPC framework with adaptive weighting for real-time multi-robot cooperative transport.
Findings
The framework achieves accurate trajectory tracking and constraint satisfaction in various scenarios.
It demonstrates robustness to environmental uncertainties and dynamic obstacles.
The system scales well for cooperative transport tasks with arbitrary reference paths.
Abstract
This paper presents an experimental validation of a decentralized Model Predictive Control (MPC) framework for cooperative object transportation utilizing a multi-robot system consisting of two mobile robots. Each robot is a differential-drive robot that independently solves local constrained optimization problems while ensuring global coordination through joint-space coupling. The formulation explicitly captures nonlinear kinematics, revolute-prismatic joint dynamics, inter-robot constraints, and dynamic obstacle avoidance within a real-time optimization setting. Adaptive weighting of cost terms is employed to balance trajectory tracking and formation objectives under varying task demands. The framework is deployed on a physical testbed integrating vision-based pose estimation, sensor fusion via a Kalman filter, and a ROS 2 control infrastructure. Experiments across point-to-point,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
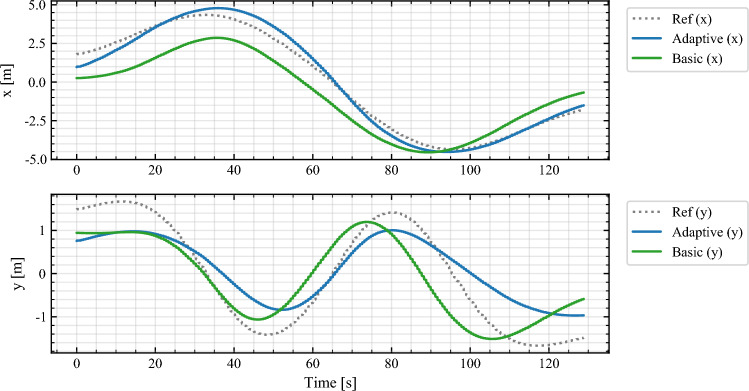 Figure 10
Figure 10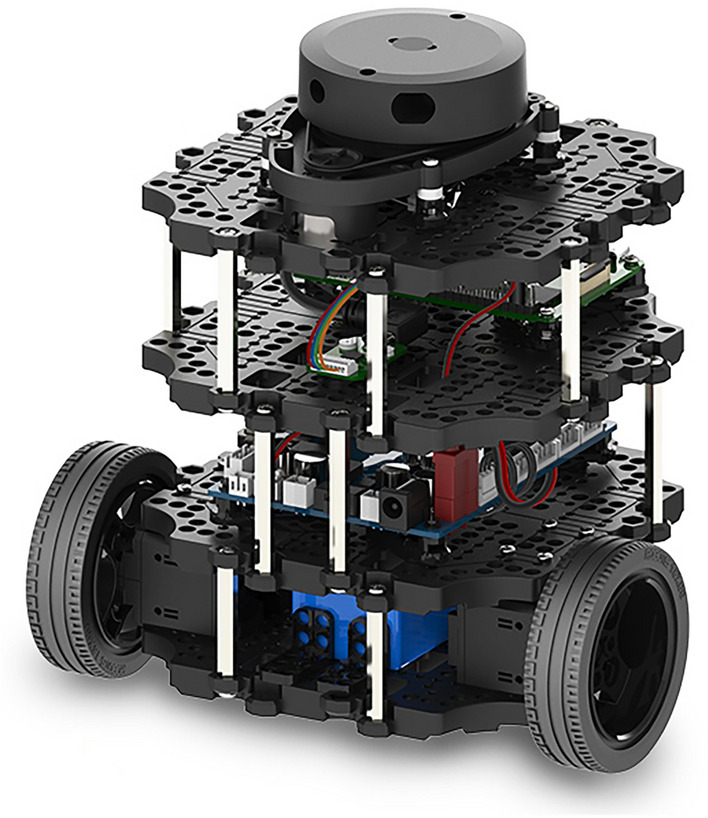 Figure 1
Figure 1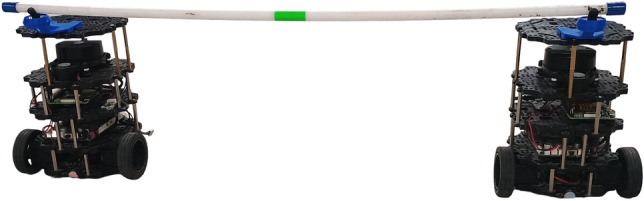 Figure 2
Figure 2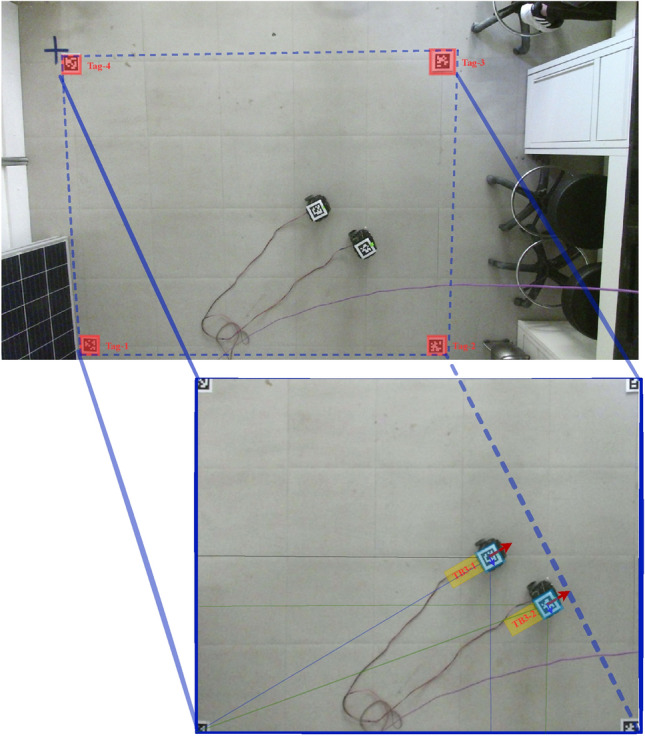 Figure 3
Figure 3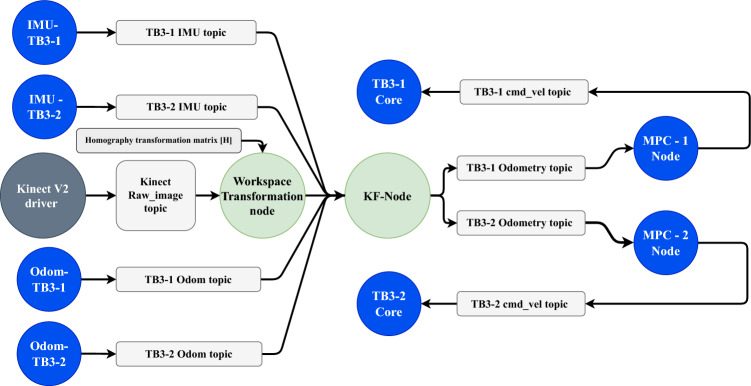 Figure 4
Figure 4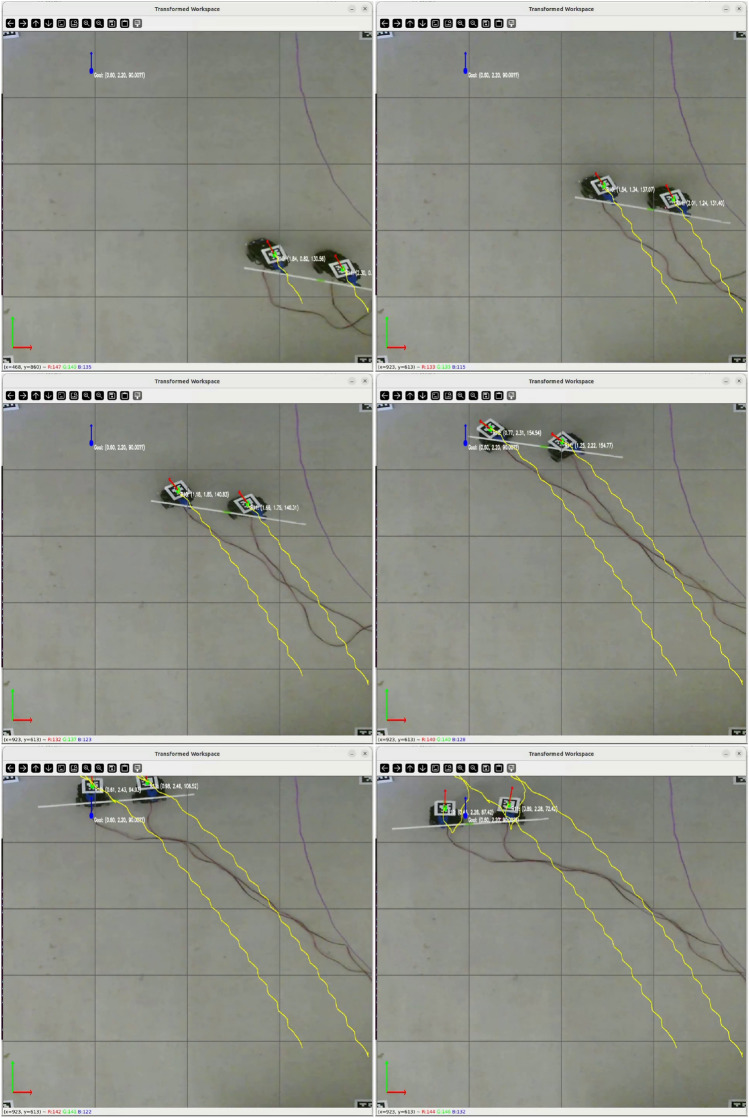 Figure 5
Figure 5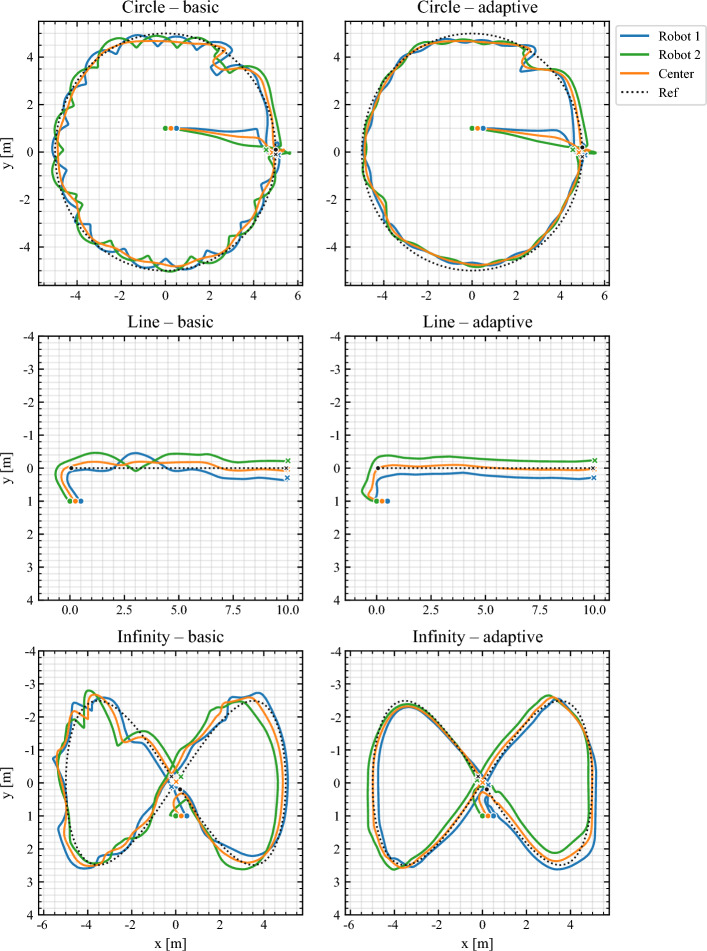 Figure 6
Figure 6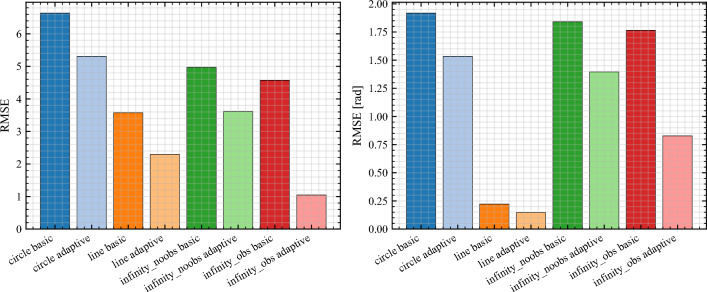 Figure 7
Figure 7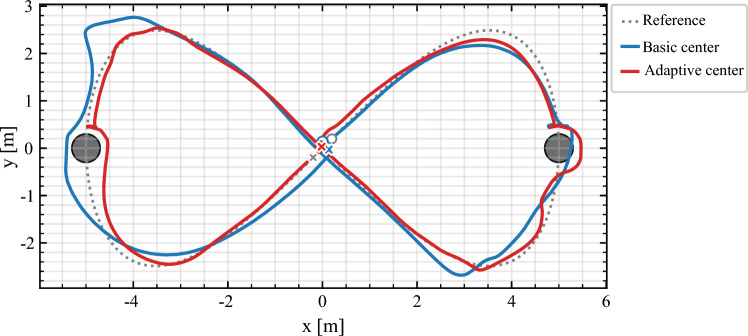 Figure 8
Figure 8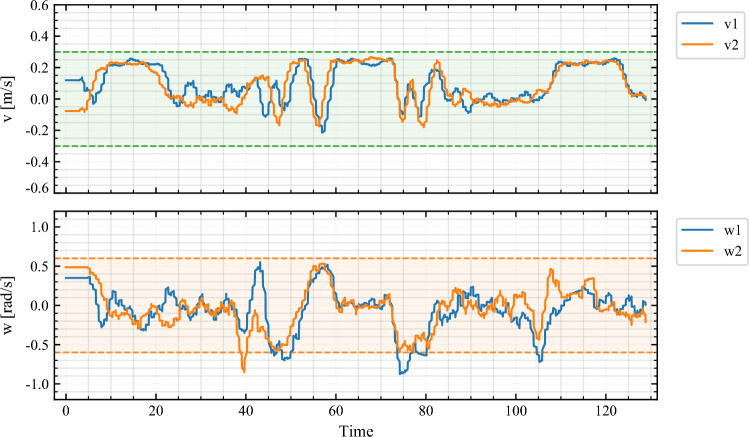 Figure 9
Figure 9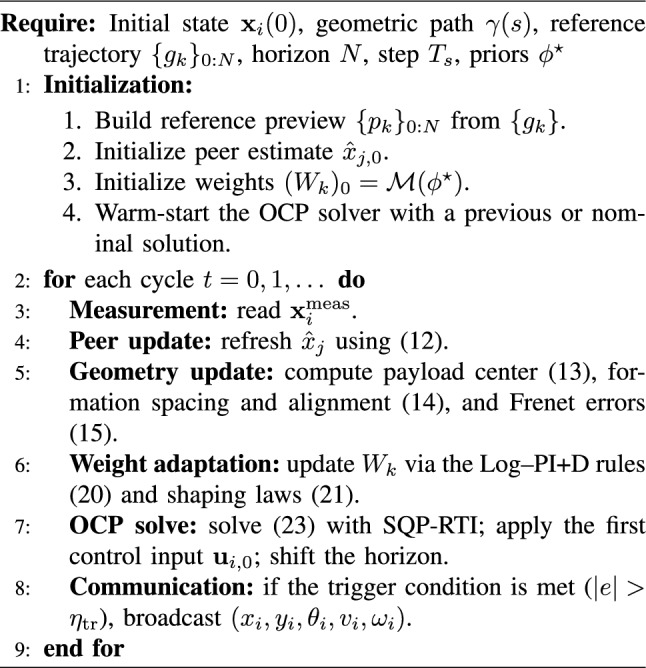 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Control Systems Optimization · Distributed Control Multi-Agent Systems · Control and Dynamics of Mobile Robots