Model predictive game control for personalized and targeted interactive assistance
Abdelwaheb Hafs, Anaïs Farr, Dorian Verdel, Olivier Bruneau, Etienne Burdet, Bastien Berret

TL;DR
A new game-theoretic controller for contact robots improves human-robot interaction by predicting and adapting to human movements.
Contribution
The novel model-predictive game controller enables optimal human-robot co-adaptation by predicting human motor control.
Findings
MPG interaction remains stable while reducing human effort.
The robot adapts to humans by identifying individual interaction behaviors.
Humans adapt to the robot's assistance meta-parameter.
Abstract
Contact robots are increasingly used to assist humans in physical training and manufacturing tasks. However, their effectiveness is currently limited as control methods focus on system performance without considering the upcoming human user’s control. Here, we present a differential game-based controller for contact robots ensuring optimal interaction by predicting human motor control over their finite planning horizon. Using this model-predictive game (MPG) controller, we investigated human-robot co-adaptation in experiments, demonstrating that: (a) MPG interaction remains stable while reducing human effort; (b) the robot adapts to humans, identifying time-consistent individual interaction behaviors; (c) humans adapt to the robot, and their behavior can be modulated through an assistance meta-parameter adjusting the robot’s propensity to minimize human effort. These findings indicate…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
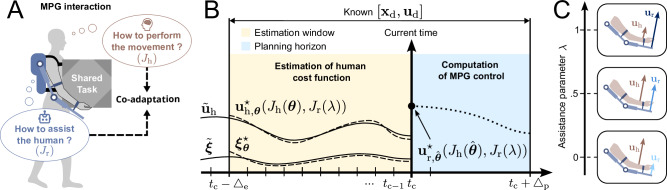 Figure 1
Figure 1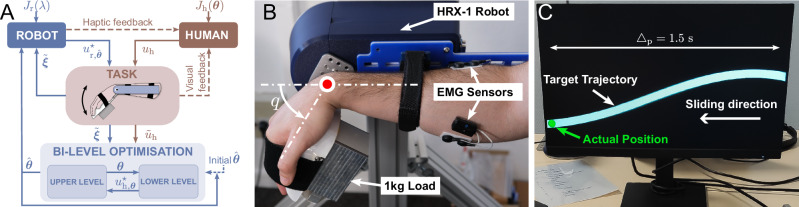 Figure 2
Figure 2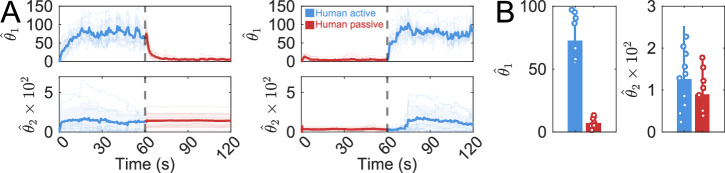 Figure 3
Figure 3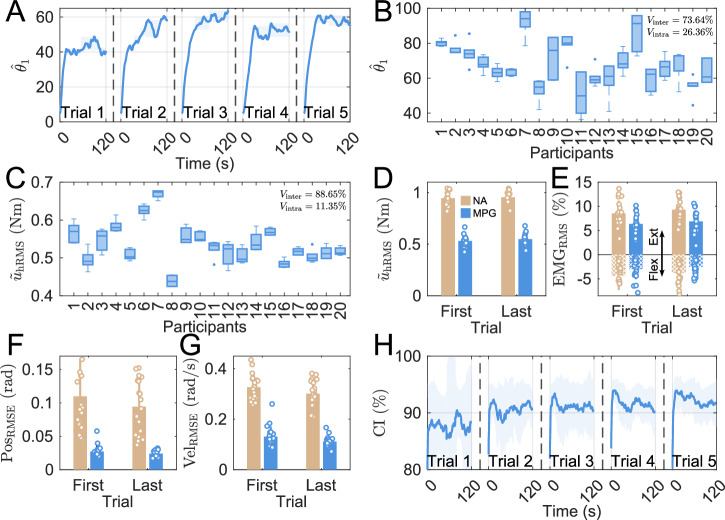 Figure 4
Figure 4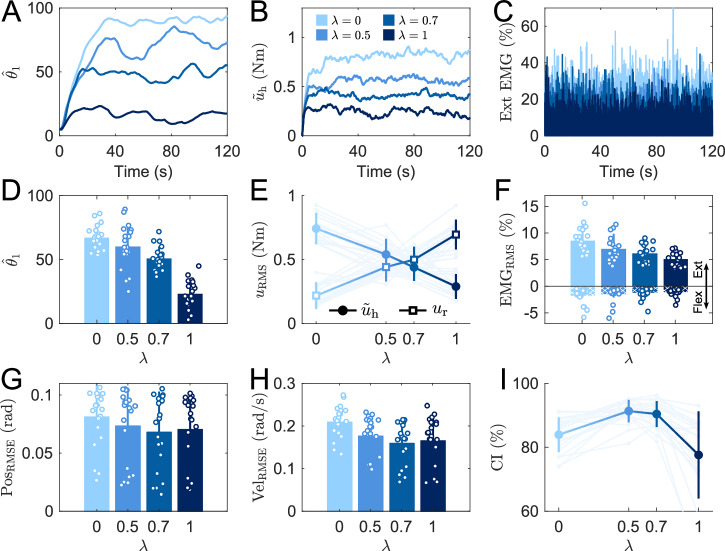 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Motor Control and Adaptation · Social Robot Interaction and HRI