Stereotypical force patterns of the elephant trunk in planar reaching movements
Camilla Agabiti, Enrico Donato, Elisa Setti, Paule Dagenais, Michel C. Milinkovitch, Cecilia Laschi, Angelo Maria Sabatini, Barbara Mazzolai, Egidio Falotico

TL;DR
Researchers developed a model to understand how elephant trunks move by linking trunk shape to internal forces, enabling insights into their dexterous motion.
Contribution
The study introduces linear laws that map trunk shape to muscle-analogue forces in a rod-based model, simplifying complex trunk dynamics.
Findings
The model predicts reaching trajectories with tip-position errors below 8%.
Force-shape mappings reveal consistent internal force patterns for specific trunk postures.
The framework reduces high-dimensional dynamics to simple linear relationships for muscle-force inference.
Abstract
The elephant trunk is a highly dexterous muscular hydrostat whose continuous, distributed deformations pose significant challenges for mathematical modeling. We introduce linear “stereotypical” laws that map desired trunk configurations, parameterized by curvature and length, directly to the internal muscle-analogue forces required in our rod-based dynamic model. The trunk is represented as a simplified multi-segment structure of point masses linked through longitudinal and radial muscle analogues and connective tissue, all modeled using rods. Using these laws, the model predicts biological reaching trajectories with tip-position errors below 8% while maintaining hydrostatic volume across trials. The resulting force-shape mappings reveal consistent, repeatable internal force patterns underlying trunk postures, providing a compact representation of actuation strategies that generate…
Click any figure to enlarge with its caption.
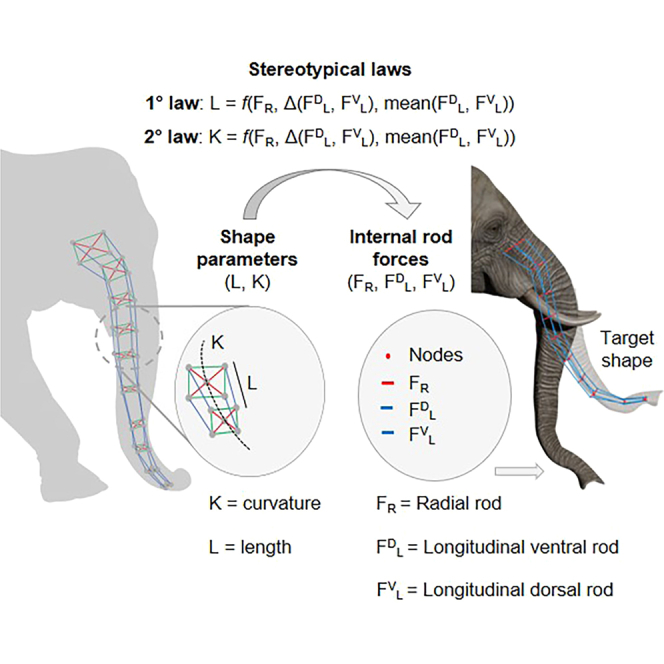 Figure 1
Figure 1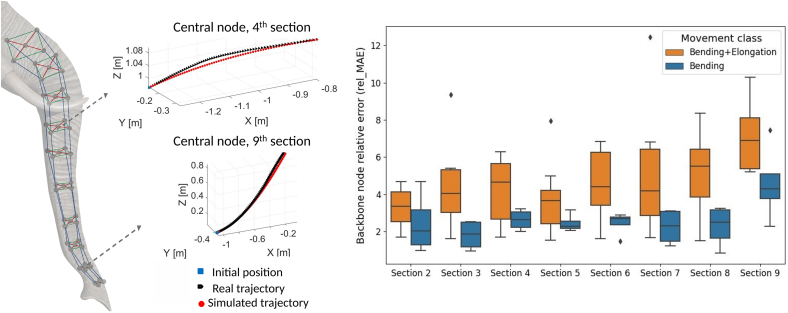 Figure 2
Figure 2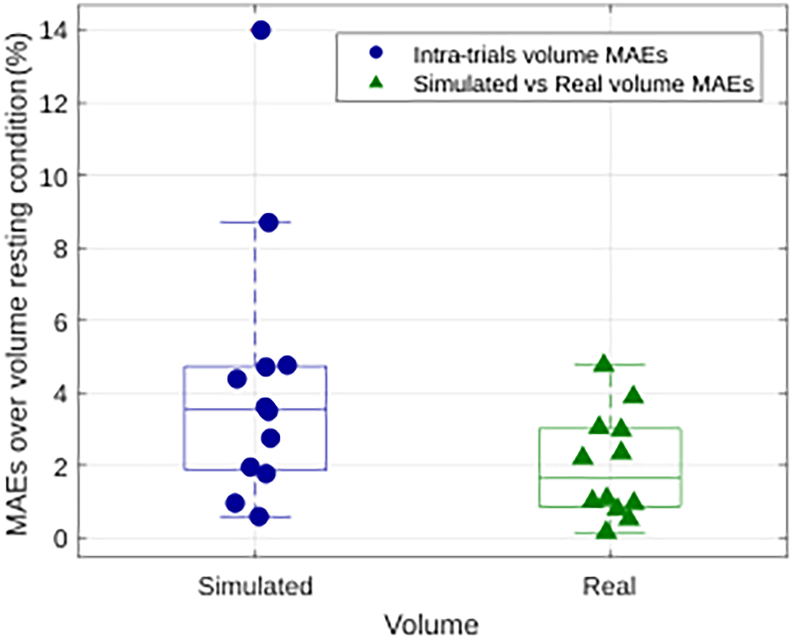 Figure 3
Figure 3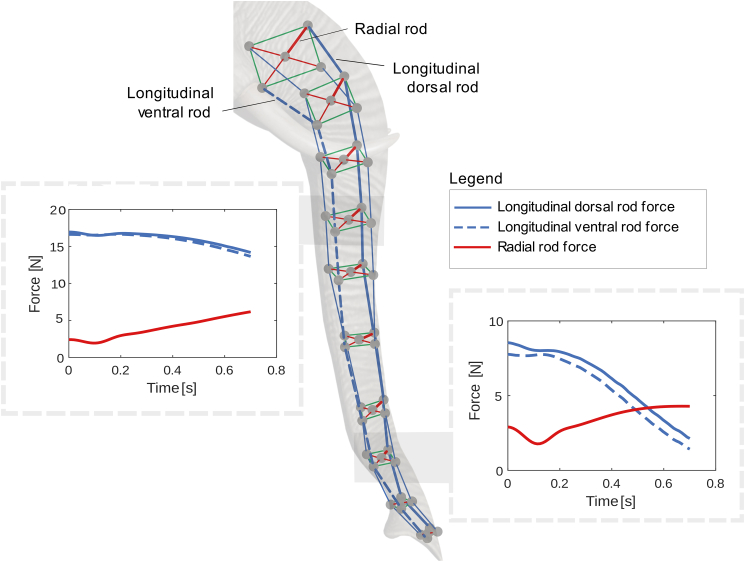 Figure 4
Figure 4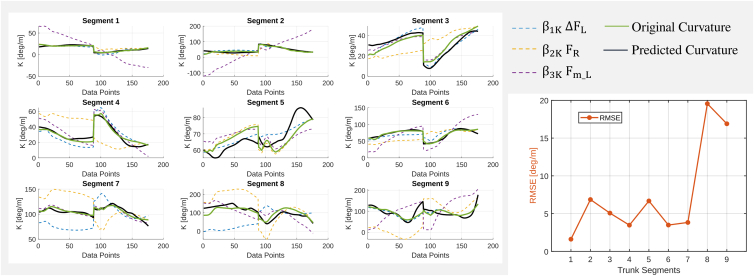 Figure 5
Figure 5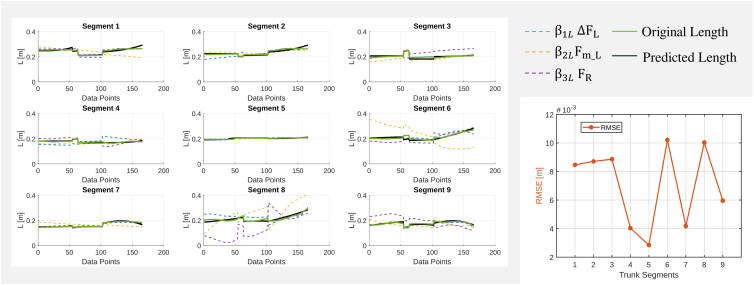 Figure 6
Figure 6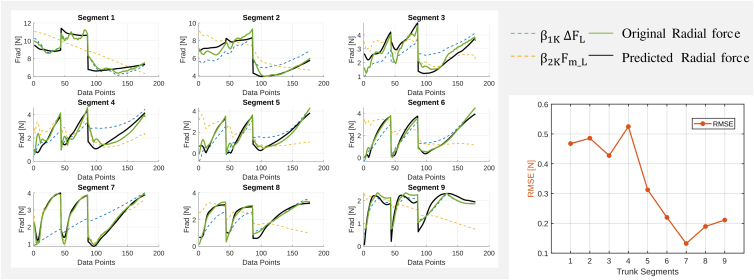 Figure 7
Figure 7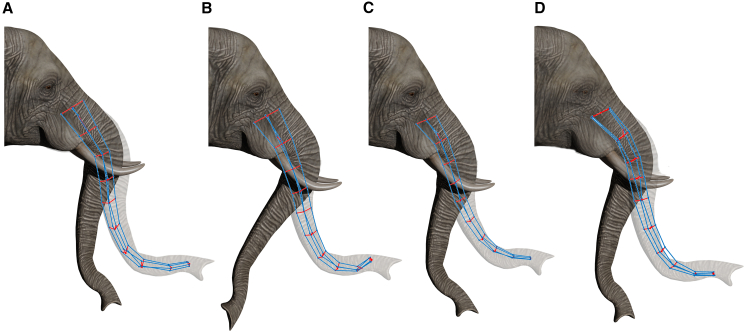 Figure 8
Figure 8 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsExperimental and Theoretical Physics Studies · Motor Control and Adaptation · Robotic Locomotion and Control