Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation
Hassan Elkholy, Rowida Meligy, A. M Bassiuny, Nader A. Mansour

TL;DR
This paper introduces a robotic system for inspecting pipes that uses advanced AI to navigate and detect objects in real time, improving pipeline inspection accuracy and safety.
Contribution
The novel integration of YOLOv8 and LSTM for real-time in-pipe navigation and object detection in varying-diameter pipes is presented.
Findings
The system achieves 97.9% mean average accuracy (mAP (0.5)) and an F1 score of 0.95 for object detection.
The LSTM model shows high accuracy in motor voltage prediction with an MSE of 0.00037 and MAE of 0.00581.
The modular robot design successfully navigates pipes with diameters from 100 to 150 mm using ROS and simulation tools.
Abstract
Conventional methods are still labor-intensive, hazardous, and have limited coverage, even though reliable pipeline inspection is crucial for oil, gas, and water distribution networks, emphasize key challenges of pipeline inspection and automated navigation. Although robotic systems have advanced with mechanisms like helical motion and multi-joint telescopic designs, the problem of obtaining dependable adaptability in curved or varying-diameter pipes has not been solved. Additionally, there are still gaps in precise navigation and predictive decision-making under complicated pipeline conditions because of the limited integration of deep learning and computer vision into real-time autonomous platforms. To provide real-time navigation and predictive analysis, this work introduces an improved In-Pipe Inspection Robotic System (IPIRs) that integrates robotic simulation and deep learning.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
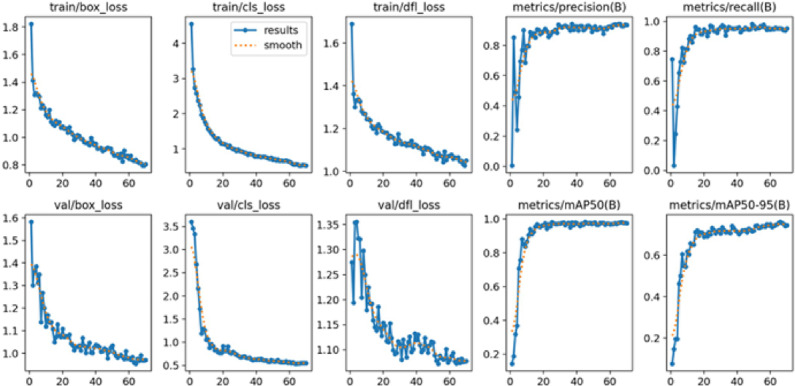 Figure 10
Figure 10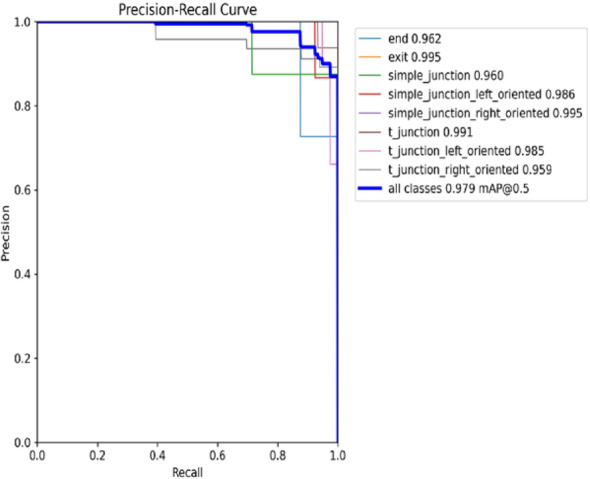 Figure 11
Figure 11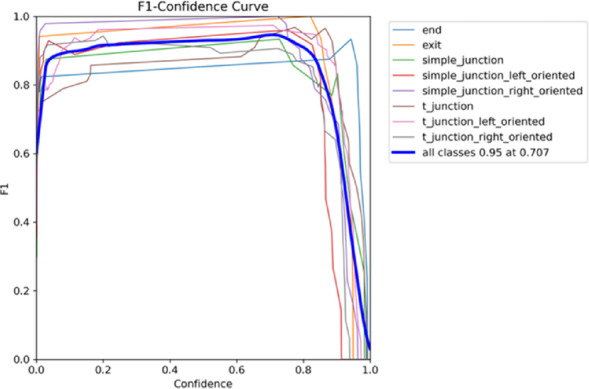 Figure 12
Figure 12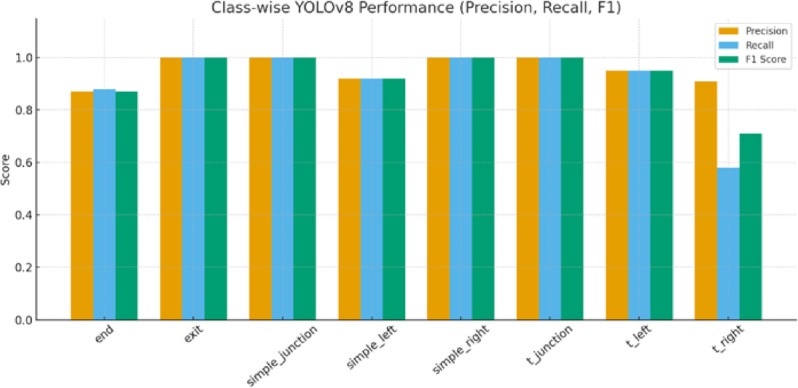 Figure 13
Figure 13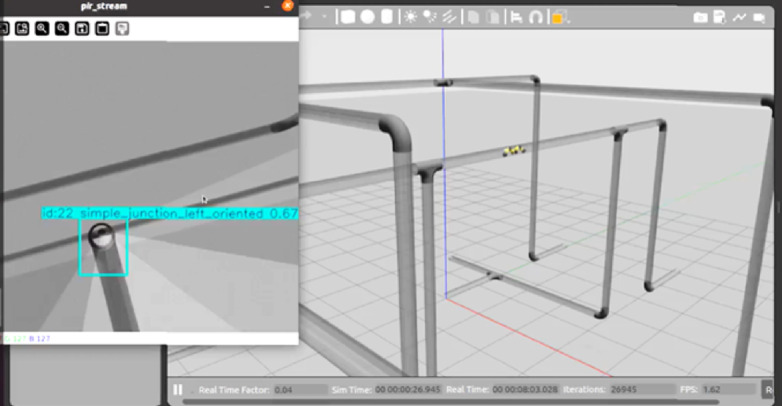 Figure 14
Figure 14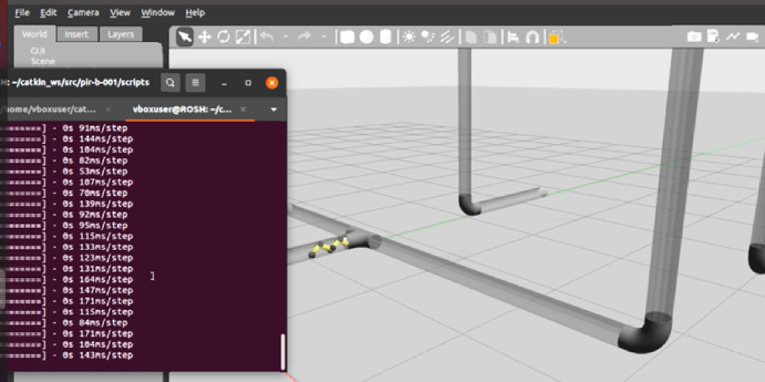 Figure 15
Figure 15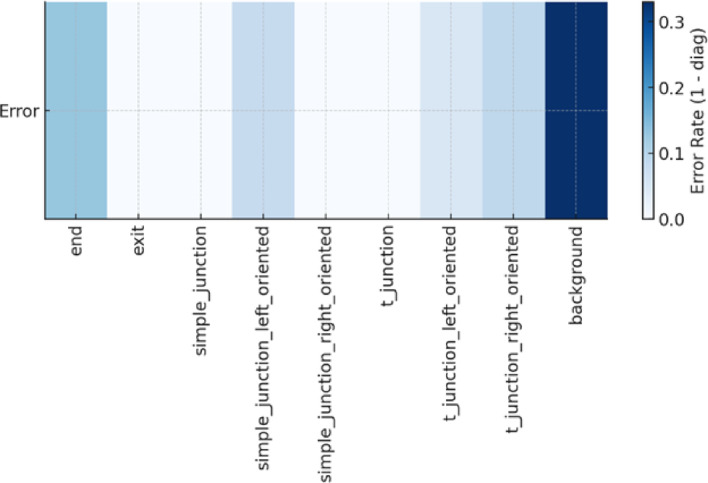 Figure 16
Figure 16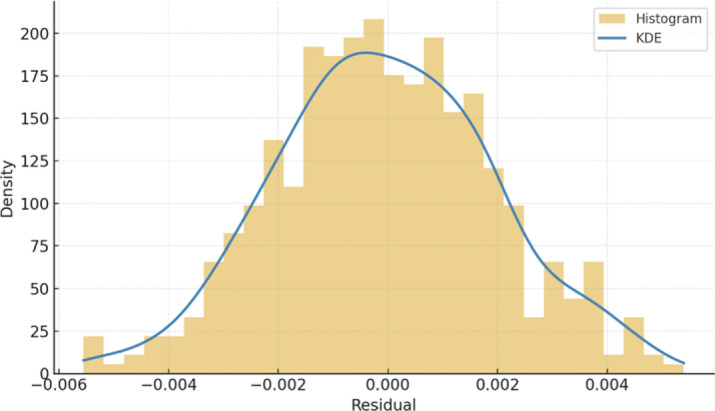 Figure 17
Figure 17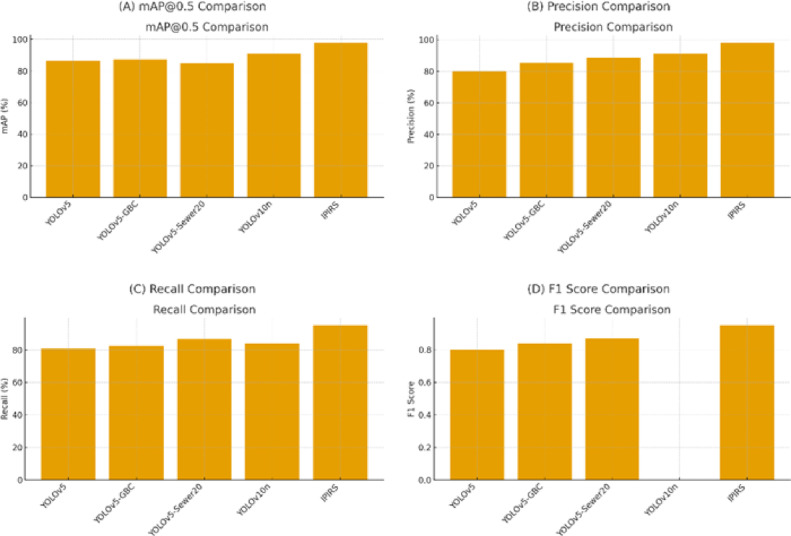 Figure 18
Figure 18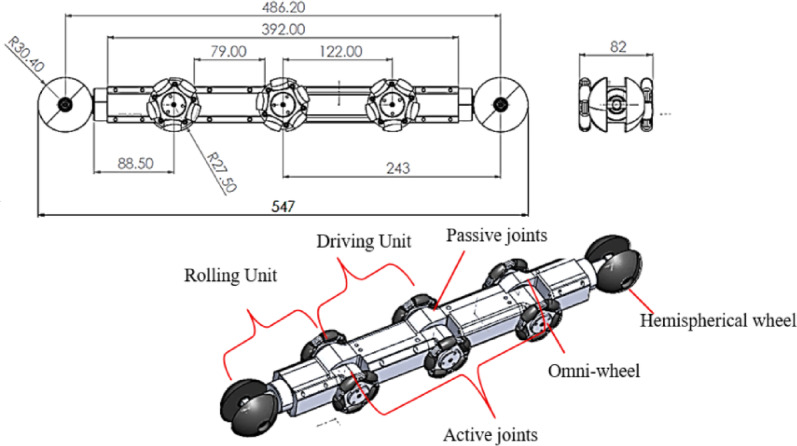 Figure 1
Figure 1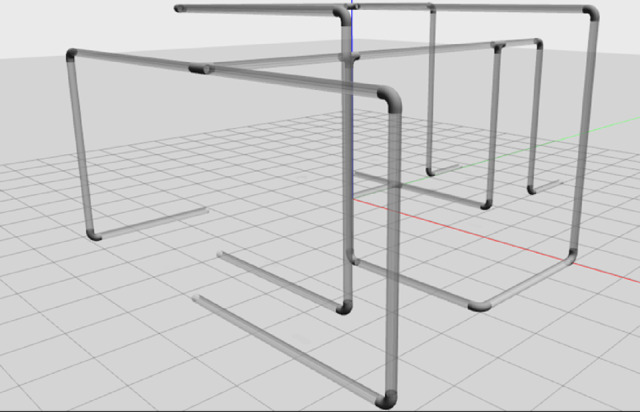 Figure 2
Figure 2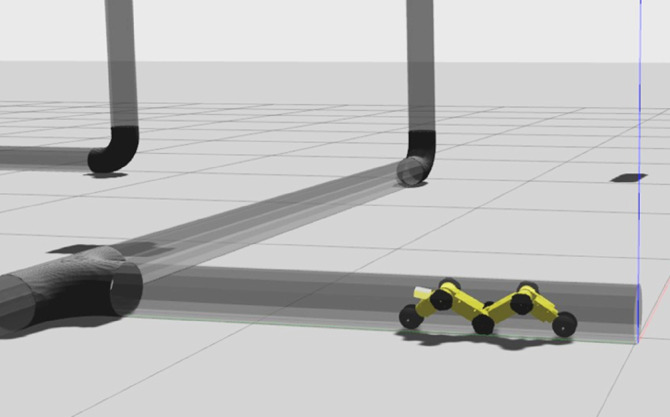 Figure 3
Figure 3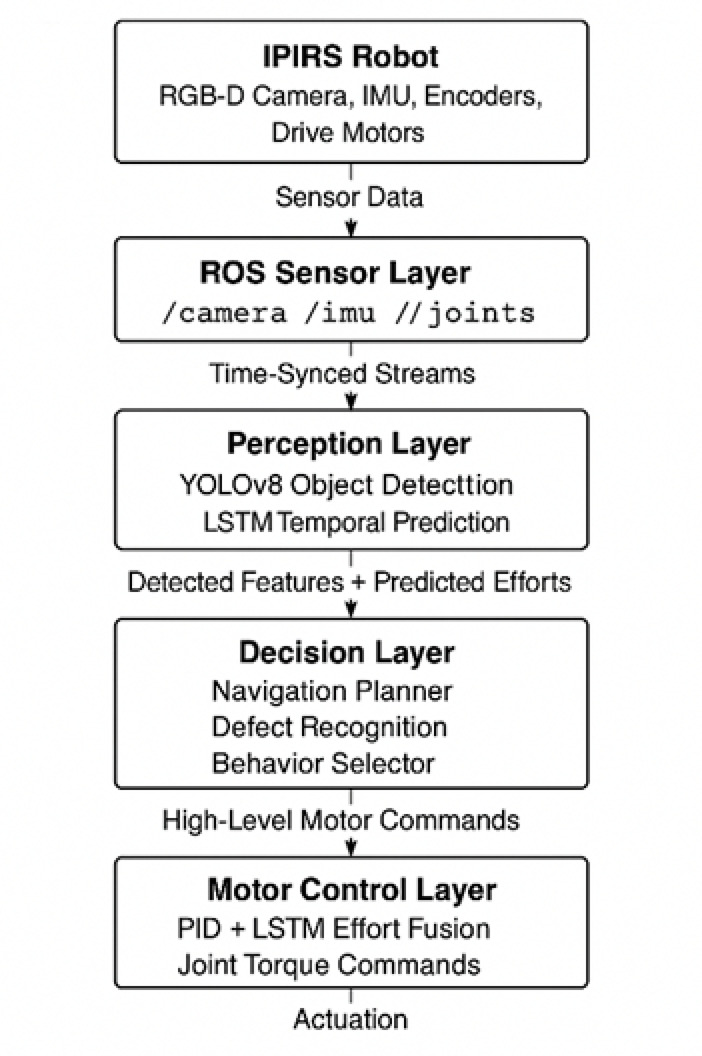 Figure 4
Figure 4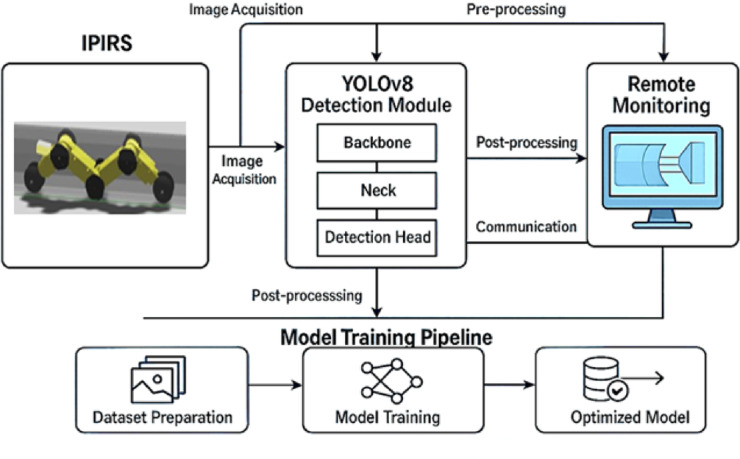 Figure 5
Figure 5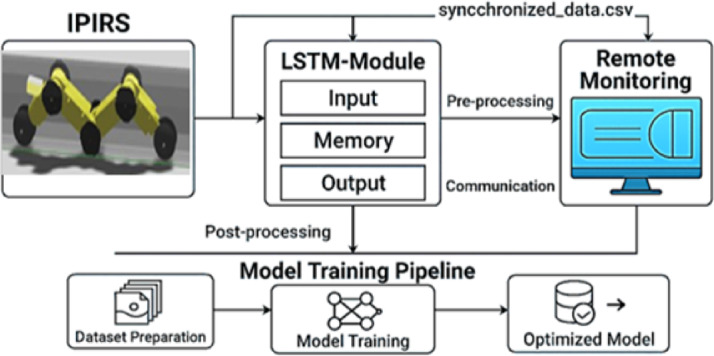 Figure 6
Figure 6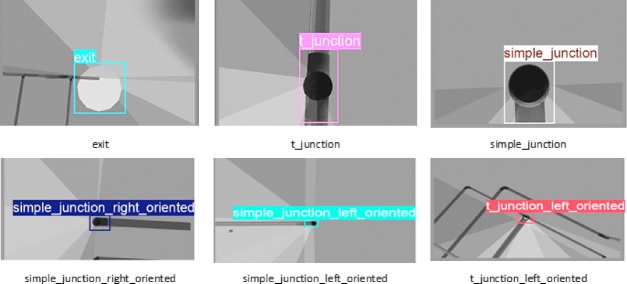 Figure 7
Figure 7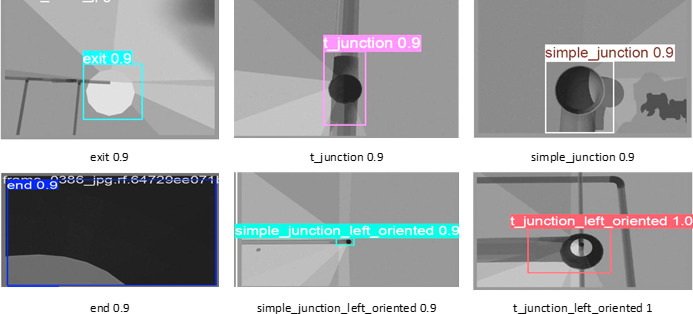 Figure 8
Figure 8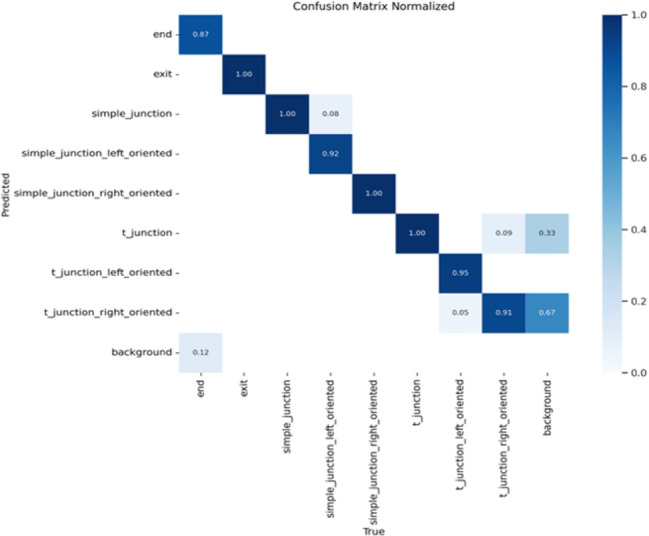 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Non-Destructive Testing Techniques · Infrastructure Maintenance and Monitoring