PMC · DOI:10.1371/journal.pone.0345474·March 19, 2026
Correction: Optimized real-time path planning for micro UAVs in dynamic environments aided by reciprocal velocity obstacle algorithm
Pengxiang Sun, Wei Sun, Wei Ding, Yadan Li, Jingang Zhao

Abstract
Figures2
Click any figure to enlarge with its caption.
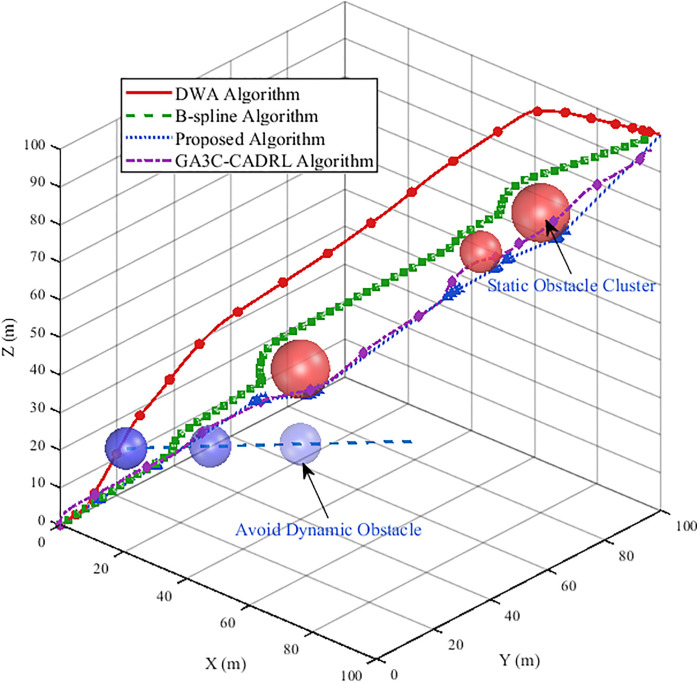 Figure 1
Figure 1 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Advanced Manufacturing and Logistics Optimization · Control and Dynamics of Mobile Robots
Full text
Bibliography1
The reference list from the paper itself. Each links out to its DOI / PubMed record.