Tools and approaches for mapping Marine Animal Forests: A practical overview for researchers and conservationists
Laurence H. De Clippele, Ricardo Aguilar, Miquel Canals, Giovanni Chimienti, Laura Martín-García, Iliyan Kotsev, Bogdan Prodanov, Dimitris Poursanidis, Beatriz Vinha, Andrea Bryndum-Buchholz, Laurence De Clippele, Saskia Rühl, Laurence De Clippele

TL;DR
This paper reviews tools and methods for mapping marine animal forests to better understand and conserve these ecosystems.
Contribution
The paper provides a practical overview and decision-support tools for selecting appropriate mapping technologies and modeling approaches for marine animal forests.
Findings
A range of mapping technologies, including sonar and underwater cameras, are used to collect data on marine animal forests.
Machine learning and advanced modeling techniques help overcome data gaps and improve spatial predictions.
Decision-support flow charts guide researchers in selecting suitable tools based on project goals and data availability.
Abstract
Mapping marine animal forests (MAFs) is essential for understanding complex benthic ecosystems and supporting their conservation and management. This review provides a comprehensive overview of the key aspects of MAFs that can be mapped, focusing on both biological and substrate (sedimentary) data. We summarise the diverse platforms and technologies used to collect relevant data, including space-based, air-based, and sea-based mapping tools. The latter include active acoustics, side-scan sonar, seismic reflection profiling, multibeam sonar, and underwater cameras. In addition, we highlight the software tools, open-source databases, and modelling approaches that enable researchers to analyse and map MAFs effectively. The modelling approaches include unsupervised mapping techniques, geomorphological classification, species distribution modelling, biomass distribution modelling, and…
Click any figure to enlarge with its caption.
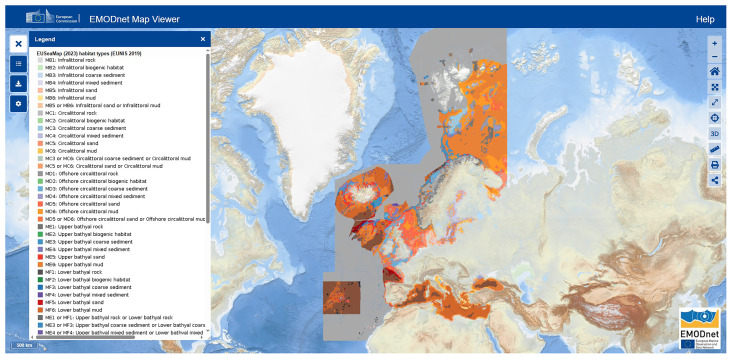 Figure 1
Figure 1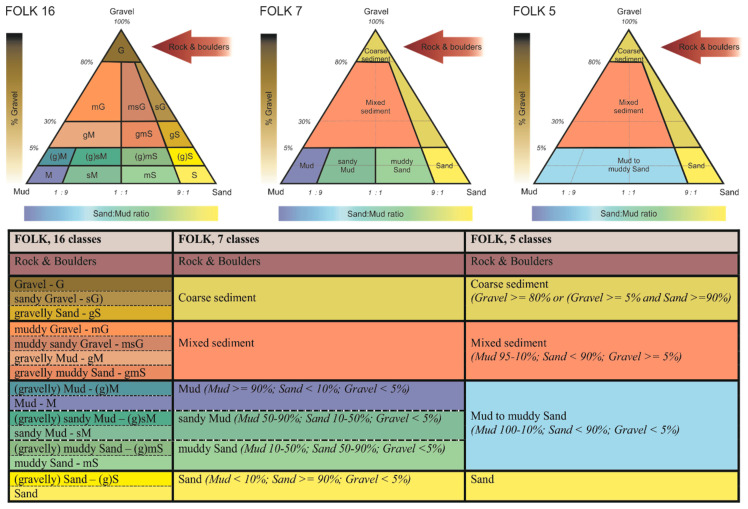 Figure 2
Figure 2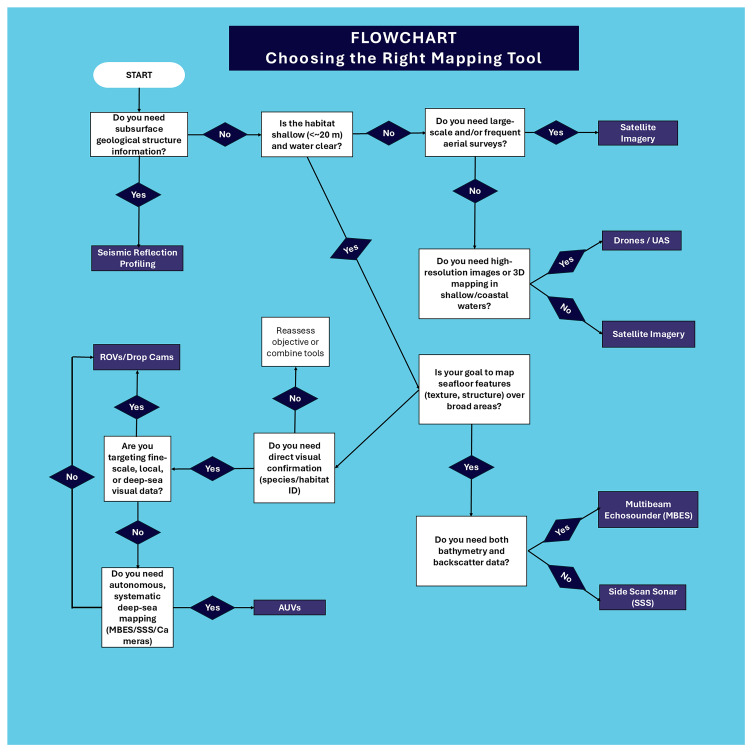 Figure 3
Figure 3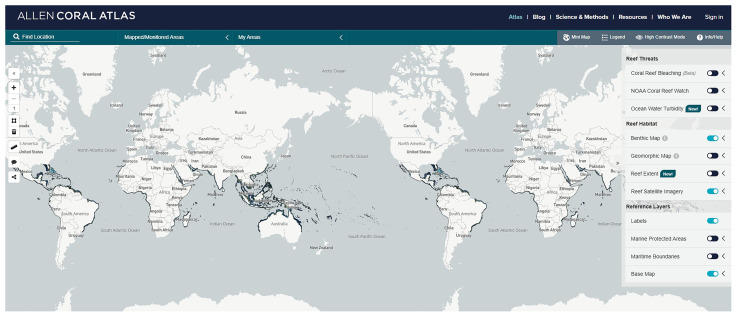 Figure 4
Figure 4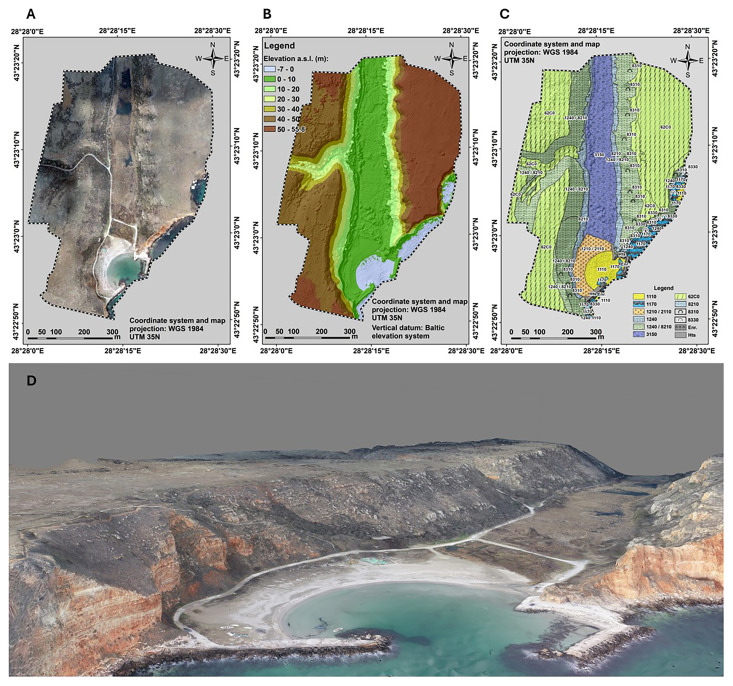 Figure 5
Figure 5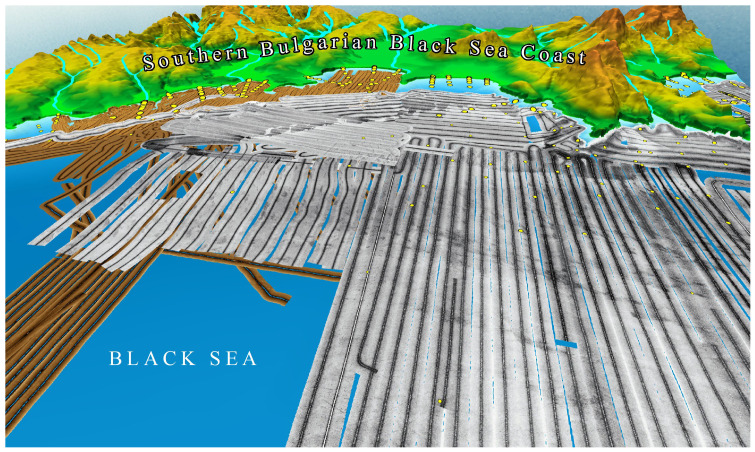 Figure 6
Figure 6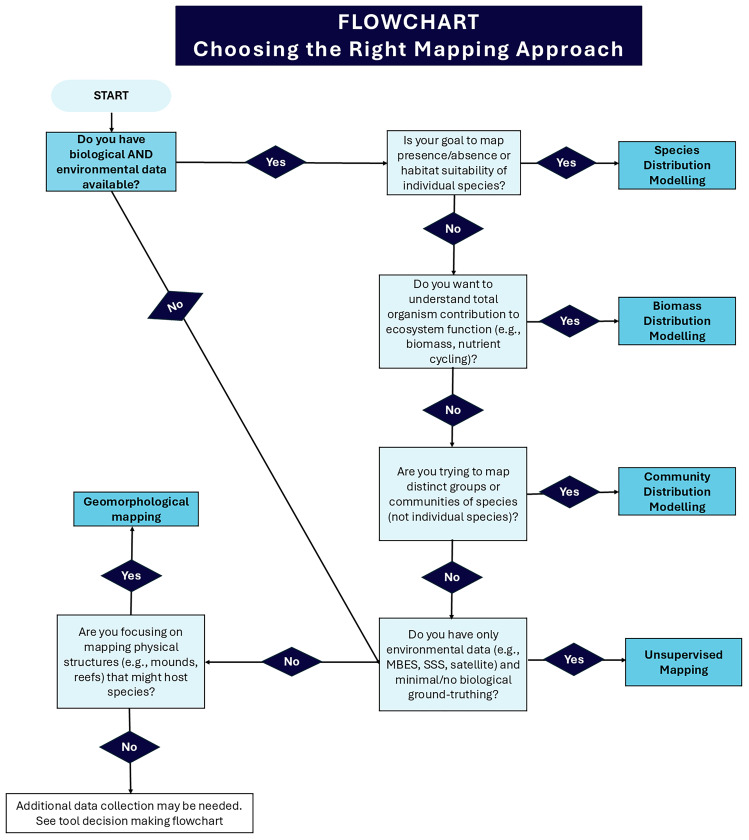 Figure 7
Figure 7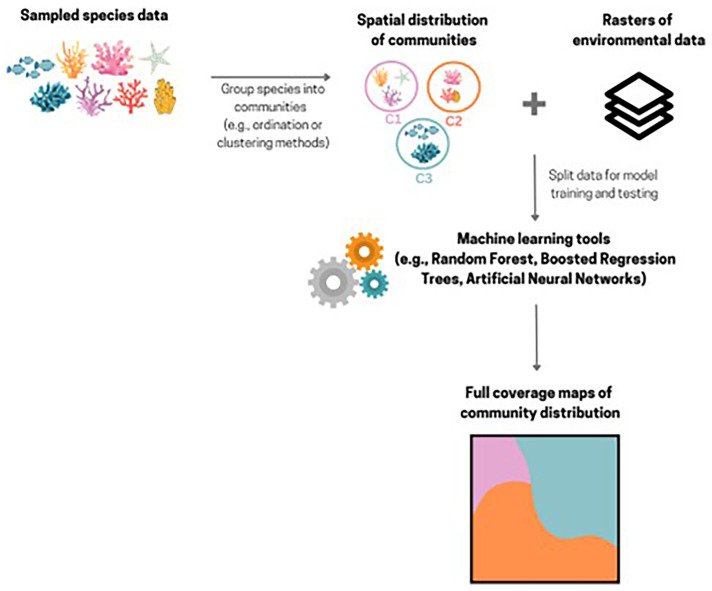 Figure 8
Figure 8| Tool | Pros | Cons | Examples |
|---|---|---|---|
| Space-based
| - Suitable for shallow habitats
| - Limited to shallow depths (up to
|
|
| Air-based
| - Suitable for shallow habitats
| - Limited to shallow depths (up to
|
|
| Side scan
| - Suitable for shallow and deep-sea
| - Can be difficult to interpret and
|
|
| Seismic
| - Suitable for shallow and deep-sea
| - Disturbing for fauna
|
|
| Multibeam
| - Suitable for shallow and deep-sea
| - Expensive equipment and operation
|
|
| Remotely
| -Suitable for remote and deep-sea
| - Limited spatial coverage
| (
|
| Autonomous
| - Suitable for remote and deep-sea
| - Autonomous operation reduces ship
| (
|
- —European Cooperation in Science and Technology
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMarine animal studies overview · Marine and fisheries research · Coral and Marine Ecosystems Studies
Introduction
The importance of mapping marine animal forests
Marine Animal Forests (MAFs) are marine benthic habitats dominated by a three-dimensional structure formed by megabenthic invertebrates (> 1cm) such as anthozoans, sponges, sea pens, ascidians, tubeworms, bryozoans or hydrozoans ( Rossi, 2013; Rossi et al., 2017). MAFs are key ecosystems that, through their structural complexity, are used by associated organisms as a habitat, refuge, nursery and for food ( Cau et al., 2021; De Clippele et al., 2025). According to the Habitat Directive, the term habitat refers to an environment defined by specific abiotic and biotic factors, in which a species lives at any stage of its biological cycle (Council Directive 92/43/EEC). From a biological perspective, benthic habitat might more simply be defined as the place where an organism lives with associated physical descriptors of that place, such as seafloor morphology, geological substrate or oceanography ( Lamarche et al., 2016).
In the field of marine ecology and biogeography, mapping MAFs is important to help improve the knowledge of species and habitat distributions, habitat complexity, ecological processes, and the structure and dynamics of marine ecosystems ( Brown et al., 2011a). This information is valuable for identifying critical habitats, assessing human impacts on marine ecosystems, and supporting spatial planning and management for the conservation and protection of marine resources ( Harris & Baker, 2020; Lamarche et al., 2016). There are numerous examples of the importance of mapping, from the discovery of topographic structures of critical ecosystems (e.g. Diesing & Thorsnes, 2018; Gafeira et al., 2018), to understanding patterns in biodiversity and species distribution (e.g. Vinha et al., 2024), from ecosystem functioning ( De Clippele et al., 2021a; De Clippele et al., 2021b; Greiffenhagen et al., 2024) and to provide guidance for management, conservation plans, and policy decisions ( Davies et al., 2015; Mumby & Harborne; Ramiro-Sánchez et al., 2019). While underwater mapping is a crucial field with wide-ranging applications and significant importance across various domains - from exploration, scientific research, and marine management to maritime navigation or infrastructure development - currently, less than 25% of the ocean has been explored and remains unmapped ( Mayer et al., 2018), with less than 5% being mapped to a resolution similar to land-based maps ( Lim et al., 2021). This leaves our understanding of what lies beneath the surface incomplete and fragmented.
Currently, the EUSeaMap ( Figure 1) is the only pan-European cartographic product that provides a standardised transboundary overview of the spatial distribution of seabed habitats across Europe ( Vasquez et al., 2021). The European Nature Information System (EUNIS) categories have been utilised by the European Commission's marine data service, the European Marine Observation and Data Network (EMODNET), to develop this transnational, broad-scale seabed habitat map (i.e., EUSeaMap). EUNIS habitat classification encompasses all habitats, ranging from natural to artificial, including terrestrial, freshwater, and marine environments. The latest EUNIS version describes more than 1,600 marine benthic habitats, organised into seven main biological zones: Littoral, Infralittoral, Shallow Circalittoral, Deep Circalittoral, Upper Bathyal, Lower Bathyal, and Abyssal. The EUNIS habitat type A5.6, the sublittoral biogenic reefs include several MAFs such as polychaeta reefs, bivalve reefs and cold-water coral reefs, while type A6.62 is a deep-sea sponge aggregation. The continuous advancement of technology and knowledge of the seabed worldwide results in constant updates to the EUNIS classification and the EMODnet cartographic products.
Map of predicted seabed habitat types (EUNIS 2019 classification) across European waters as visualized in the EMODnet Map Viewer ( Vasquez et al., 2021).Color-coded categories correspond to habitat types listed in the legend. Source: European Marine Observation and Data Network (EMODnet).
Here, we provide an overview of the aspects (i.e., species or substrate data) of a MAF that can be mapped, along with the platforms and modelling tools available to do so. Over the last few decades, advanced underwater mapping technology has significantly enhanced our understanding of the seafloor environment and the biodiversity associated with MAFs. To date, most underwater maps display information on the local geomorphology, environmental conditions or biological data ( Kavanaugh et al., 2016). Depending on the depth, area, time period, and the resolution at which a MAF is to be mapped, different mapping platforms and tools can be used. To map biological data, geophysical data (e.g. depth, rugosity, slope, eastness, northness, bathymetric positioning index, backscatter) are often used, as proxies for oceanographic conditions (e.g. food supply, temperature, current speed), and are integrated with biological data (e.g. species presence) extracted from videos, images, or physical samples. As biological data are often limited, species and habitat distribution modelling approaches are increasingly being used to develop full-coverage maps.
Types of data: biological and substrate
To confirm the presence of and comprehensively understand patterns in the spatial distribution of a MAF habitat, it is essential to gather data on the presence of a MAF habitat-forming species and the associated substrate.
** Species. ** The presence of a MAF habitat-forming species can be established using imaging tools (photography/videography), active acoustic (i.e. sonar) or physical samples (e.g. De Clippele et al., 2017; Huvenne et al., 2003; Piechaud & Howell, 2022). Thanks to the development of remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), submersibles, and drones, the spatial coverage and amount of image data of MAFs have skyrocketed in the last 25 years. To increase the accuracy, efficiency and transparency of image and video annotations, several open-access platforms have been developed. Examples of open-source platforms for annotating video and images include BIIGLE ( Langenkämper et al., 2017), Video Annotation and Reference System (VARS) ( Schlining & Stout, 2006), Squidle+; ( https://squidle.org) and PAPARA(ZZ)I ( Marcon & Purser, 2017).
One of the challenges of using approaches based on video and image analysis is that high-resolution taxonomic identification is not always possible. However, there are different standardised annotation protocols for image-based identifications that can be followed. Some of these protocols include the CATAMI classification scheme ( Althaus et al., 2015), SmarTaR-ID ( Howell et al., 2019) or the use of Open nomenclature (ON) signs ( Horton et al., 2021). Furthermore, it is possible to gather species spatial data from online open-access databases. Some of the databases where the global distribution of species can be retrieved include: Ocean Biogeographic Information System (OBIS) ( https://obis.org), the Global Biodiversity Information Facility (GBIF) ( https://www.gbif.org), NOAA’s Deep-sea Coral Portal ( https://deepseacoraldata.noaa.gov), UNEP Global Distribution of Cold-water corals ( Freiwald et al., 2021; https://resources.unep-wcmc.org/products/fb9b160602e84a139ffc4fc16cf74bfc) and Online data repositories such as PANGAEA ( https://pangaea.de), Dryad ( https://datadryad.org), Zenodo ( https://zenodo.org/) and Figshare ( https://figshare.com).
Another challenge is related to the automated analysis of large image datasets. Deep learning approaches, such as the use of convolutional neural networks, are becoming increasingly accessible for benthic ecologists. Examples of user-friendly tools are YOLO ( Piechaud & Howell, 2022), RootPainter ( Clark et al., 2024), and MAIA in BIIGLE ( Cuvelier et al., 2024).
While imagery collected by ROVs, AUVs and drones provides valuable non-invasive insights into marine habitats and species distributions, real biological sampling remains essential for accurate species identification. Many marine organisms, particularly invertebrates, exhibit morphological similarities that are difficult to distinguish solely through imagery. Physical samples enable detailed taxonomic analysis, including microscopic and genetic examination, which is crucial for confirming species identity, identifying cryptic species, and refining image-based identification protocols. Integrating real sampling with visual data enhances the reliability and ecological relevance of biodiversity assessments, especially in deep-sea and poorly studied marine environments
** Substrate. ** The seabed is covered by a diverse range of substrates that play a crucial role in marine ecosystems, sediment transport, and seabed stability. These substrates influence benthic habitats ( Romoth et al., 2023), biogeochemical cycles ( Herbert, 1999; Microbial Ecology et al.) and human activities such as fisheries ( Langton & Auster, 1999), offshore construction ( Gerwik Jr, 2007), and environmental monitoring ( Rice et al., 2012). Mapping and classifying seabed substrates are fundamental for marine spatial planning and conservation efforts ( Boero et al., 2016; Papenmeier et al., 2020). Seabed substrates can be classified based on their composition and formation processes. The primary categories include sediment-based classification, grain size and texture and sediment composition.
A widely used classification system is based on sediment grain size, following the Folk (1954) ( Figure 2) and Wentworth (1922), and Udden (1914) scales. The primary categories include mud (<63 µm) (i.e. composed of clay and silt fractions), sand (63 µm - 2 mm) (i.e. further divided into fine, medium, and coarse sand) and gravel (>2 mm) (i.e. includes granules, pebbles, cobbles, and boulders (> 64 mm). Within the Folk classification system, there are different systems (e.g. folk 16-class system, folk-7 class system) with the main difference between these classifications lying in the proportion of sediment fractions ( Figure 2). For example, sediments with more than 90% sand are classified as sand, whereas those with 50–90% sand mixed with finer particles fall into the muddy sand category. Similarly, substrates with at least 30% gravel are categorised as gravelly sediments, while those with less gravel but more sand and mud are classified as mixed sediments. These classifications support habitat classification frameworks such as the EUSeaMap, 2023 Broad-Scale Predictive Habitat Map for Europe ( Vasquez et al., 2021) and the EMODnet Geology Seabed Substrate classification ( https://emodnet.ec.europa.eu/en/geology).
The Folk sediment triangle and the hierarchy of Folk classification (16, 7 and 5classes, plus an additional class “rock and boulders,” indicated by the arrow) used in the EMODnet Geology project ( Kaskela et al., 2019).
Grain size is a key determinant of sediment transport, seabed stability, and habitat suitability. The Wentworth (1922) classifies sediments based on particle size, influencing sediment permeability and organic matter retention: clay (<0.0039 mm), silt (0.0039 mm - 0.0625 mm), sand (0.0625 mm - 2 mm), granule (2 mm - 4 mm), pebble (4 mm - 64 mm), cobble (64 mm - 256 mm) and boulder (>256 mm). Larger grains such as gravel and boulders are typically found in high-energy environments where strong currents or waves transport heavier materials. Conversely, finer grains, such as silt and clay, settle in low-energy environments, where calm conditions allow very small particles to accumulate.
Beyond grain size, seabed sediments are also classified based on their origin and composition ( Chester & Jickells, 2012; Knauss & Garfield, 2016; Seibold & Wolfgang, 2017, etc.). Terrigenous sediments are derived from land-based sources, transported to the ocean by rivers, wind, or glaciers. They are the most abundant and include sand, silt, and clay materials. Biogenous sediments are composed of the hard parts of marine organisms, such as shells and skeletons. When these materials constitute at least 30% of the sediment, they are referred to as "oozes". Hydrogenous sediments are formed from the precipitation of dissolved minerals directly from seawater, often found near hydrothermal vents.
Seabed substrate classification plays a significant role in various marine applications. In marine spatial planning it can provide essential data for marine resource management and offshore development projects ( Propp et al., 2016). In habitat mapping, it supports ecosystem conservation efforts and biodiversity assessments ( Boero et al., 2016). For sediment transport studies, it helps predict seabed stability and erosion patterns ( Davies & Thorne, 2008). Fisheries and offshore construction can use this information to decide on how their infrastructure may impact the presence of existing or the formation of new habitats ( Boero et al., 2016). Knowledge of the substrate is also essential for tracking changes due to climate change and human activities ( Trifonova et al., 2015).
International and national databases compile seabed sediment data to provide standardised information. A key example is the EMODnet Geology Seabed Substrate Database ( https://emodnet.ec.europa.eu/en/geology), which provides seabed substrate data for European seas.
Tools and technologies
To map MAFs a variety of mapping platforms can be used, operating from space, the air, or the sea ( Kearns & Breman, 2010; Li et al., 2023, and references therein) ( Figure 3). The choice of platform will depend on the habitat’s depth (< or > 20 m), the size of the area that is to be mapped (meters, 10s or 100s of kilometres), and the resolution needed (centimetre to kilometre scale) ( Table 1).
Flowchart to help a user decided which tool to use.
Space-based mapping
Space-based mapping platforms (i.e. Spaceborne platforms) allow one to map shallow habitats (< 20 m) at large spatial scales 10–100s of kilometres, but often at low to coarse resolution (meter- 100s km scale). Spaceborne platforms consist of a variety of satellites with sensors able to provide satellite-derived bathymetry and satellite altimetry ( Selgrath et al., 2016). For instance, satellite imagery represents a powerful tool to map the extent of shallow tropical coral reefs ( Figure 4, Lyons et al., 2024). According to Nguyen et al. (2021) satellites, as a tool to map tropical coral reefs, are used in almost 50% of the studies and are recommended by the Coral Reef Expert Group for habitat mapping and change detection on a broad scale ( González-Rivero et al., 2020). In 2021, twice as many papers were published in the two years prior compared to in the last ten years ( Nguyen et al., 2021). Satellite imagery is especially useful for mapping large spatial areas, such as at a global and regional scale, and for monitoring changes in habitat coverage over long time periods at an affordable price. For example, Palandro et al. (2003) demonstrated, by using satellite data, a loss in coral cover in the Carysfort Reef in Florida (USA), going from 52% in 1981 to 6% in 2000. Satellite imagery has also been used to map litter associated with tropical coral reefs and track the movement of megafauna, such as turtles and sharks, between coral reef areas.
Distribution of tropical coral reefs.Screenshot from Allen Coral Atlas (2022) portal ( Mitchell et al., 2022) Allen Coral Atlas | Atlas with more recent additions provided in ( Lyons et al., 2024).
However, there are a couple of aspects to consider when choosing satellite images. First, depending on using data from multispectral and hyperspectral satellites, the spatial resolution (i.e. the surface represented by a pixel) of the habitat one can map will be higher or lower. Currently, the best achievable resolution of hyperspectral sensors ranges from several tens of meters to up to 1 km ( Hedley et al., 2016). In contrast, most multispectral sensors have a resolution better than 4 m. However, the resolution of satellites is quickly improving, and with it, the accuracy of coral maps. Secondly, the ability to use satellite data to map MAF also depends on sunlight penetration. Areas that have a lot of cloud cover may have clouds “blocking” the view, and light attenuation in water due to absorption and scattering results in satellites often being unable to map accurately and/or below 20 m depth. Tropical coral reefs can extend beyond 20 m depth, and therefore, maps produced with satellite imagery may underestimate the true extent of the reefs ( Eyal et al., 2021; Galbraith et al., 2022; Liaño-Carrera et al., 2019).
Air-based mapping
Airborne platforms consist of manned aeroplanes, helicopters and drones and unmanned aerial systems (UAS), which are used to map the seafloor at local and regional scales (1-to-100 km ^2^), and are most useful for mapping shallow MAFs (<20 m). Like satellites, airborne tools are also used to map tropical coral reefs ( Collin et al., 2018; Hamylton, 2017). These platforms mostly use electromagnetic waves and primarily encompass aerial photography, active light detection and ranging (LiDAR) and radar imaging ( Javan et al., 2025 and references therein). Depending on the closeness of the airborne vehicle to the ocean’s surface, a spatial resolution from several centimetres up to hundreds of metres can be achieved. Another advantage of using airborne mapping tools is that one can control the time of day and the flight direction, which can avoid issues with sunlight reflection and times with cloud coverage. They can also cover a relatively large area in a short time and can usually be operated for several hours per day. While drones are a relatively cost-efficient way to map an area, manned airplanes and helicopters are more costly.
Systems such as UAS leverage aerial photogrammetry to generate high-resolution spatial data, contributing significantly to marine habitat monitoring and conservation efforts ( Figure 5) ( Monteiro et al., 2021; Ventura et al., 2023). By integrating Red Green Blue (RGB) and multispectral imagery, UAS-based habitat mapping enables the generation of digital surface models (DSM), 3-dimensional (3D) mesh models and RGB and multispectral orthomosaics ( Kvile et al., 2024; Mazza et al., 2023) ( Figure 5). Ground control points (GCPs) and georeferencing techniques enhance the spatial accuracy of the derived products, while bathymetric corrections improve mapping capabilities for submerged structures ( Alevizos et al., 2022a; David et al., 2021; Mandlburger et al., 2021).
UAS-derived imagery products for seafloor/habitat mapping purposes.Three of the basic drone products are an ( A) orthophotomosaic, ( D) 3D photorealistic model of the area, ( B) a (topo-bathy) DSM, all three at cm scale. ( C) The biotope/habitat map is the final stage of the analysis. The codes readable on the map provided are the HD habitat codes, i.e. 1110 - sandbanks, 1170 - reefs, 1210/2110 - Annual vegetation of drift lines/ embryonic shifting dunes, 1240 - Vegetated sea cliffs of the Mediterranean coasts with endemic Limonium spp, 8210 - Calcareous rocky slopes with chasmophytic vegetation, 3150 - Natural eutrophic lakes with Magnopotamion or Hydrocharition, 62C0 - Ponto-Sarmatic steppes, 8310 - Caves not open to the public, 8310 - submerged or partially submerged sea caves, Enr - enrockment (rip-rap), Hts - hydrotechnical structure/coastal engineering structure.
One of the main advantages of UAS technology is its ability to provide high-resolution data compared to satellite or aircraft-based remote sensing. Additionally, UAS surveys are cost-effective and offer a flexible alternative to traditional hydrographic methods ( Alevizos et al., 2022a; Kvile et al., 2024), allowing for rapid data collection across extensive areas with reduced time and resources. These advantages make UAS an indispensable tool for habitat classification, supporting machine-learning models in distinguishing different habitat types ( Giles et al., 2023; Nababan et al., 2021; Tallam et al., 2023; Ventura et al., 2023) ( Figure 5C). Furthermore, the generation of DSMs ( Figure 5B) and mesh models enables detailed morphological assessments of underwater features ( David et al., 2021; Prodanov et al., 2020), including shallow-water archaeological sites ( Mazza et al., 2023; Prahov et al., 2020), while multitemporal surveys facilitate change detection, helping monitor habitat changes due to both natural and anthropogenic factors ( Kvile et al., 2024; Monteiro et al., 2021).
Despite its many benefits, air-based mapping also presents several challenges. Water clarity and depth significantly impact the effectiveness of photogrammetry, as optical penetration is limited in deeper or turbid waters ( Alevizos et al., 2022a; Mandlburger et al., 2021). Environmental conditions such as surface reflections, wave motion, and lighting variations can also affect image quality and data accuracy ( David et al., 2021; Kvile et al., 2024). Moreover, regulatory constraints must be considered, as for example, UAV operations in coastal areas require compliance with aviation and marine protection regulations. Addressing these limitations requires the integration of advanced sensor technologies, improved image processing algorithms, and optimised flight planning strategies. As for satellite-based images, air-based methods can only be used to map relatively shallow systems (~20 m depth). While repeated surveys are possible with this approach, often data will only be collected for the duration of a project (<10 years). It was only in the early 2000s that researchers started using drones to map and monitor wildlife. Therefore, it is unlikely that baseline data from before then is available for comparison. Consequently, most studies using airborne mapping approaches use the data to describe the extent, composition and complexity of the habitat.
In conclusion, air-based technology is revolutionising the mapping of underwater habitats, offering high-resolution and cost-effective solutions for marine spatial planning and conservation. Future developments in sensor integration, artificial intelligence (AI)/machine learning (ML) algorithms, AI-driven classification, and advanced photogrammetric processing will further enhance its capabilities in underwater habitat mapping to classify coastal habitats with minimal or no field data collection ( Kvile et al., 2024; Liu et al., 2022).
Sea-based mapping
There are three categories of sea-based mapping platforms: i.e. those at the surface, underwater and those held by divers and snorkellers. Sea surface platforms comprise vessels of different sizes and capabilities, including Unmanned Surface Vehicles (USV). Underwater platforms comprise manned submersibles, unmanned tethered Remotely Operated Vehicles (ROV) and untethered Autonomous Underwater Vehicles (AUVs). Divers could be considered “living underwater platforms”. Active acoustic (e.g. seismic and multibeam sonar) and image-based tools are attached to sea-based mapping platforms to map habitats at local and regional scales.
The advantage of surface-based mapping platforms, such as ships, is that they can travel at greater speed and cover larger areas. It is relatively easy to follow a straight trajectory and maintain a constant speed (i.e., usually 5–8 knots). Fair sea conditions are also needed to collect high-quality data. Both single-beam and, especially, multibeam data have been used to produce seafloor maps at various scales, from local (e.g. De Clippele et al., 2017) to basin-scale (e.g. Schumacher et al., 2022). One disadvantage when working with multibeam systems is that in deeper habitats, the resolution of the maps is lower due to the larger distance between the seafloor and the hull of the surface-based vessel.
Whereas there are some manned submersibles in use across the world, the number of unmanned vehicles largely outweighs the manned ones, mostly because of safety reasons and associated operational procedures and costs. The advantages of underwater platforms are that their payload is modulable depending on each specific mission's needs and that they can operate at very short distances from the seafloor, thus enhancing data resolution. An inconvenience of these platforms is that they move at relatively low speeds, can struggle to hold position and can usually operate for only several hours a day, although longer continuous periods could be envisaged in the case of AUVs.
Divers can carry a variety of instruments (e.g., video and photographic cameras), and assist in detailed mapping and, more importantly, in the in-situ ground truthing of data acquired from other platforms. For example, they can check in situ if a given object is hard or soft, a property that is often not obvious from imagery alone. However, such inputs by divers are limited by factors related to water depth and time spent underwater.
Beyond very shallow coastal waters, a combination of sea surface platforms for medium to large-scale general mapping (i.e. from km ^2^ to 100’s of km ^2^ in size areas) with underwater platforms for detailed inspection and mapping of spots previously identified in the general maps, appears as the best approach for MAFs mapping.
** Active acoustic tools. ** Active acoustic sonar-based technologies emit sound pulses from a transmitter, which then travel to the bottom and, in some cases, penetrate the seafloor down to variable depths while reflecting the upwards part of the emitted energy, which is recorded by a receiver. This signal is then processed in order to obtain a graphical expression of the surface or subseafloor ( Dowdeswell, 2016; Jakobsson et al., 2016).
** Side Scan Sonar profiling. ** Side Scan Sonar (SSS) has become an essential tool for underwater habitat mapping due to its ability to provide high-resolution acoustic imagery of the seafloor. By analysing differences in acoustic reflectance, researchers can infer sediment composition, habitat structures, and biological distributions. The effectiveness of SSS in habitat mapping lies in its capability to cover large areas efficiently while maintaining high spatial resolution, making it ideal for applications in marine ecology, fisheries management, and environmental monitoring ( Blondel, 2009; Degraer et al., 2008; Greene et al., 2018; Klaucke, 2017; Sun et al., 2021).
SSS operates by transmitting acoustic pulses from a transducer mounted on a towed vehicle, an autonomous underwater vehicle (AUV), or a ship. These pulses propagate through the water column and reflect off the seafloor, with the returning signals recorded to generate an acoustic image. The intensity of the returned signal, or backscatter, varies depending on the texture, hardness, and composition of the seabed ( Ainslie, 2010; Blondel, 2009). Backscatter measurements, often used in combination with bathymetric data, provide insights into the distribution of different habitat types. Areas with high backscatter typically correspond to hard substrates such as rocky outcrops, whereas low backscatter is associated with soft sediments like mud and sand ( Lurton et al., 2015).
The data acquired from SSS surveys is processed into various products that aid in habitat classification and environmental assessments. These include (a) sonograms, which are raw acoustic images that display variations in backscatter intensity, used to visually interpret habitat types and seabed structures; (b) mosaics, which are composite images created by stitching together multiple sonar passes to form a continuous, large-scale representation of the surveyed area ( Figure 6); (c) backscatter maps, which are georeferenced representations of sonar intensity values, aiding in quantitative analysis of seabed properties; (d) habitat classification maps, which are interpreted maps where seabed types and biological zones are categorized based on sonar data and ground-truth samples; (e) three-dimensional models, which are when integrated with multibeam bathymetry data, SSS imagery can contribute to the development of 3D models of underwater landscapes, enhancing visualization and analysis.
Side-scan sonar mosaics from the "Ropotamo" MPA, Southern Bulgarian Black Sea Coast ( Dimitrov et al., 2019; Todorova et al., 2015).
One of the primary applications of SSS in habitat mapping is classifying benthic environments based on substrate type and structure. The strength of the sonar signal provides crucial information about the composition of the seafloor. For example, studies have correlated high-resolution SSS images with sediment grab samples to classify seabed habitats in fisheries management ( Lucieer, 2008; Micallef et al., 2012; Papatheodorou et al., 2012; Todorova et al., 2015).
Manual interpretation of SSS imagery can be time-consuming and subjective. Therefore, automated image classification techniques have been developed to improve accuracy and efficiency. Algorithms and supervised classification methods have been used to distinguish between different habitat types, achieving classification accuracies above 80% ( Brown & Collier, 2008; Kaeser et al., 2013; Ojeda et al., 2004; Rusmadi & Hasan, 2020; Sun et al., 2020)
SSS is extensively used to study the spatial extent, geomorphology, and geological composition of underwater landscapes, including reef structures, sedimentary deposits, and tectonic features. By integrating SSS data with ground-truthing methods such as sediment coring, bottom photography, and high-resolution bathymetry, researchers can characterise geomorphic features such as underwater ridges, sandbanks, rock formations, and fault structures. For example, high-resolution SSS mosaics have been instrumental in identifying lithological variations, fault structures, and sediment transport patterns, contributing to improved geological and geomorphological mapping of continental shelves and reef ecosystems ( Blondel, 2009; Dimitrov et al., 2019; Pillay et al., 2020; Subarsyah & Arifin, 2019; Todorova et al., 2015; Wang et al., 2023; Zhao et al., 2018).
Advancements in sonar technology and image processing are set to transform habitat mapping with SSS. Machine learning models for automated classification and real-time data processing will enhance mapping accuracy, reducing subjectivity and increasing efficiency ( Pijanowski & Brown, 2021). The integration of SSS with AUVs and ROVs can facilitate high-resolution, real-time habitat assessments, expanding sonar applications in deep-sea exploration and environmental monitoring ( Wynn et al., 2014). Additionally, emerging multi-frequency and multispectral sonar systems improve substrate discrimination, offering more detailed seafloor characterisation ( Gaida et al., 2018). The combination of SSS with other remote sensing technologies, such as LiDAR and satellite-derived bathymetry, will further refine seabed classification and habitat mapping ( Ierodiaconou et al., 2018).
Despite certain limitations, SSS remains a cornerstone of underwater habitat mapping, providing high-resolution acoustic imagery essential for marine science and conservation. Global initiatives like Seabed 2030 leverage advancements in sonar to map the entire ocean floor at high resolution, addressing knowledge gaps in marine ecosystems ( Mayer et al., 2018). By overcoming current challenges and harnessing new technologies, SSS will continue to play a key role in sustainable ocean management, supporting biodiversity protection and ecosystem monitoring.
** Seismic reflection profiling. ** Seismic reflection profiling is a widely used tool to image the subseafloor at shallow (1-10’s of meters scale), intermediate (10’s to a few 100’s of meters scale) and large depths (several 100’s of meters to kilometres scale) ( Crutchley & Kopp, 2018). This method can be used to reveal information on the formation and history of certain marine animal forests, such as cold-water coral carbonate mounds.
The method relies on the emission of sound pulses to obtain a graphical expression of the subseafloor structure in the form of a seismic reflection profile ( Jakobsson et al., 2016). Seismic reflection profiling requires an energy source, a receiving system of the reflected energy, a recording unit for data storage, and processing and visualisation software at various stages (e.g. pre-processing or post-processing). Acoustic impedance contrasts are stronger at interphases separating materials with distinct physical properties, such as sediments from underlying rocks, or sedimentary layers of different densities. These interphases are known as “seismic reflectors”. Consequently, the continuous repetition of emission-reception cycles over time allows for visualising the configuration of materials in the sub-seafloor along the time axis, including the boundaries between different geological units and their internal structure. That is why seismic reflection profiles usually have a vertical axis in two-way travel time (in seconds or milliseconds), expressing the time required for the signal to travel from the location of the source (at the sea surface or below) to the different reflectors at depth and back. The horizontal axis is also expressed in time, which in this case represents the time required for successive emission-reception cycles while the vessel moves forward at a controlled speed ( Jakobsson et al., 2016).
There is a wide variety of seismic reflection systems, each designed for a specific purpose. The most interesting for MAFs and other shallow subseafloor studies are very high to high-frequency systems, which allow for penetrating the upper sediment layers while providing centimetre to decimetre-scale resolutions. Other high-resolution towed seismic reflection systems, such as boomers or small sparkers, could also be of interest, although they are intended to achieve larger depths below the seafloor than those strictly needed for MAFS studies. In these systems, both the source (emitter) and the receiver system are towed behind the mother vessel. Receivers usually consist of a flexible pipe (named streamer) holding a set of hydrophones to detect the reflected acoustic signals. Acquisition can be single-channel or multi-channel, and 2D or 3D (seismic cubes). Grids of densely spaced 2D profiles can be used to produce pseudo-3D seismic cubes. For example, sub-bottom profiler data have been used, in combination with side scan sonar data, for benthic habitat mapping in a number of places worldwide (e.g. Alevizos et al., 2022b; Fakiris et al., 2018; Hamouda et al., 2024; Ierodiaconou et al., 2018; James et al., 2007).
** Multibeam sonar. ** Since the early 1990s, multibeam echosounders have become the dominant method for full-coverage seafloor mapping at all depths. Similar to seismic reflection systems, multibeam systems require the emission of repeated energy pulses at high frequencies that travel and are reflected off the seabed, returning to the surface or the location of the survey vehicle. Today, there is a wide variety of multibeam systems on the market, some of which are designed for shallow coastal waters and small-sized boats or underwater vehicles, whereas others are intended for ocean depths and can only be installed in large vessels. The diversity of multibeam systems can be seen on the webpages of the leading manufacturers, such as Atlas Hydrographic, Konsberg Discovery, LC Klein, Norbit, Teledyne RESON A/S, or Wärtsilä Elac Nautik.
As indicated by their name, multibeam systems consist of arrays of emitters and receivers, each of which emits a beam with specific properties (e.g., amplitude, single-beam opening angle). Adjacent beams form a fan-like front that successively insonifies seafloor stretches of a given total width as the carrying platform advances, which can be either a surface vessel or an underwater vehicle. Successive swaths expanding towards both sides of the platform provide full coverage of the insonified area along a given stretch of the seafloor. The width of the mapped seabed stretch depends on water depth (i.e., the larger the water depth, the wider the stretch) and on system configuration (i.e., the larger the total opening angle of the beam ensemble, the wider the stretch) ( Jakobsson et al., 2016). Overlapping successive, generally parallel, stretches allow for achieving full coverage bathymetric maps of given regions, which are essential for habitat mapping and understanding, including MAFs. Further, any kind of information, such as landform features or species presence, could be draped on the bathymetry base map using geospatial software such as ArcPro or QGIS (e.g. Sowers et al., 2024)
The footprint of every individual beam determines the resolution of the bathymetric products obtained from multibeam systems, such that smaller footprints (involving less energy and higher frequencies) result in higher-resolution maps. However, to travel deeper, more energy is needed, which usually implies that deep-water bathymetric maps have poorer resolution than shallow water ones, unless using an underwater vehicle capable of carrying the system close to the seabed. Vessel speed while profiling must be as constant as possible and not too high (i.e., usually around 8 knots) to ensure the quality of the data, though this ultimately depends on vessel’s performance and sea state. Usually, multibeam systems are hull-mounted, although they can also be attached to ROVs and AUVs, resulting in very high-resolution data. For example, at the Mingulay reef complex a “microbathymetry” was collected through attaching a MBES to an ROV. This resulted in a map of a 20 cm resolution on which live cold-water coral colonies were visible and annotated for use in a species distribution model ( De Clippele et al., 2017).
Multibeam data enable the creation of a variety of mapping products that can be particularly useful. These include backscatter intensity maps, which represent the intensity of ”backscattered” seabed reflection of the emitted signal, itself indicative of the seabed’s nature, either rocky or sedimentary or vegetation-covered. Another option is generating 3D Digital Terrain Models from full coverage bathymetry datasets, allowing visualisations from different angles and elevations, with more or less vertical exaggeration of seascape images to better visualise specific features ( Fabri et al., 2017). Other cartographic products directly derived from multibeam bathymetry data, which are increasingly being used, include rugosity (a dimensionless measure of surface roughness), slope gradient, bathymetric positioning index, and aspect (slope orientation), and segmentation (per backscatter classes, for instance) maps ( Canals et al., 2020; De Clippele et al., 2017 and references therein).
If repeated at given intervals of time, such full-coverage maps allow for the monitoring of seascape and habitat evolution in an unprecedented way. Repeated multibeam surveys have been done to assess both short and long-term changes associated with the seafloor (e.g. Normandeau et al., 2020). The “Digital Elevation Model (DEM) of Difference” (DoD) can be calculated and will indicate the change in elevation with positive values showing deposition (or fill), negative values showing erosion (or cut, scour) and null values showing an unchanged surface ( Schmitt et al., 2008). However, the accuracy of the depth values can be affected due to different sonar systems being used, vessel-related differences because of configuration and weather conditions, differences in oceanographic conditions and issues related to the use of geo-positioning techniques ( Brothers et al., 2011; Schmitt et al., 2008). These inaccuracies may be more pronounced in deeper locations and areas with more complex hydrodynamics, such as cold-water coral reefs. Given enough time and under the right environmental conditions, cold-water coral reefs can develop from mini-mounds to large, cold-water carbonate mounds. While these mounds can be mapped and characterised using multibeam sonar approaches, to date no studies have assessed long-term changes in their morphology. Using multiple acoustic frequencies could also be useful as it may help differentiate seafloor features of various sizes and shapes ( Whitmire et al., 2007).
** Cameras. ** Image-based tools, such as cameras that capture still images or video, are widely used in marine habitat mapping. These systems typically provide centimetre-scale resolution and cover relatively small spatial areas (usually less than 1 km ^2^). Cameras can be operated by divers, deployed from vessels using various support systems (e.g., drop or drift cameras), or mounted on underwater vehicles such as Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) ( De Clippele et al., 2017; Foubert et al., 2011; Huvenne et al., 2011; Robert et al., 2017; Van Audenhaege et al., 2021).
The characteristics of the vehicles and camera systems, particularly in terms of stability, lighting, and control, influence the type and quality of data collected, making each platform more suitable for specific objectives or environments.
ROVs are controlled from a surface vessel, allowing real-time decision-making and fine manoeuvrability. This makes them ideal for targeted observations, detailed inspection of specific areas, or sample collection. Their lighting systems can be adjusted on the spot to adapt to local visibility conditions. However, their dependence on a ship-based control system and umbilical cable limits the area they can cover and may introduce motion constraints.
AUVs, on the other hand, are autonomous platforms that follow pre-programmed missions without human control during deployment. They are especially well-suited for high-resolution mapping of small to medium-sized areas due to their stable motion and efficient, systematic coverage. AUVs often carry advanced cameras and lighting systems calibrated for optimal imaging conditions. While they offer high spatial resolution and consistency, they lack flexibility during missions and cannot adjust to unexpected features in real time.
High-resolution (<1 cm) video mosaics, combined with multibeam sonar data, typically mounted on AUVs, have provided valuable insights into the spatial organisation of deep-sea coral frameworks and the environmental and temporal drivers influencing them ( Boolukos et al., 2019; Conti et al., 2019; Price et al., 2019). As a result, non-invasive methods involving remote imaging technologies are increasingly favoured for studying and monitoring marine benthic habitats.
The quality of the imagery depends on several factors, including the camera specifications, lighting conditions, and water turbidity. Image resolution is generally highest when the platform is stationary or moving slowly. Collecting data close to the seafloor improves the ability to identify organisms and benthic structures. However, operating very close to the bottom may pose safety concerns and increase the risk of disturbing or damaging fragile marine life.
Techniques: Mapping approaches
Supervised and unsupervised mapping and modelling approaches are being used to either automate habitat mapping or characterisation, or to predict habitat or species presence for areas where biological data is missing but environmental data is available ( Figure 7). These methods provide a more detailed understanding of the environmental envelope in which species and habitats occur, and can therefore be used to predict how the distribution of habitats and species may change under different climate change scenarios. Two types of data are required to produce a model: biological (response) data and environmental (predictor) data.
Flowchart to help a user decided which mapping approach to use.
Biological data usually comes in the form of image data or physical samples. Thanks to global open-access initiatives, a substantial amount of biological data is now available through open-source platforms such as the Global Biodiversity Information Facility (GBIF; https://www.gbif.org/) or the Ocean Biodiversity Information System (OBIS; https://obis.org/) and researchers are publishing their datasets on online data repositories (e.g., PANGAEA, Dryad or Figshare). GBIF functions as a global repository for species occurrence records, aggregating data from diverse sources including museums, research institutions, environmental monitoring programs, and citizen science initiatives. OBIS, developed under the auspices of the Intergovernmental Oceanographic Commission of UNESCO, providing georeferenced data on the distribution of marine species collected through research cruises, monitoring programs, and other marine surveys. Together, these platforms significantly enhance the accessibility and integration of marine biodiversity data.
Among the most common environmental parameters, critical for the spatial distribution of the MAF species are bathymetry and morphological parameters describing 3D microhabitats, the substrate, the direction and intensity of marine currents, the roughness of the sea bottom and its orientation, temperature, salinity and nutrients concentrations (e.g. Chimienti et al., 2019; Chimienti et al., 2020). Environmental data can be derived from images, physical samples, multibeam and backscatter maps and models. Much relevant data is now also available as part of open-access databases, such as GEBCO bathymetry ( Mayer et al., 2018) (providing a global bathymetric grid). Copernicus Marine Service (providing different physical and chemical oceanographical data products), Bio-Oracle ( Assis et al., 2018; Assis et al., 2024; Tyberghein et al., 2012) (providing current and future physical and chemical oceanographic datasets), NASA Earthdata and or European Space Agency Climate Office (providing satellite imagery of environmental conditions.
Unsupervised habitat mapping
Unsupervised underwater habitat mapping is a technique that utilises algorithms to map elements with segmented data, followed by the assignment of biological information, such as habitat type, identified from ground-truth observations made by a camera or physical sampling (e.g., Calvert et al., 2015; Lamarche et al., 2016; Schumacher et al., 2022). This approach is most effective in marine environments where sampling data may be scarce. It has traditionally been the most common method of conducting benthic mapping ( Misiuk & Brown, 2024). A significant data source for shallow waters comes from electromagnetic remote sensing technologies (e.g., laser scanning or LiDAR, and multispectral or hyperspectral cameras) providing images or products that can be processed using unsupervised methods to map underwater features, especially coral reefs ( Misiuk & Brown, 2024). However, acoustic data technologies, such as MBES or SSS, are among the most common sources of data for benthic habitat mapping ( Brown et al., 2011b), owing to their ability to provide full-coverage bathymetry and backscatter data from shallow to deep-sea environments.
The use of unsupervised models for processing environmental data has significantly increased over the past decade, replacing manual interpretation by experts. These models aim to identify meaningful patterns in environmental variables without relying on response information. They include various machine learning and clustering algorithms such as k-means, Self-Organizing Maps (SOMs), DBSCAN and OPTICS (e.g., Fendereski et al., 2014; Hoang et al., 2016; Menandro et al., 2022; Weslawski et al., 2013). Another novelty unsupervised technique for benthic mapping is Simultaneous Localisation and Mapping (SLAM), which allows AUVs to simultaneously map their environment and determine their location within it using probabilistic and iterative methods ( Liu et al., 2024). Also, Deep Learning Methods such as Autoencoders or Generative Adversarial Networks (GANs) are being used in assessing and mapping benthic marine habitats ( Burns et al., 2022; Massot-Campos et al., 2023; Yamada et al., 2021).
Clusters identified using these algorithms can be categorised using ground truth information for mapping or validating the resulting classifications. This ground-truth data usually takes the form of underwater imagery, as it allows for broader sampling of the seabed compared to physical samples taken using drags or grabs ( Brown et al., 2011a). Additionally, it is a non-invasive method, particularly suitable for complex areas such as rocky bottoms or slopes, without causing significant damage to the ecosystem.
Geomorphological mapping
Certain MAFs, such as cold-water coral, bivalve and polychaete reefs either form elevated biogenic structures or grow on them. Therefore, mapping these structures can reveal information about their distribution. Such structures are reefs or mounds. Their presence can indicate information on the abundance of vulnerable marine habitats in an area ( Ramiro-Sánchez et al., 2019), and their geomorphological characteristics can be used as proxies for environmental conditions as part of species distribution models ( De Clippele et al., 2017). Manually delineating these features of interest can be very time consuming and can result in non-repeatable results ( Arosio et al., 2024). Therefore, there have been several semi-automated approaches developed.
Gafeira et al. (2018) developed a GIS tool to map pockmarks, which was adapted to map coral mounds in De Clippele et al. (2017), and has recently been made available as an open-source ArcMap Toolbox, i.e. the CoMMa toolbox ( Arosio et al., 2024). This tool is very flexible and allows one to map both elevated structures and depressions. It allows for the delineation and characterisation of features in just a few repeatable steps. Object-based approaches have also been used to automatically derive maps of coral carbonate mounds in Norway ( Diesing & Thorsnes, 2018).
Species distribution modelling
Several algorithms are available for use in species distribution modelling (SDM) ( Barker & MacIsaac, 2022, table 2, Winship et al., 2020); these are defined by the availability of presence data and their number, the occurrence of real absence data or the need for random creation of pseudoabsences. Several workflows have been developed in R ( Guéguen et al., 2025; Kass et al., 2023; Naimi & Araújo, 2016). Each one has strengths and weaknesses, mostly around the learning curve and the technical requirements.
SDM outputs are spatially explicit maps that also include information on the response of the studied species to the used environmental data, referred to as “response curves”. The maps, as a spatial information can be used and is already, for spatial prioritisation modelling when new Marine Protected Areas are needed to be designed or the current designed are under review based on IPCC climate change scenarios, under the SPPs, where adaptation to the current MPA boundaries have to be checked under various climate change scenarios ( Adam et al., 2021; Doorga et al., 2023; Principe et al., 2021). Such a combined use of modelling is useful and paves the road for adaptive designation of MPAs in the future.
Biomass distribution modelling
The extent of a species does not necessarily reveal the extent of its contribution to ecosystem processes, such as carbon and nitrogen turnover, in an area. This is because an organism’s size and its biomass can vary across environmental and temporal gradients, influencing the amount of nutrients being turned over ( Clark et al., 2024; De Clippele et al., 2021a; De Clippele et al., 2021b; Greiffenhagen et al., 2024).
Mapping biomass variations in marine animal forests (MAFs) is a complex task. In terrestrial ecosystems, large-scale biomass mapping is often supported by remote sensing technologies like satellite imagery, which are combined with field data ( Baccini et al., 2008). While satellite imagery has been used to map coral reefs, its application to MAFs is hindered by the variation in depth and species diversity, which reduces its accuracy for biomass estimation. Any habitats deeper than 30 meters are likely to be missed by satellite imagery alone, making this approach unsuitable for deep-sea environments. Although periodic and continuous photographic surveys of the seafloor are becoming more common ( Boolukos et al., 2019; Bodenmann et al., 2023; Conti et al., 2019; Van Audenhaege et al., 2021; Van Audenhaege et al., 2024), their large-spatial-scale application remains limited.
To address the challenge of accounting for spatial biomass variation and improve the accuracy of ecosystem-level nutrient turnover estimations, De Clippele et al. (2021a) developed a novel "biomass mapping approach." This method leverages machine learning models that integrate biological, environmental, and ecosystem function data to map the spatial variation of species within a given area. The biomass values derived from this mapping can then be used to calculate the overall nutrient turnover for the modelled species across the entire ecosystem ( De Clippele et al., 2021a; De Clippele et al., 2021b; Greiffenhagen et al., 2024). The approach relies on surface area data extracted from images ( De Clippele et al., 2021a). These measurements can be obtained through various methods: manually using Image J software ( De Clippele et al., 2021a), semi-automatically using Photoshop ( De Clippele et al. 2021b; Greiffenhagen et al., 2024), or could be done fully automatically ( Clark et al., 2024).
Community distribution modelling
Instead of modelling the distribution of species individually, it is also possible to model the distribution of species assemblages or communities. Community-based models can be developed using a similar approach to species distribution models (SDMs) (see previous section), where spatial distribution data of communities and relevant environmental variables are used to predict their distribution into novel areas. In these models, rather than using a dataset of presence-absence records for individual species (i.e. univariate model), a dataset with multiple categories representing different species assemblages or communities (e.g., community 1, community 2, community 3, etc.) (i.e. multivariate model), with their respective spatial distribution, is used. Machine learning techniques can be particularly well-suited for this type of modelling due to their ability to handle a multi-class response variable. For example, Random Forest classifications have been used to create full coverage maps of community distributions on seamounts ( Goode et al., 2021; Vinha et al.) ( Figure 8), where environmental variables were used to predict the distribution of communities beyond sampled areas.
Schematic representation of a workflow that can be used to create predictive community maps of Marine Animal Forests.Created in Canva.
If spatial data on communities is not available, but instead, spatial data on different species in a study area is available, Joint species distribution models (JSDMs) might be a useful approach for community modelling ( Roberts et al., 2022; Stephenson et al., 2024). This method allows for predicting the distribution of multiple species simultaneously, being useful to evidence species interactions and co-occurrence patterns within a community ( Pollock et al., 2014).
Conclusion
Higher-resolution and deep learning approaches are contributing to the accuracy, speed, and consistency with which we are mapping MAF. However, both lower resolution and manual approaches remain having a key value, especially in unmapped or unexplored areas, which still comprise the majority of our oceans. This overview of tools and approaches serves as a guide for users to assess which approach they may want to use in specific situations. Mapping the seafloor at various resolutions and through different methods is crucial for conservation efforts, as it enables a more comprehensive understanding of habitat distribution, biodiversity, and biomass variations, ultimately informing more effective and targeted management strategies for preserving marine ecosystems.
Ethics and consent
Ethical approval and consent were not required.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Adam AAS Garcia RA Galaiduk R : Diminishing potential for tropical reefs to function as coral diversity strongholds under climate change conditions. Divers Distrib. 2021;27(11):2245–2261. 10.1111/ddi.13400 · doi ↗
- 2Ainslie M : Principles of sonar performance modelling. Springer Berlin Heidelberg, Berlin,2010. 10.1007/978-3-540-87662-5 · doi ↗
- 3Alevizos E Oikonomou D Argyriou AV : Fusion of drone-based RGB and multi-spectral imagery for shallow water bathymetry inversion. Remote Sens (Basel). 2022 a;14(5): 1127. 10.3390/rs 14051127 · doi ↗
- 4Alevizos E Oikonomou D Argyriou AV : Fusion of drone-based RGB and multi-spectral imagery for shallow water bathymetry inversion. Remote Sens (Basel). 2022 b;14(5): 1127. 10.3390/rs 14051127 · doi ↗
- 5Althaus F Hill N Ferrari R : A standardised vocabulary for identifying benthic biota and substrata from underwater imagery: the CATAMI classification scheme. P Lo S One. 2015;10(10): e 0141039. 10.1371/journal.pone.0141039 26509918 PMC 4625050 · doi ↗ · pubmed ↗
- 6Angeletti L Bargain A Campiani E : Cold-water coral habitat mapping in the mediterranean sea: methodologies and perspectives. In: Coral Reefs of the World. Springer,2019;173–189. 10.1007/978-3-319-91608-8_16 · doi ↗
- 7Arosio R Gafeira J De Clippele LH : Co M Ma: a GIS geomorphometry toolbox to map and measure confined landforms. Geomorphology. 2024;458: 109227. 10.1016/j.geomorph.2024.109227 · doi ↗
- 8Assis J Fernández Bejarano SJ Salazar VW : Bio-ORACLE v 3.0. pushing marine data layers to the CMIP 6 Earth system models of climate change research. Glob Ecol Biogeogr. 2024;33(4): e 13813. 10.1111/geb.13813 · doi ↗