SpikeAEC: a neuromodulation-based spiking controller for explore-exploit balancing in mobile robots
Canyang Liu, Yichen Liu, Yongqi Zhou, Buqin Su

TL;DR
This paper introduces SpikeAEC, a brain-inspired robot controller that improves exploration and exploitation balance using spiking neural networks.
Contribution
SpikeAEC introduces a neuromodulated spiking architecture that outperforms existing methods in robot control tasks.
Findings
SpikeAEC converges 24% faster than leading brain-inspired methods.
It reduces trajectory length by 18% and increases cumulative reward by over 5%.
The design maintains consistency with neurophysiological principles.
Abstract
Balancing exploration and exploitation remains a fundamental challenge in reliable mobile robot control, as conventional policies often converge on suboptimal behaviors. Inspired by the brain's division of labor for adaptive control, we propose SpikeAEC, a fully spiking, neuromodulated Actor-Explorer-Critic architecture designed to address this dilemma online within a closed-loop system. SpikeAEC comprises three specialized subnetworks operating in parallel: the Actor, inspired by the basal ganglia, proposes exploitative actions; the Explorer, modeled after the ACC-GPe-STN pathway, generates adaptive exploratory actions gated by a vigilance signal modulated by the accumulated global temporal-difference (TD) error; and the Critic, based on the ventral striatum, computes the TD error. The final action is selected by a separate, TAN-based Arbitrator, which probabilistically chooses between…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
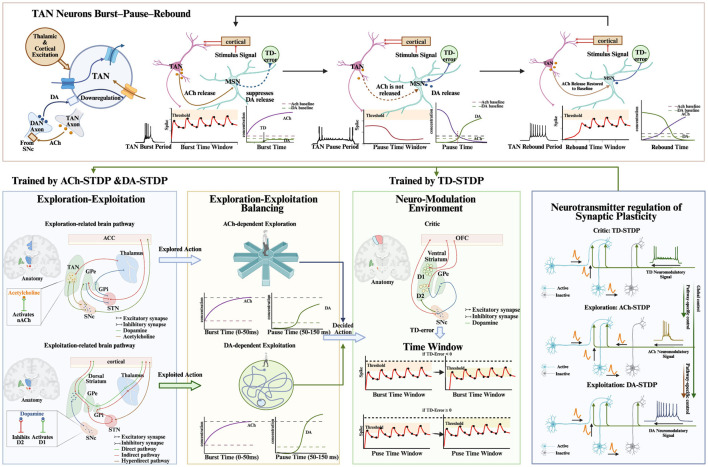 Figure 1
Figure 1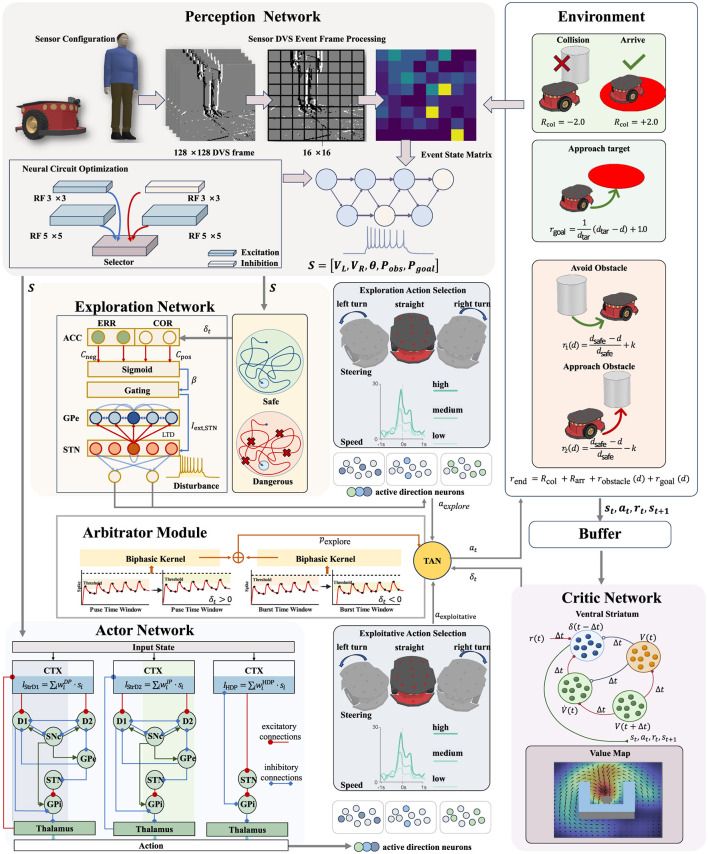 Figure 2
Figure 2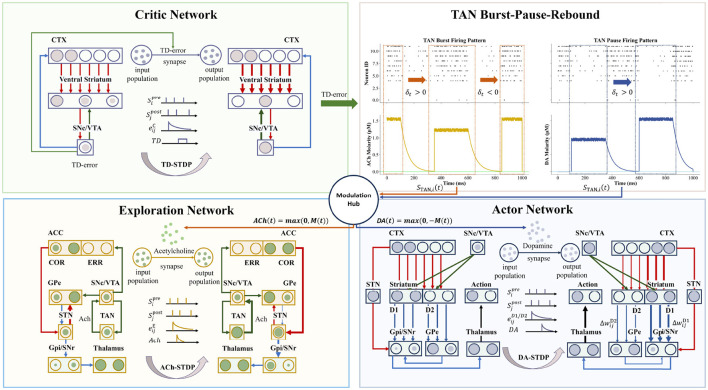 Figure 3
Figure 3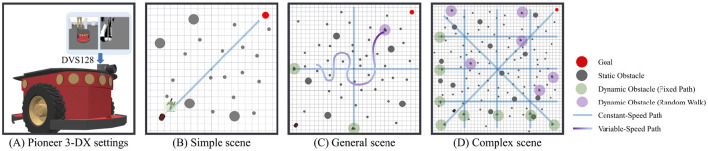 Figure 4
Figure 4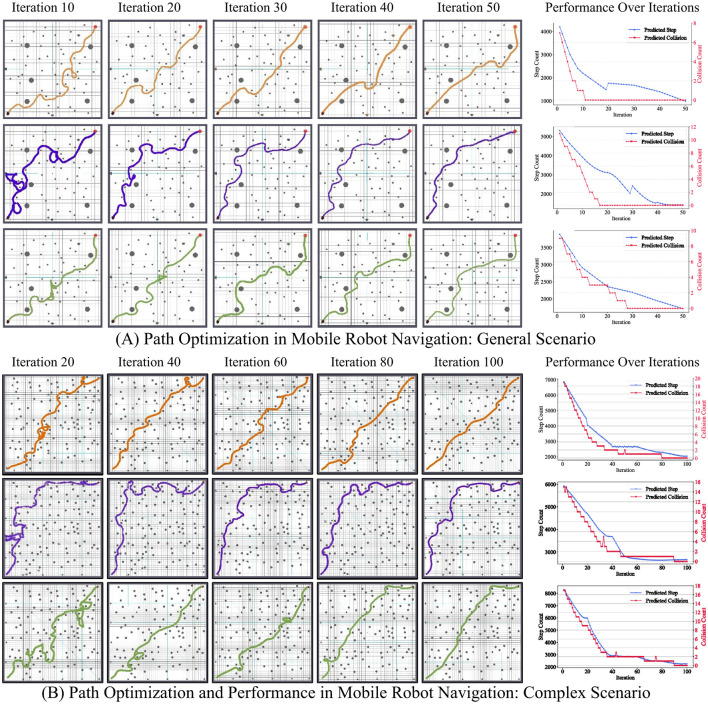 Figure 5
Figure 5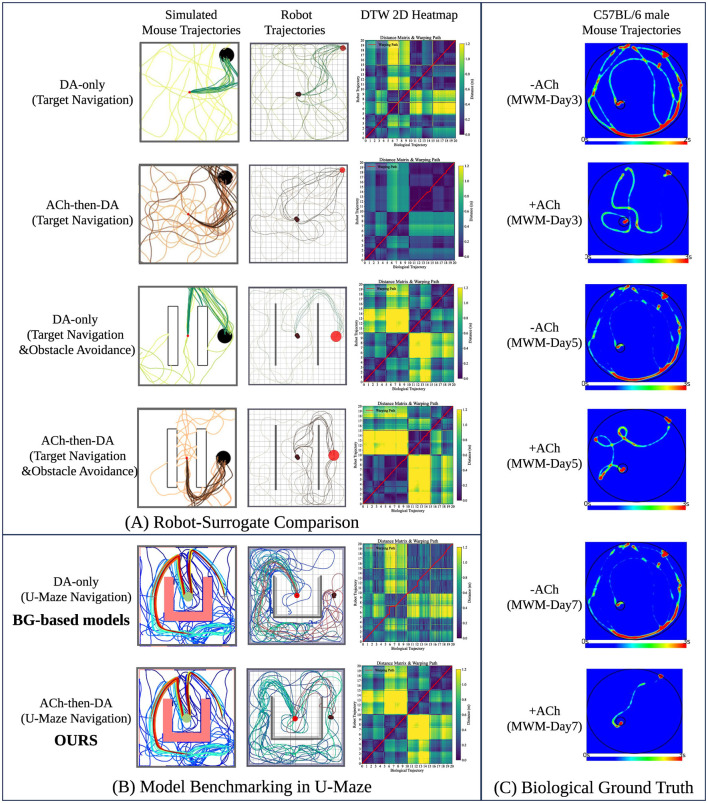 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsReinforcement Learning in Robotics · EEG and Brain-Computer Interfaces · Neurological disorders and treatments