A flexible automated magnetic microrobot assembly system
Oliver J. Shindell, Aaron C. Davis, David J. Cappelleri

TL;DR
This paper introduces a system for automatically assembling microrobots with magnets and sealed drug compartments, aiming to enable mass production for medical applications.
Contribution
A novel automated system for assembling microrobots with embedded magnets and sealed drug compartments is developed.
Findings
The system assembles a drug delivery robot in 192.77±48.28 seconds.
100% of wax seals were hermetic with an average thickness of 302±25 µm.
The system enables precise magnet assembly using vision-based feedback.
Abstract
This paper presents a novel system for flexible automated fabrication of microrobots with embedded permanent magnets, and for the loading of liquid therapeutic drugs and sealing with thermally sensitive wax. Microrobots featuring embedded magnets are more controllable and observable, and are capable of tasks requiring higher forces. In this system, a micromanipulator controls tweezers, and stepper motors actuate a four-stage system that executes different assembly steps. A syringe pump is used to fill drug delivery microrobots, and a wax seal is applied with a brush made from heated copper wires. This brush is capable of efficiently applying an even wax coating to drug delivery robots, sealing the contained therapeutics inside. Vision-based feedback from an overhead microscope camera ensures precise embedded magnet assembly through a combination of image processing algorithms. A single…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
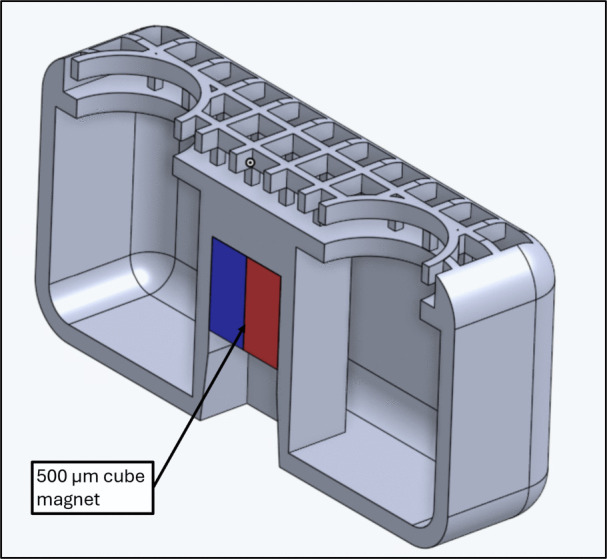 Figure 10
Figure 10 Figure 11
Figure 11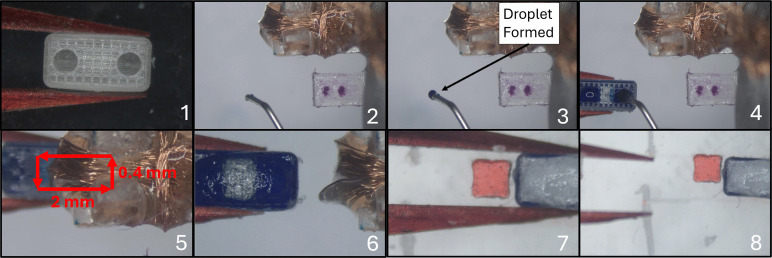 Figure 12
Figure 12 Figure 13
Figure 13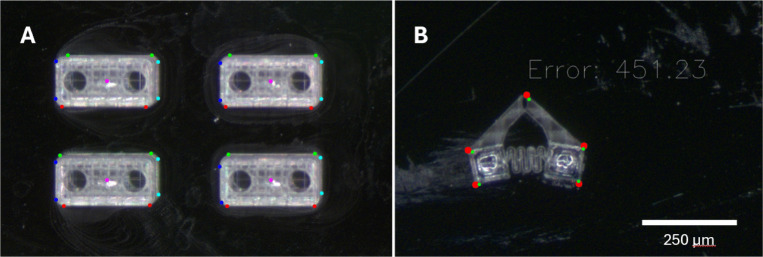 Figure 14
Figure 14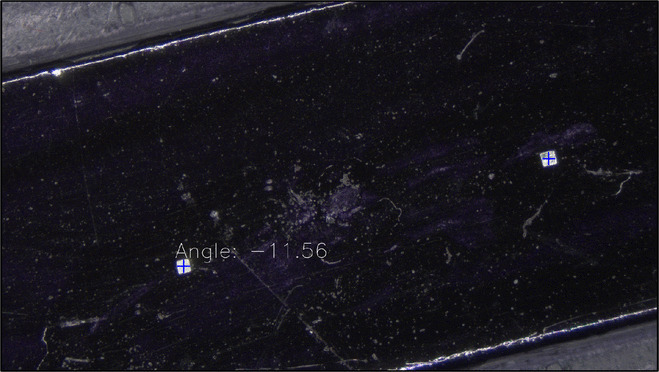 Figure 15
Figure 15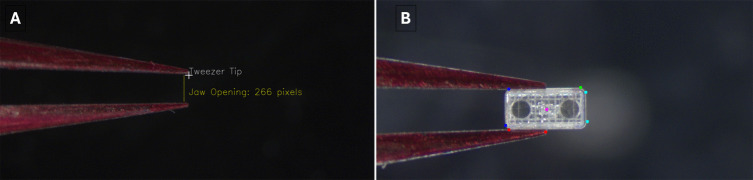 Figure 16
Figure 16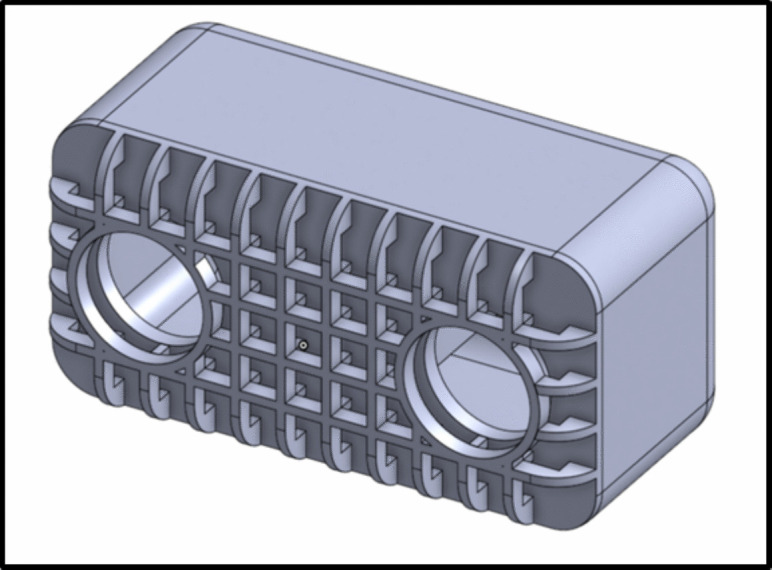 Figure 17
Figure 17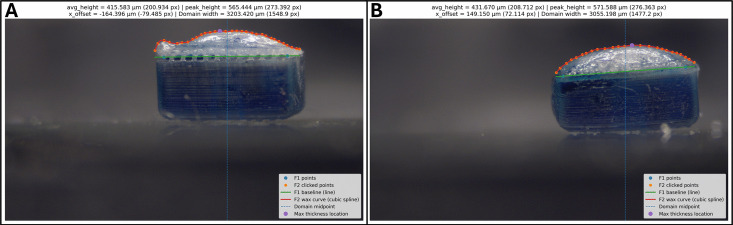 Figure 18
Figure 18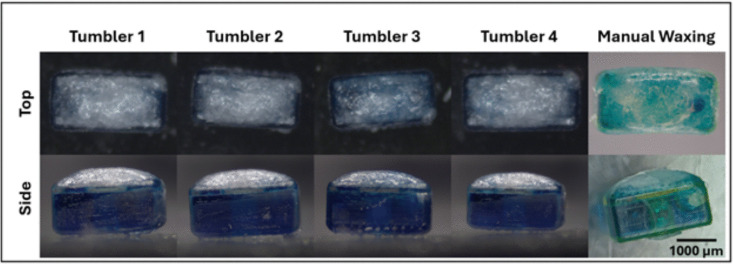 Figure 19
Figure 19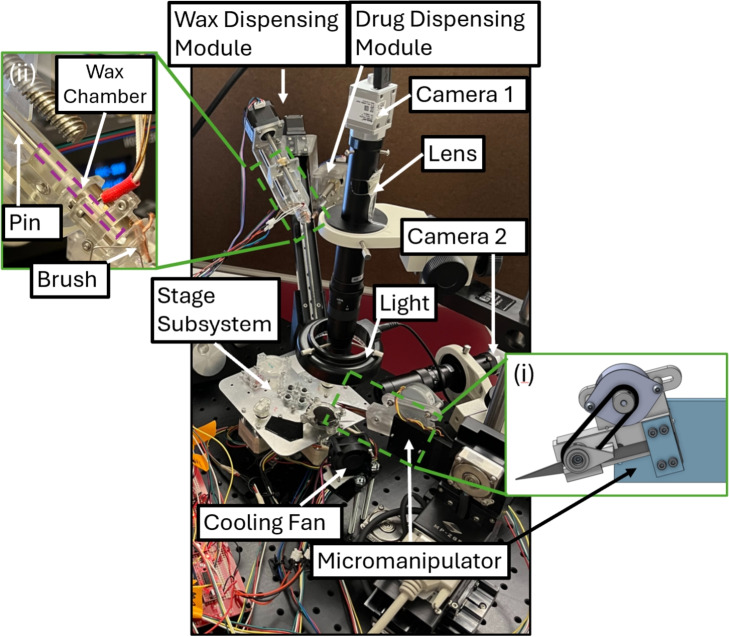 Figure 1
Figure 1 Figure 20
Figure 20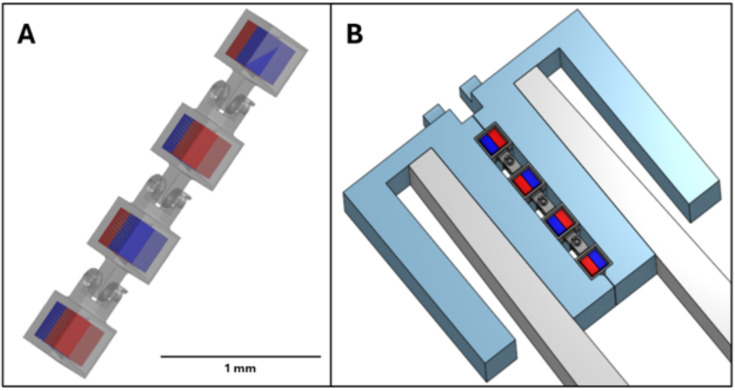 Figure 21
Figure 21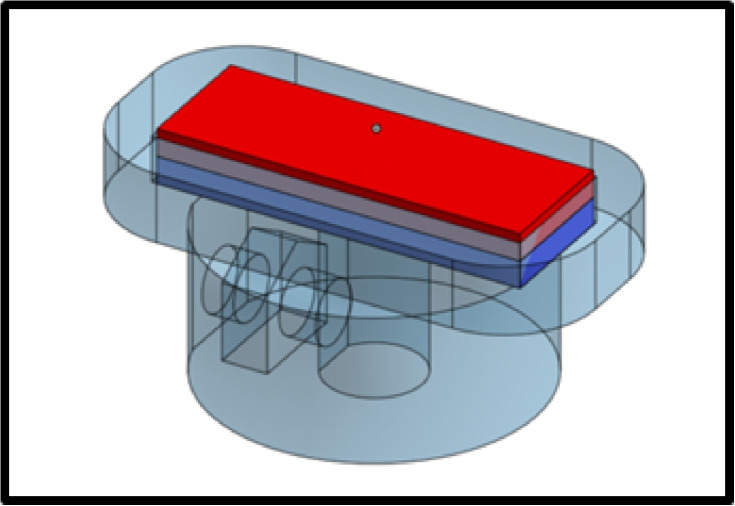 Figure 22
Figure 22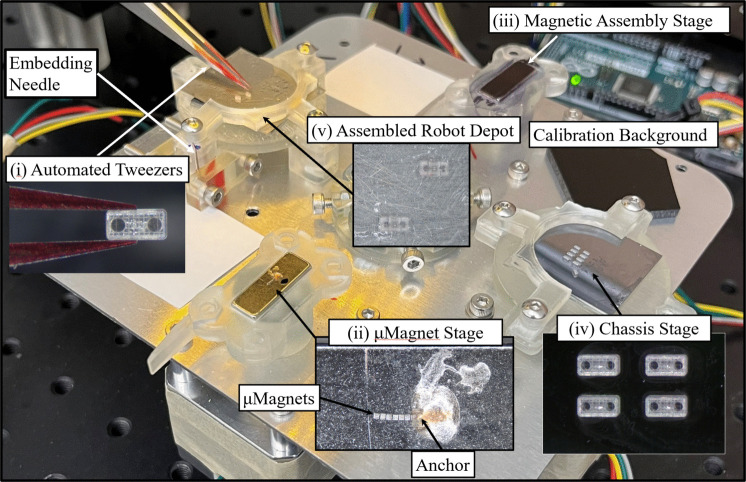 Figure 2
Figure 2 Figure 3
Figure 3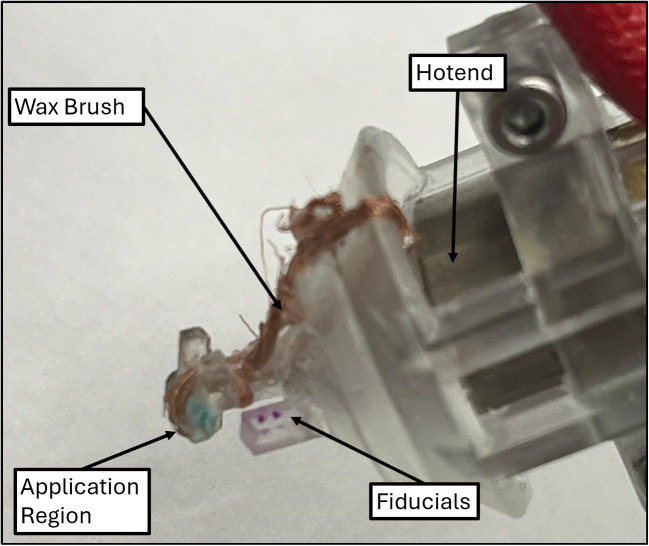 Figure 4
Figure 4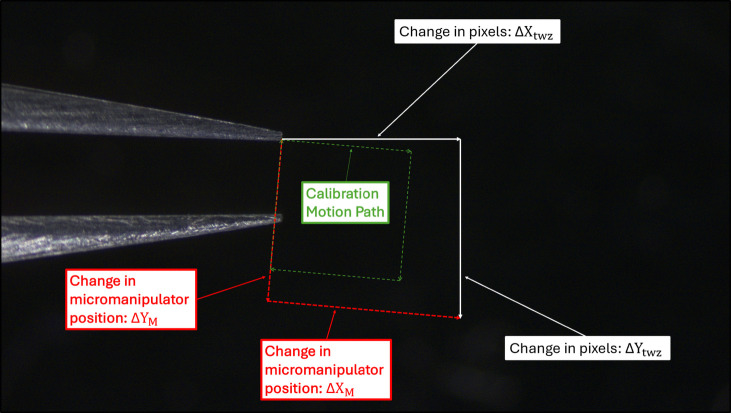 Figure 5
Figure 5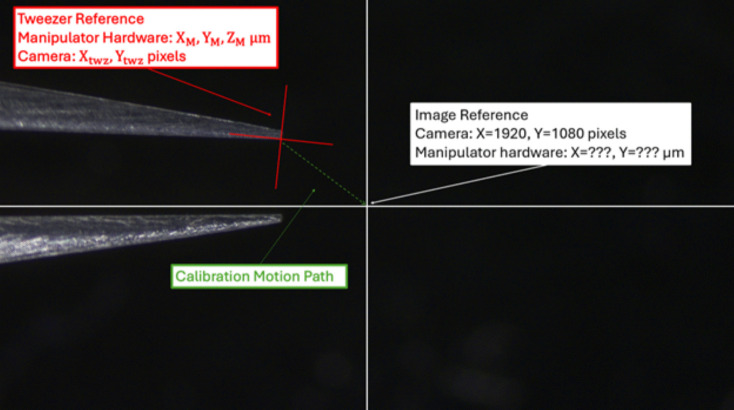 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMicro and Nano Robotics · Soft Robotics and Applications · Piezoelectric Actuators and Control