Robust place recognition under illumination changes using pseudo-LiDAR from omnidirectional images
Juan José Cabrera, Marcos Alfaro, Arturo Gil, Oscar Reinoso, Luis Payá

TL;DR
This paper introduces a new method for visual place recognition that is robust to changes in lighting by using pseudo-LiDAR data from depth maps.
Contribution
The novel framework uses depth estimation and pseudo-LiDAR to improve VPR robustness under illumination changes and different camera types.
Findings
The system performs well across diverse lighting conditions despite being trained only under cloudy conditions.
The approach generalizes to geometrically dissimilar inputs and different camera types.
Pseudo-LiDAR from standard cameras offers a cost-effective alternative to 3D sensors for VPR.
Abstract
Visual Place Recognition (VPR) systems typically exhibit reduced robustness when subjected to changes in scene appearance produced by illumination dynamics or heterogeneity across different types of visual sensors. This paper proposes a novel framework that exploits depth estimation techniques to overcome these challenges. Our approach transforms omnidirectional images into depth maps using Distill Any Depth, a state-of-the-art depth estimator based on Depth Anything V2. These depth maps are then converted into pseudo-LiDAR point clouds, which serve as input to the MinkUNeXt architecture, which generates global-appearance descriptors. A key innovation lies in our novel data augmentation technique that exploits different distilled variants of depth estimation models to enhance robustness across varying conditions. Despite training with a limited set of images captured only under cloudy…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
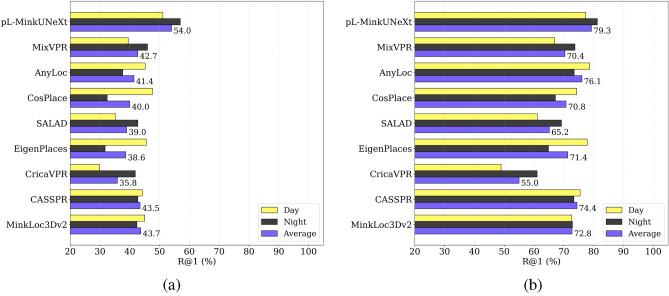 Figure 10
Figure 10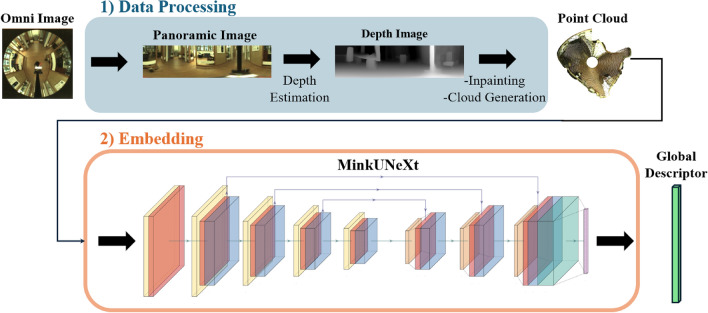 Figure 1
Figure 1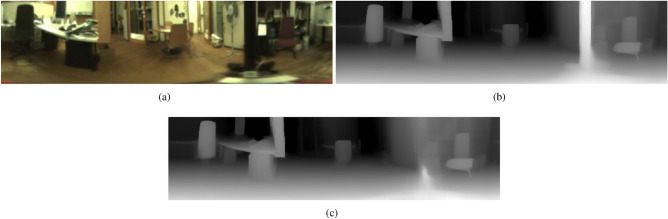 Figure 2
Figure 2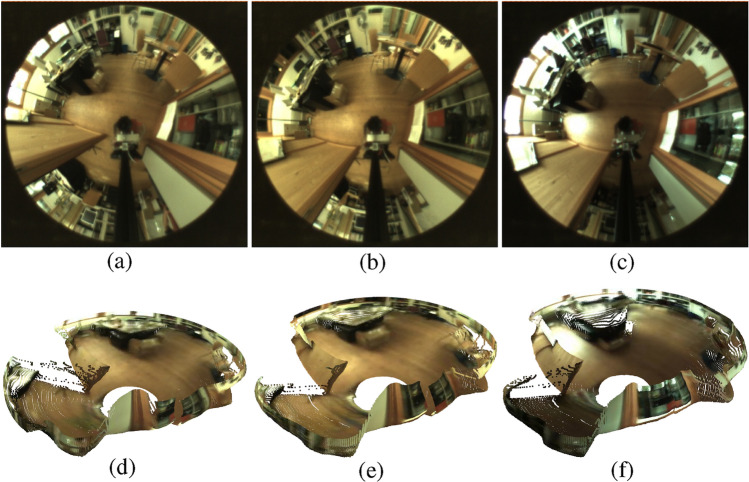 Figure 3
Figure 3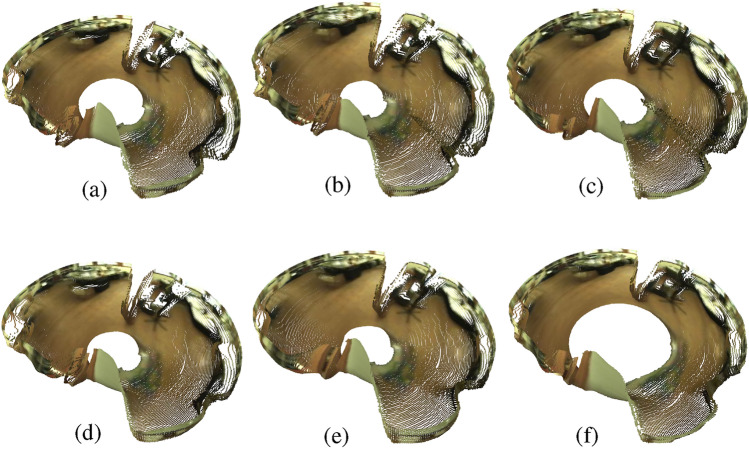 Figure 4
Figure 4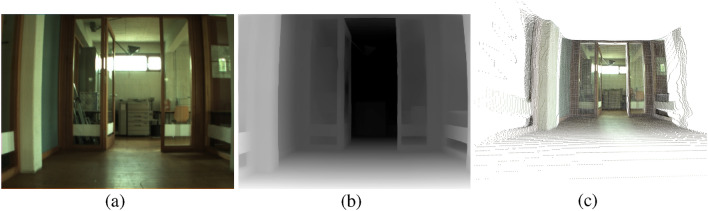 Figure 5
Figure 5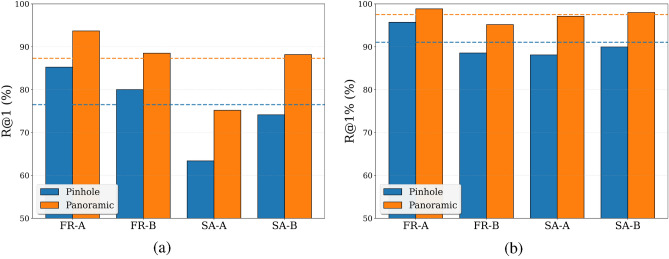 Figure 6
Figure 6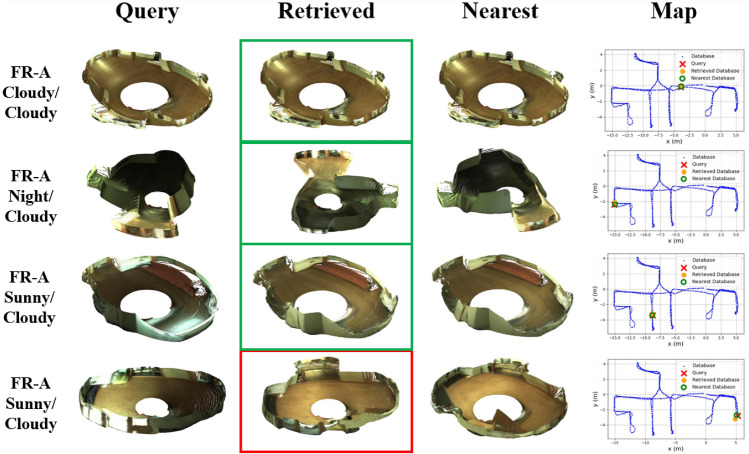 Figure 7
Figure 7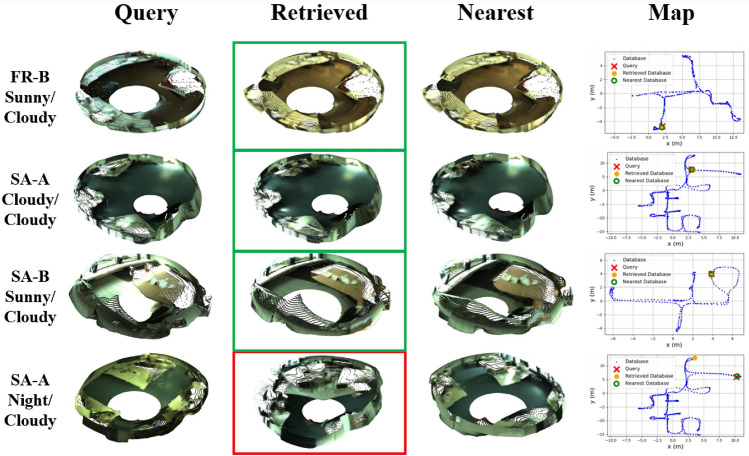 Figure 8
Figure 8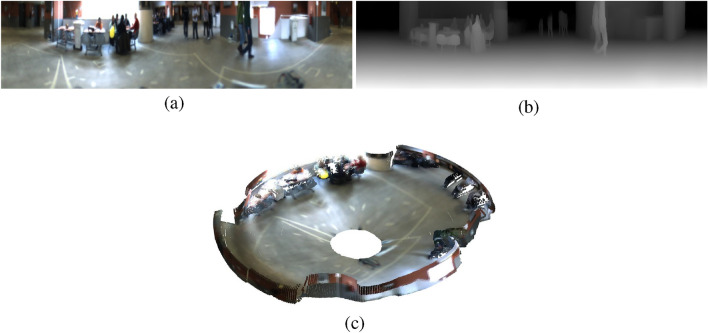 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Advanced Image and Video Retrieval Techniques