Functional sufficiency in VR: achieving non-corporeal embodiment
Malcolm Wright, Olivia Petit, Alexander Schnack

TL;DR
This paper introduces a new way to understand how people feel embodied in virtual reality, focusing on functional elements rather than physical similarity.
Contribution
The paper presents a functionalist model of embodiment in VR, defining it through perception–action loops rather than anatomical mimicry.
Findings
Behavioral and emotional outcomes remain stable when key functional elements are preserved despite different locomotion methods.
Functional sufficiency in VR is determined by the integrity of the perception–action loop.
The model offers testable predictions for when virtual experiences will have cognitive and emotional effects.
Abstract
This article provides a novel functionalist account of embodiment in immersive virtual environments, grounded in a formal model of cognition, supported by past empirical evidence, and offering a testable framework for predicting when virtual experiences will produce cognitive and emotional effects. Our approach complements existing work on telepresence and subjective experience by applying the Thin Model as an intermediate theory linking interface affordances to perception, emotion, and behavior. Drawing on previously published immersive virtual reality studies, we show that when key functional elements - such as sensing, recognition, inspection, and feedback - are preserved, behavioral and emotional outcomes remain stable even when locomotion mechanisms differ. These findings support a criterion of functional sufficiency for embodiment where interface substitution leaves core policies…
Click any figure to enlarge with its caption.
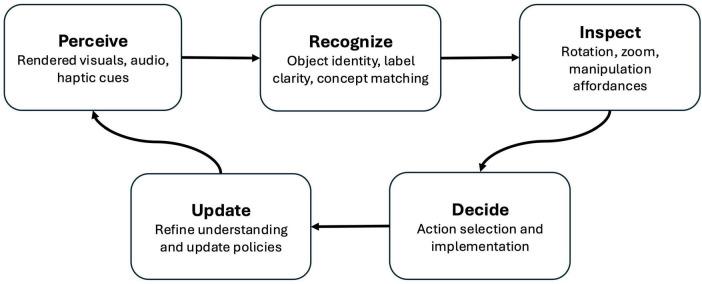 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsVirtual Reality Applications and Impacts · Action Observation and Synchronization · Social Robot Interaction and HRI