Adaptive multi-mode locomotion for bipedal wheel-legged robots via sparse mixture-of-experts deep reinforcement learning
Pan He, Zeang Zhao, Shengyu Duan, Panding Wang, Hongshuai Lei

TL;DR
This paper introduces a new control framework for bipedal wheel-legged robots using reinforcement learning to smoothly switch between wheel and leg movement.
Contribution
A novel MoE-based reinforcement learning framework with sparse activation for adaptive multi-mode locomotion in bipedal wheel-legged robots.
Findings
The MoE-enhanced algorithm shows improved training stability and higher rewards compared to single-network PPO.
The robot successfully transitions between rolling and leg-lifting gaits depending on terrain.
The method achieves a higher success rate in navigating diverse terrains.
Abstract
The bipedal wheel-legged robot combines the high energy efficiency of wheeled movement with the terrain adaptability of legged locomotion. However, achieving a smooth transition between these two heterogeneous motion modes within a unified control framework remains challenging. This study proposes a reinforcement learning control framework that integrates the Mixture of Experts (MoE) architecture. This approach employs a “divide and conquer” strategy by introducing a dynamic gating network and a Top-K sparse activation mechanism, which automatically allocates different motion modes to specific expert subnetworks, effectively decoupling conflicting gradients. Simulation results demonstrate that, compared to the single-network PPO method, the MoE-enhanced algorithm exhibits significant improvements in training stability and rewards. The learned policy successfully achieved smooth rolling…
Click any figure to enlarge with its caption.
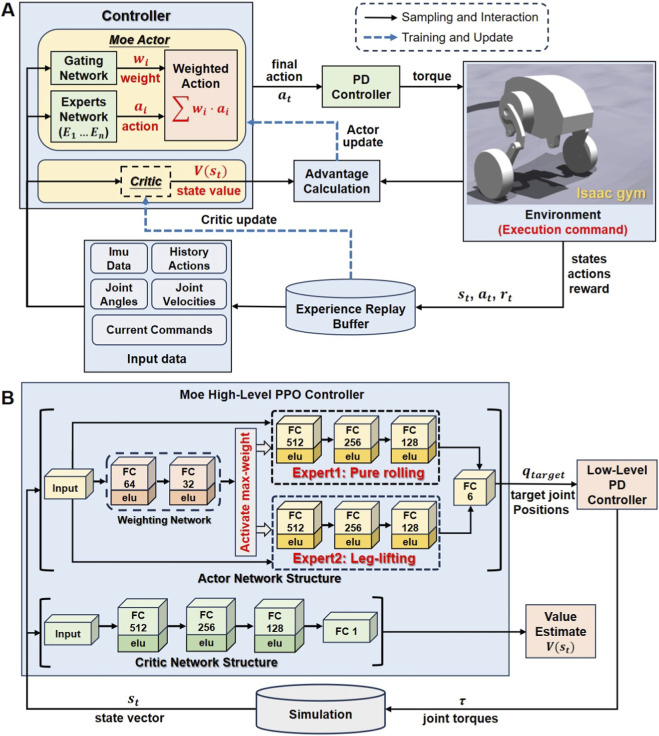 Figure 1
Figure 1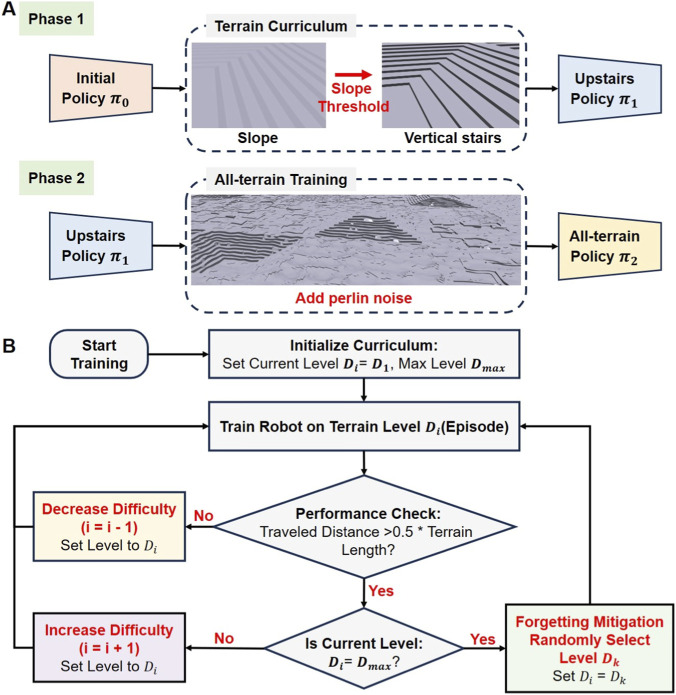 Figure 2
Figure 2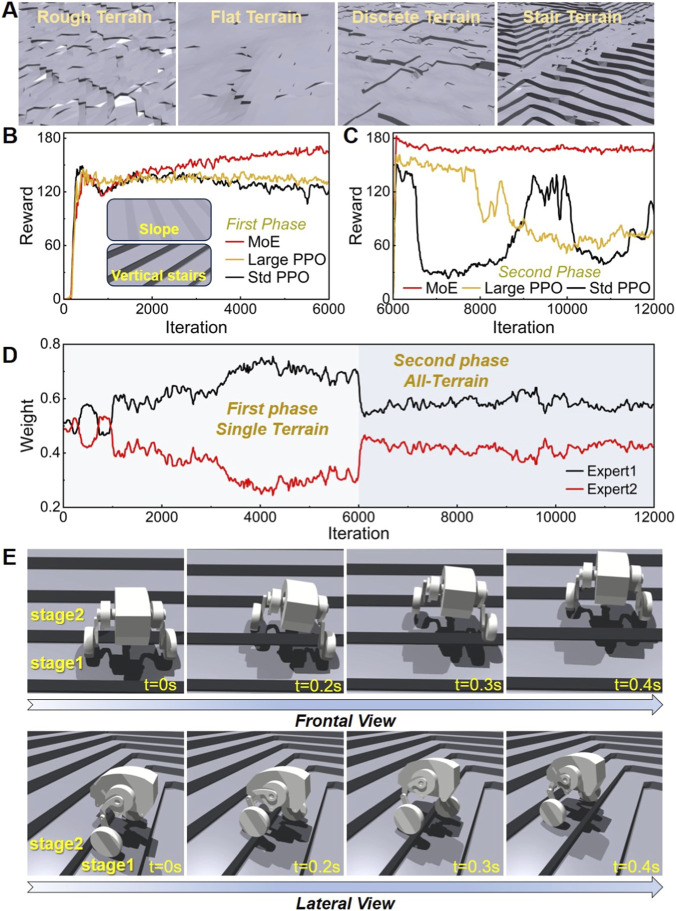 Figure 3
Figure 3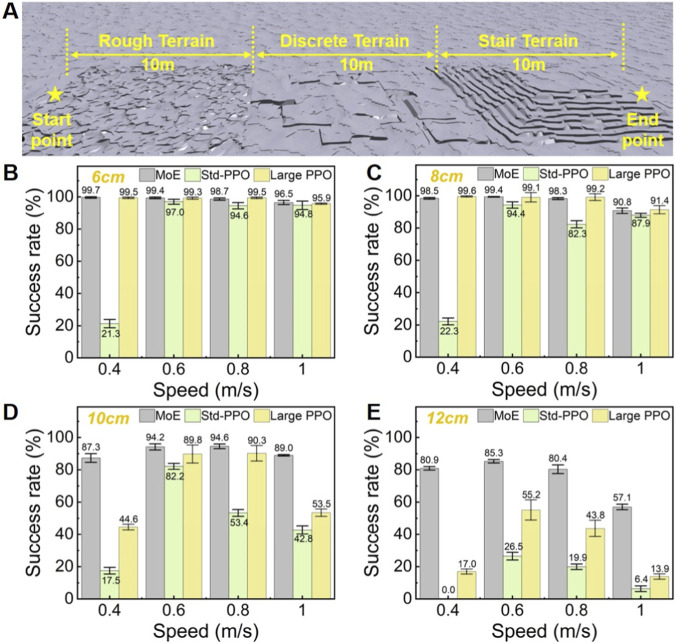 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Zebrafish Biomedical Research Applications