A field-acquired RGB–Depth image dataset for computer vision-based baby broccoli detection and size estimation under varying illumination conditions
Rizan Mohamed, Gayan Kahandawa Appuhamillage, Joarder Kamruzzaman, Alexandra Keith, Linh Nguyen

TL;DR
This paper introduces a dataset of RGB-Depth images of baby broccoli plants collected in the field under different lighting conditions to support agricultural computer vision research.
Contribution
The paper presents a novel, publicly available RGB–Depth image dataset for baby broccoli detection and size estimation under varying illumination.
Findings
The dataset includes 1759 high-quality RGB–Depth image pairs collected in commercial baby broccoli farms.
It supports research in computer vision for crop detection, segmentation, and size estimation under natural and artificial lighting.
The dataset includes camera parameters and depth maps for 3D point cloud reconstruction.
Abstract
This data article describes a curated RGB–Depth image dataset captured using an Intel RealSense D435 stereo depth camera mounted on an autonomous mobile platform during field deployments at commercial baby broccoli farms in Victoria, Australia. The dataset comprises 1759 paired RGB images (640 × 480 pixels) and corresponding 16-bit depth frames acquired under both daytime (natural sunlight) and night-time (LED illumination) conditions, designed to support research in agricultural computer vision and robotic harvesting. Images were selected from 39,765 raw acquisitions through a reproducible Python curation pipeline applying quality filtering (blur detection, brightness thresholds, corruption detection), perceptual hash-based duplicate removal, and manual review. The final dataset includes 924 daytime and 835 night-time image pairs containing baby broccoli plants at various growth…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1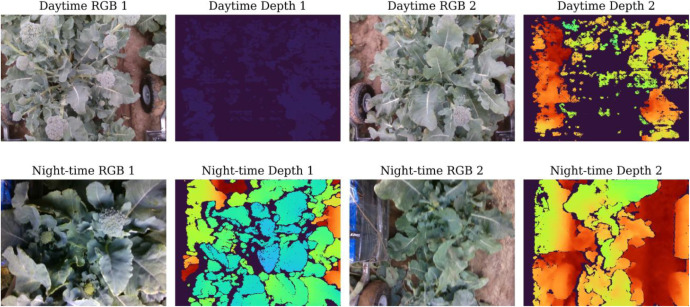 Figure 2
Figure 2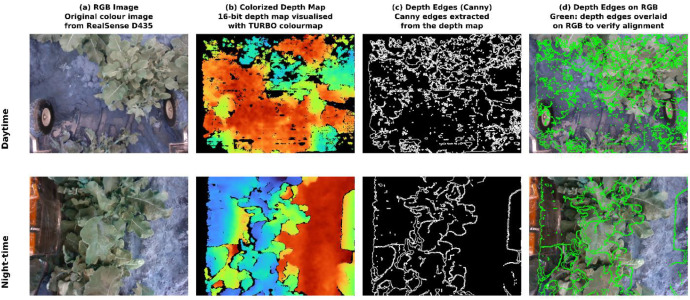 Figure 3
Figure 3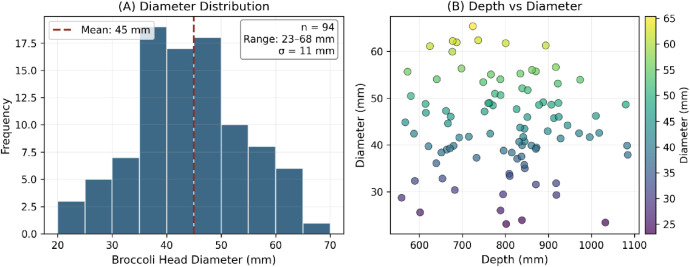 Figure 4
Figure 4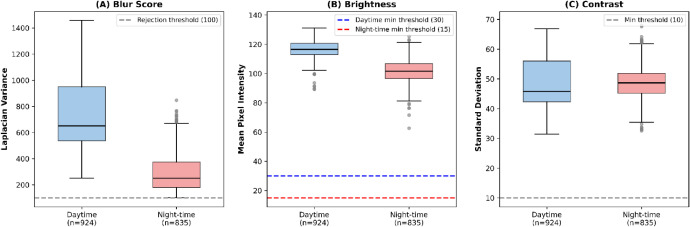 Figure 5
Figure 5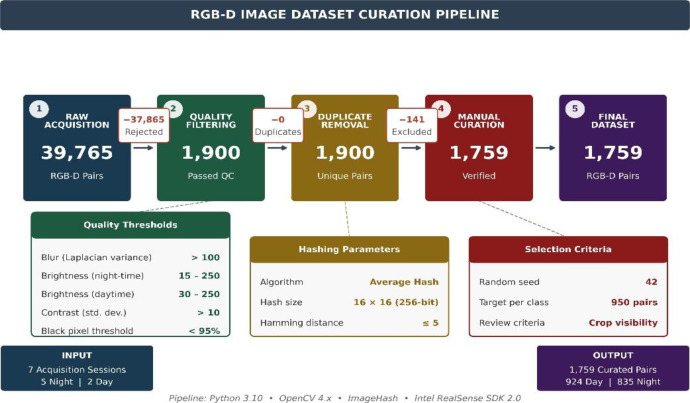 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSmart Agriculture and AI · Remote Sensing in Agriculture · Plant Surface Properties and Treatments
Specifications TableSubjectComputer SciencesSpecific subject areaRGB–Depth imaging for agricultural computer vision and robotic crop harvestingType of dataImage (RGB and depth maps), TableRaw and curated image files: 8-bit PNG (RGB), 16-bit PNG (depth maps)Data collectionRGB and depth images were captured using an Intel RealSense D435 camera (640 × 480 pixel resolution, 87° × 58° field of view, 0.2–2.0 m depth range, 50 mm stereo baseline) mounted on a custom autonomous mobile rover during December 2025. Data collection occurred under daytime (natural sunlight) and night-time (LED illumination at 2000–3000 lx) conditions at commercial baby broccoli farms. A reproducible Python curation pipeline reduced 39,765 raw frames to 1759 representative pairs through quality filtering, duplicate removal, and manual review.Data source locationInstitution: Federation University Australia and Bulmer FarmsRegion: Gippsland, Victoria, AustraliaCountry: AustraliaLatitude and longitude: Approximately −37.8°S, 147.4°ECollection period: December 2025Data accessibilityRepository name: Mendeley DataData identification number: 10.17632/px5p6zdk6k.3Direct URL to data: https://data.mendeley.com/datasets/px5p6zdk6k/3Related research articleNone
Value of the Data
1
- •The dataset provides paired RGB and depth images of baby broccoli plants captured under both daytime and night-time conditions, directly supporting development of illumination-robust harvesting systems for real-world operations where baby broccoli is harvested before sunrise (requiring artificial illumination) during summer to preserve freshness, and during both daylight and night-time hours in winter to meet production demands.
- •Researchers can use this dataset to develop and evaluate deep learning models for baby broccoli detection and segmentation tasks (using the 1759 image pairs for self-supervised learning or manual annotation), complementing recent advances in RGB–D-based broccoli maturity recognition [1].
- •The inclusion of depth information supports development of sensor fusion approaches and 3D spatial understanding algorithms for robotic crop manipulation.
- •A subset of 20 image sets with manual ground truth annotations (94 diameter measurements with corresponding depth values) provides a benchmark for validating and testing size estimation algorithms. Note: this ground truth subset is intended for algorithm validation and testing purposes; the sample size is not sufficient for training deep learning regression models.
- •The dataset addresses a gap in publicly available RGB–D datasets for specialty vegetable crops, particularly those requiring delicate handling where automated harvesting remains challenging, aligning with the growing role of computer vision and robotics in smart manufacturing systems [2].
- •The open-source Python curation pipeline enables full reproducibility and can be adapted for creating similar curated datasets from raw RGB–D acquisitions.
Background
2
The dataset was compiled to support research in autonomous harvesting of baby broccoli, where robust perception under varying illumination is critical. RGB–Depth sensing enables 3D understanding of crop geometry for detection and size estimation. Data were collected during real field operations to reflect practical harvesting conditions and to complement prior work on robotic end-effectors [3] and vision-based baby broccoli identification [4].
Data Description
3
The dataset consists of 1759 RGB–D image pairs divided into 924 daytime (52.5 %) and 835 night-time (47.5 %) samples. Fig. 1 shows the robotic rover mobile platform used for data collection.Fig. 1. Mobile data collection platform deployed in a commercial baby broccoli field, featuring an Intel RealSense D435 RGB–D camera, portable power station, onboard computing unit, and LED illumination for night-time operation.Fig 1 dummy alt text
Dataset organization
3.1
Files are organized into a hierarchical folder structure as shown in Table 1[5]. Each RGB image has a corresponding depth image with matching index numbers (e.g., night_rgb_0001.png pairs with night_depth_0001.png).Table 1. Dataset folder structure and specifications.Table 1 dummy alt textFolder/FileDescription/nighttime_rgb/835 night-time RGB images (8-bit PNG, 640 × 480)/nighttime_depth/835 night-time depth maps (16-bit PNG, values in mm)/daytime_rgb/924 daytime RGB images (8-bit PNG, 640 × 480)/daytime_depth/924 daytime depth maps (16-bit PNG, values in mm)/annotated_dimensions_validation_only/20 image sets with 94 ground truth diameter annotations (RGB, depth, annotated PNG, JSON metadata)manual_curation_criteria.txtManual curation exclusion and inclusion criteria used during visual review stagecamera_intrinsics.jsonRGB camera intrinsic calibration parameterscurate_rgbd_dataset.pyPython curation pipeline script for dataset filtering and selectionrgbd_curation_report.txtCuration report with parameters and statisticsCamera: Intel RealSense D435, 50 mm baseline, 87° × 58° FOV, 0.2–2.0 m range.Total size: ∼1.1 GB.
The standard PNG format and sequential naming convention ensure direct compatibility with common annotation tools such as CVAT, LabelImg, and Label Studio, enabling researchers to generate bounding boxes or segmentation masks without format conversion.
Camera intrinsics and depth alignment
3.2
The dataset includes the RGB camera intrinsic calibration parameters in Table 2 required for converting 2D depth maps into 3D metric point clouds. The intrinsic matrix for the Intel RealSense D435 RGB camera used during data acquisition (at 640 × 480 resolution) is provided in the file camera_intrinsics.json with the following parameters:Table 2RGB camera intrinsic parameters.Table 2 dummy alt textParameterValueFocal length 612.3895 pixelsFocal length 611.5399 pixelsPrincipal point 331.8402 pixelsPrincipal point 252.8850 pixelsResolution640 480 pixelsDistortion modelInverse Brown-Conrady
Important: All depth maps in this dataset have been aligned (registered) to the RGB camera’s field of view using the Intel RealSense SDK’s rs2::align function. This means the depth and RGB images correspond pixel-for-pixel—the depth value at pixel in the depth image corresponds directly to the same pixel location in the RGB image. Users can convert any pixel with coordinates and depth value (in mm) to 3D camera coordinates using the standard pinhole camera model:
Sample images
3.3
Representative RGB–D image pairs are shown in Fig. 2. Daytime images exhibit natural sunlight illumination while night-time images show characteristic artificial LED lighting. Depth maps are colorized using the TURBO colormap where warmer colors indicate closer distances. Note that raw 16-bit depth images appear nearly black when viewed in standard image viewers, as depth values (typically 200–2000 mm) occupy a small portion of the 16-bit range (0–65,535); normalization or colormap application is required for visualization and algorithmic processing.Fig. 2. Representative RGB–D samples from the dataset. Top row: daytime acquisitions under natural sunlight showing RGB images and colorized depth maps. Bottom row: night-time acquisitions under artificial LED illumination. Baby broccoli plants at various growth stages are visible with corresponding depth gradients.Fig 2 dummy alt text
To verify the quality of depth-to-RGB alignment, Canny edge maps were extracted from the aligned depth frames and overlaid onto corresponding RGB images. Fig. 3 presents this verification for one daytime and one night-time pair selected for high depth completeness. The overlays confirm that depth edges consistently trace along plant boundaries and structural features visible in the RGB images, with no observable systematic offset.Fig. 3. Depth-to-RGB alignment verification for representative daytime (top) and night-time (bottom) image pairs. (a) Original RGB image. (b) Colorized depth map (invalid pixels shown in black). (c) Canny edge map extracted from the depth image. (d) Depth edges (green) overlaid on the RGB image, demonstrating that depth discontinuities align with visible object boundaries, confirming pixel-level registration via the rs2::align function.Fig 3 dummy alt text
Ground truth annotations
3.4
A subset of 20 image sets includes manual ground truth annotations for broccoli head diameter estimation, comprising 94 point measurements with pixel coordinates, measured diameters (mm), and corresponding depth values (mm). Fig. 4 summarizes the annotation characteristics. Each annotated set contains four files: clean RGB image, depth map, annotated visualization, and JSON metadata with measurement details.Fig. 4. Ground truth annotation summary. (A) Distribution of manually measured broccoli head diameters showing range of 23–68 mm with mean 45 mm. (B) Scatter plot illustrating measurement coverage across the operational depth range (554–1087 mm).Fig 4 dummy alt text
Table 3 summarizes the ground truth annotation subset characteristics.Table 3. Ground truth annotation summary statistics.Table 3 dummy alt textParameterValueImage sets20Total annotations94Annotations/image3–5Diameter range23–68 mmDiameter mean SD45 11 mmDepth range554–1087 mmDepth mean800 mmImage resolution640 480 pxFormatPNG + JSON
Quality metrics
3.5
Fig. 5 presents the distribution of image quality metrics between daytime and night-time subsets. Daytime images exhibit higher blur scores (mean Laplacian variance: 721.4 vs. 291.2), indicating sharper images likely due to better illumination enabling shorter exposure times. Night-time images show lower brightness (mean intensity: 102.2 vs. 116.5) but comparable contrast (std. deviation: 48.7 vs. 46.9), illustrating that LED illumination provides adequate scene visibility for image capture. Depth measurements cluster between 0.3–1.5 m, consistent with the camera mounting height (∼0.8 m) and crop canopy structure.Fig. 5. Box plot comparison of quality metrics between daytime and night-time images in the curated dataset. (A) Blur score measured as Laplacian variance—higher values indicate sharper images; the grey dashed line indicates the rejection threshold of 100, below which images were discarded as blurry. (B) Mean pixel intensity (brightness); dashed lines indicate minimum brightness thresholds: 15 for night-time images (red) and 30 for daytime images (blue), accommodating the inherently lower brightness of LED-illuminated night-time acquisitions. (C) Image contrast measured as standard deviation of pixel intensities. The grey dashed line indicates the minimum contrast threshold of 10.Fig 5 dummy alt text
At the operational depth range of 0.5–1.1 m, the D435′s 50 mm stereo baseline yields a theoretical depth error of approximately ±2–6 mm, which is within acceptable tolerance for broccoli head size estimation (diameters: 23–68 mm).
Depth map completeness is summarised in Table 4 across both illumination conditions. Daytime images exhibit substantially higher rates of invalid (zero-valued) depth pixels (mean: 62.2 %) compared to night-time images (mean: 24.1 %). This disparity is consistent with well-documented infrared interference from direct sunlight on structured-light stereo sensors. No depth-specific post-processing filters were applied during capture or curation, preserving raw depth measurements for researchers to apply their own filtering or completion strategies. Despite the higher invalid pixel rates in daytime frames, regions of primary interest — broccoli heads at operating distances of 0.3–1.0 m — generally retain valid depth values, as the sensor performs best at close range on diffuse, textured surfaces.Table 4. Depth completeness comparison between daytime and night-time subsets.Table 4 dummy alt textMetricDaytime (n = 924)Nighttime (n = 835)Mean invalid pixels ( %)62.224.1Median invalid pixels ( %)60.923.8Std. deviation ( %)11.54.8Min ( %)28.013.2Max ( %)88.641.2
Experimental Design, Materials and Methods
4
Data acquisition
4.1
RGB–D sensing combines color imagery with depth information to enable 3D perception for agricultural robotics applications [6]. Data were acquired using an Intel RealSense D435 RGB–D camera, which has been successfully deployed in various agricultural monitoring tasks [7], mounted on a custom autonomous mobile rover (Fig. 1). The platform comprised an aluminum-frame wheeled chassis, portable lithium power station (1000 Wh), onboard computing unit running Ubuntu, and adjustable LED array for night-time illumination. The camera was mounted at approximately 0.8 m height, oriented downward toward the crop canopy.
Data collection was conducted at Bulmer Farms in Gippsland, Victoria, Australia during December 2025. Daytime collection occurred under natural sunlight, while night-time collection used LED illumination (2000–3000 lx) after sunset. Multiple acquisition sessions, each defined as a single rover traversal of one crop row, yielded 39,765 raw RGB–D pairs (33,823 night-time from 5 row traversals; 5942 daytime from 2 row traversals conducted in late morning and late afternoon to capture varying solar angles).
Ground truth annotation
4.2
Ground truth diameter measurements were collected for a subset of 20 image sets to enable validation of automated size estimation algorithms. The annotation process employed a two-stage methodology combining digital marking with physical measurement to ensure accuracy.
A custom annotation software tool was developed in Python to facilitate precise marking of broccoli head locations in RGB images. The software displays synchronized RGB and depth image pairs, allowing annotators to click on individual broccoli heads to record pixel coordinates. For each marked point, the software automatically extracts the corresponding depth value from the aligned depth map and stores annotations in structured JSON format including pixel coordinates (x, y), depth value (mm), and a unique identifier for each measurement.
Physical diameter measurements were obtained using a digital vernier caliper (±0.01 mm resolution) during field data collection sessions. For each annotated broccoli head, the maximum crown diameter was measured by positioning the caliper jaws at the widest point of the floret head. Measurements were recorded immediately following image capture to minimize temporal variation due to plant growth or environmental changes. Each image set contains 3–5 annotated broccoli heads, yielding 94 total diameter measurements across the 20 annotated sets.
The resulting annotations provide paired ground truth data linking image-space coordinates with physical measurements, enabling researchers to develop and validate depth-based size estimation algorithms. The annotation software source code is included in the repository to support reproducibility and adaptation for similar annotation tasks.
Data curation pipeline
4.3
A Python-based curation pipeline was developed to select high-quality, non-redundant image pairs. The pipeline in Fig. 6 is provided as open-source code for full reproducibility. The high reduction ratio (39,765 to 1759 pairs) reflects the continuous frame capture during slow platform traversal, resulting in substantial near-duplicate imagery that was systematically removed to ensure dataset diversity.Fig. 6. Data curation pipeline flowchart showing progressive filtering from 39,765 raw acquisitions to 1759 final image pairs.Fig 6 dummy alt text
The pipeline performs four stages:
- (1)Quality filtering—images are assessed for blur (Laplacian variance *>*100), brightness (15–250 for night-time, 30–250 for daytime), contrast (std. dev. *>10), and corruption (<*95 % black pixels)
- (2)Duplicate removal—perceptual hashing (16 × 16 average hash) identifies near-duplicates (Hamming distance ≤5), retaining one per cluster
- (3)Random selection—950 pairs per illumination condition selected using fixed seed (42)
- (4)Manual curation—visual inspection removes frames with insufficient broccoli content or quality issues. Manual review (first author reviewed, supervisors validated) was limited to exclusion of frames with insufficient crop visibility or severe acquisition artefacts and did not involve subjective labeling or interpretation. Table 5 summarizes the curation results.Table 5. Data curation pipeline results.Table 5 dummy alt textStageCriteriaPairsRaw acquisition5 night + 2 day sessions39,765Quality filteringBlur, brightness, contrast, corruption*>20,000Duplicate removalPerceptual hash (threshold=5)>10,000Random selection950 night + 950 day (seed=42)1900Manual curationVisual quality review1759**Final dataset*924 daytime + 835 night-time1759
Limitations
The dataset reflects conditions at Gippsland-region farms in southeastern Australia and may not generalize to other geographic regions or cultivation practices. Data were collected during a single growing season (December 2025); seasonal variations and different cultivars are not captured. The RealSense D435 depth sensor exhibits reduced accuracy on thin structures, specular surfaces, and at range extremes; daytime images are particularly affected, with an average of 62.2 % invalid depth pixels compared to 24.1 % for night-time images due to infrared interference from sunlight. The dataset does not include pixel-level annotations; researchers requiring segmentation masks or bounding boxes must generate them independently. All daytime data were collected under clear sky conditions on a single day; weather variation (e.g., overcast vs sunny) is not represented. The primary focus of this dataset is providing illumination-diverse RGB-D imagery for training detection models; the ground truth diameter annotations (94 measurements across 20 image sets) were collected specifically for validating size estimation algorithms rather than for training regression models.
Ethics statement
The authors have read and complied with the ethical requirements for publication in Data in Brief. This work does not involve human participants, animal experiments, or social media data. Data collection occurred on private land with permission from Bulmer Farms. Images containing incidental capture of farm workers were excluded during curation.
CRediT Author Statement
Rizan Mohamed: Conceptualization, Methodology, Software, Data curation, Writing – original draft, Writing – review & editing. Gayan Kahandawa Appuhamillage: Supervision, Methodology, Writing – review & editing. Joarder Kamruzzaman: Supervision, Writing – review & editing. Alexandra Keith: Resources, Investigation, Writing – review & editing. Linh Nguyen: Supervision, Writing – review & editing.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Kang S.Fan J.Ye Y.Li C.Du D.Wang J.Maturity recognition and localisation of broccoli under occlusion based on RGB-D instance segmentation network Biosyst. Eng.250202510611910.1016/j.biosystemseng.2025.01.007 · doi ↗
- 2Addula S.R.Tyagi A.K.Future of computer vision and industrial robotics in smart manufacturing Tyagi A.K.Artificial Intelligence-Enabled Digital Twin for Smart Manufacturing 2024 Wiley 50553910.1002/9781394303601.ch 22 · doi ↗
- 3Mohamed R.Kahandawa Appuhamillage G.Kamruzzaman J.Keith A.Nguyen L.A novel soft gripper for baby broccoli robotic harvesting Smart Agric. Technol.10202510075310.1016/j.atech.2025.100753 · doi ↗
- 4Mohamed R.Kahandawa Appuhamillage G.Kamruzzaman J.Nguyen L.A novel dataset for baby broccoli identification by using YOL Ov 8 model Proc. IEEE Int. Conf. Mechatron. Autom. (ICMA)20241610.1109/ICMA 61710.2024.10595795 · doi ↗
- 5Mohamed R.Kahandawa Appuhamillage G.Kamruzzaman J.Keith A.Nguyen L.A field-acquired RGB–Depth image dataset for computer vision-based baby broccoli detection and size estimation under varying illumination conditions [dataset]Mendeley Data 32026202610.17632/px 5p 6zdk 6k.3 · doi ↗
- 6Kurtser P.Lowry S.RGB-D datasets for robotic perception in site-specific agricultural operations—A survey Comput. Electron. Agric.212202310803510.1016/j.compag.2023.108035 · doi ↗
- 7Syed T.N.Jizhan L.Xin Z.Shengyi Z.Yan Y.Mohamed S.H.A.Lakhiar I.A.Seedling-lump integrated non-destructive monitoring for automatic transplanting with Intel Real Sense depth camera Artif. Intell. Agric.32019183210.1016/j.aiia.2019.09.001 · doi ↗