Reduced-Order Distributed Unknown Input Observer for State Estimation and Unknown Input Reconstruction
Shuqing Tang, Zongjun Zhu, Xufeng Ling, Fanglai Zhu

TL;DR
This paper introduces a new observer design that estimates system states, unknown inputs, and measurement noise in distributed systems.
Contribution
The novel contribution is a reduced-order distributed unknown input observer that achieves asymptotic convergence for state and unknown input estimation.
Findings
A reduced-order distributed observer was designed to estimate states and unknown inputs asymptotically.
The method decouples control inputs and handles measurement noise in distributed systems.
Simulation results demonstrate the effectiveness of the proposed approach.
Abstract
In traditional observer designs, simultaneous state estimation, unknown input reconstruction (UIR), and measurement noise reconstruction have been fully discussed. However, in distributed observer, this remains to be investigated, and few papers deal with this problem. This paper designs a reduced-order distributed unknown input observer (DUIO) to offer the asymptotic convergent estimations of both the states, the unknown input (UI) and measurement noise (MN), for the uncertain target system with UI and each sensor node with MN. Firstly, by introducing an auxiliary output, the local system in every node is transformed into a system whose output contains no MN. Secondly, for the transformed local system, a distributed reduced-order observer produces asymptotically convergent state estimations. Thirdly, based on the interval observer and state estimation, a UIR is designed, and the UIR…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1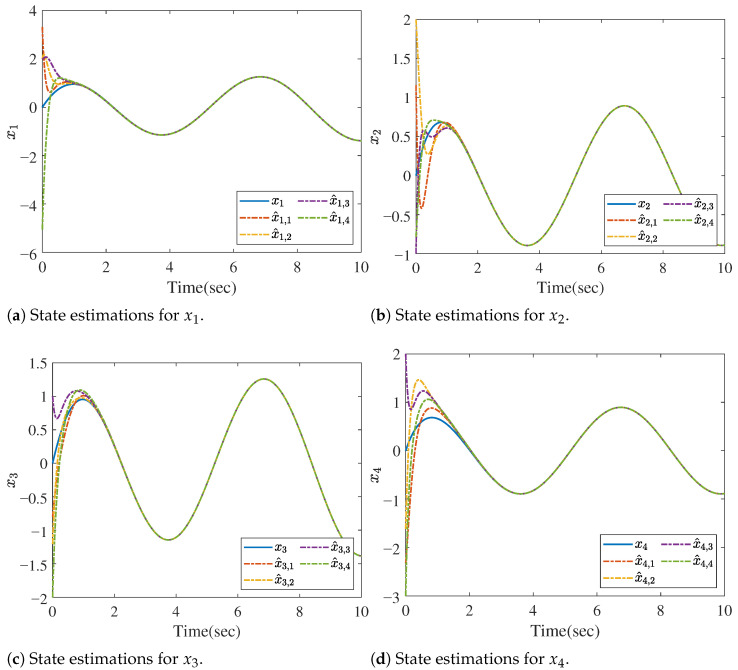 Figure 2
Figure 2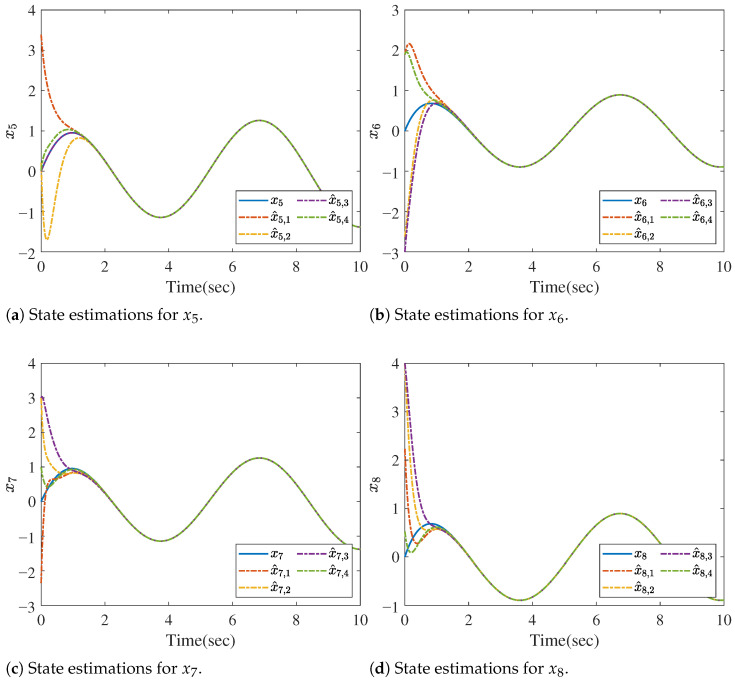 Figure 3
Figure 3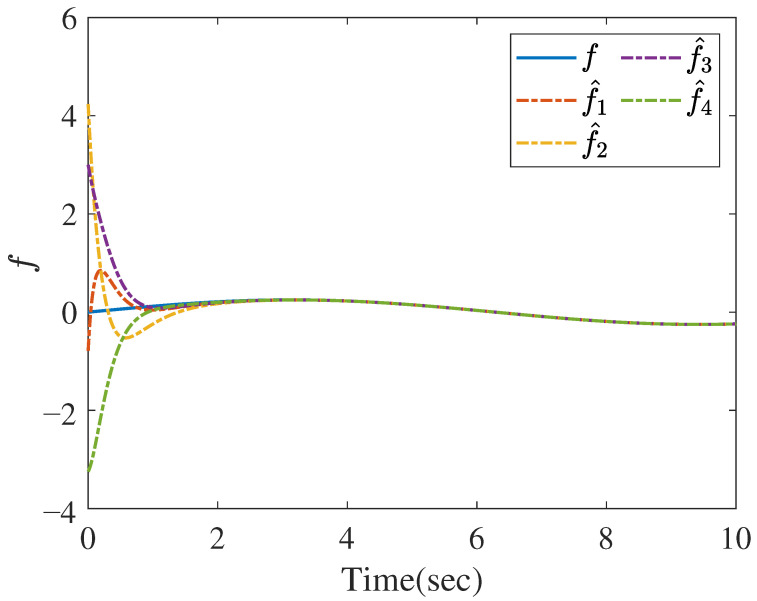 Figure 4
Figure 4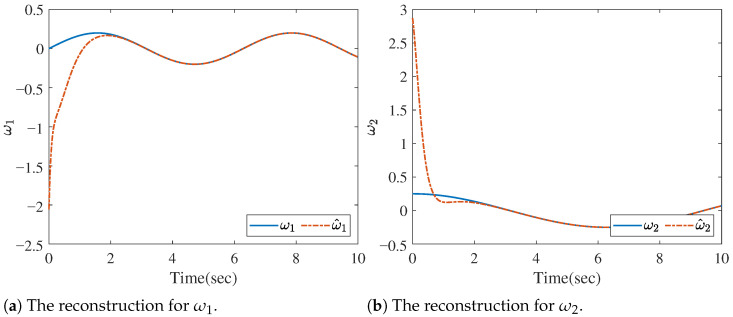 Figure 5
Figure 5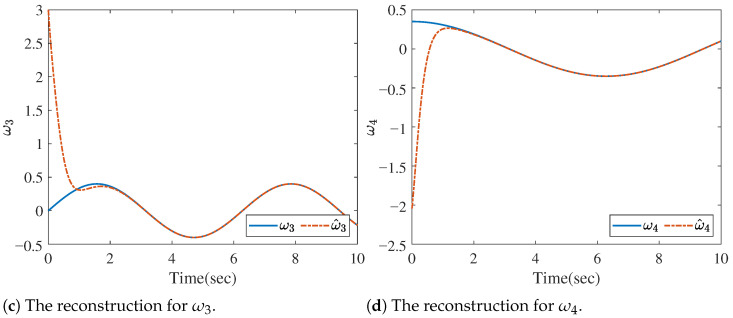 Figure 6
Figure 6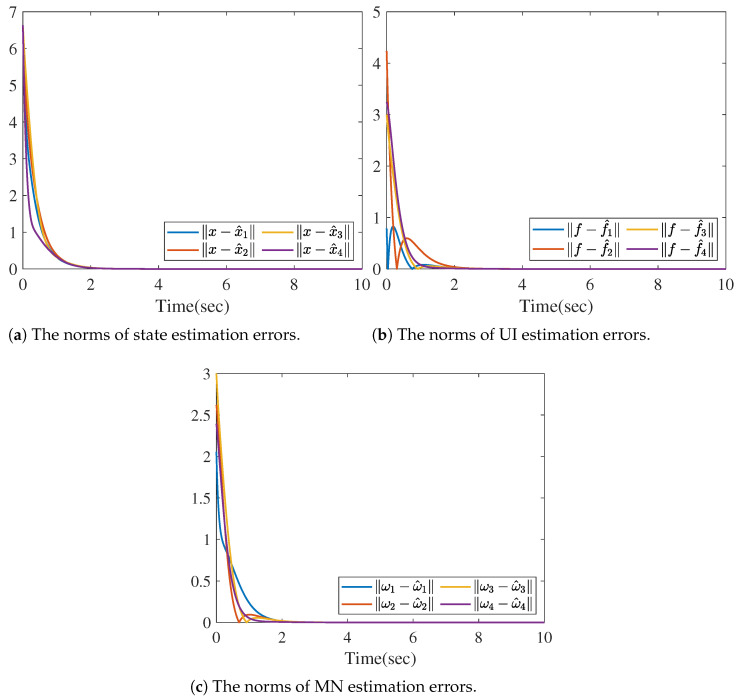 Figure 7
Figure 7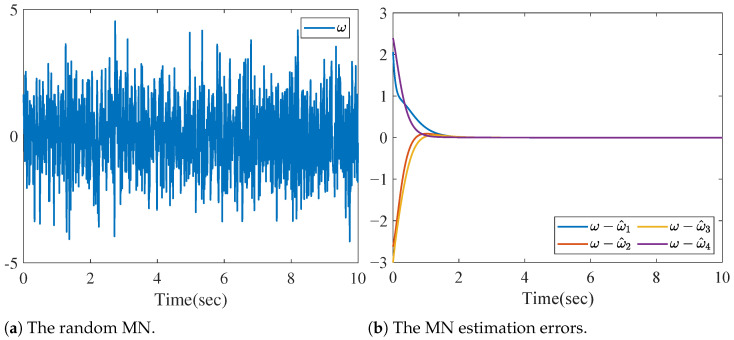 Figure 8
Figure 8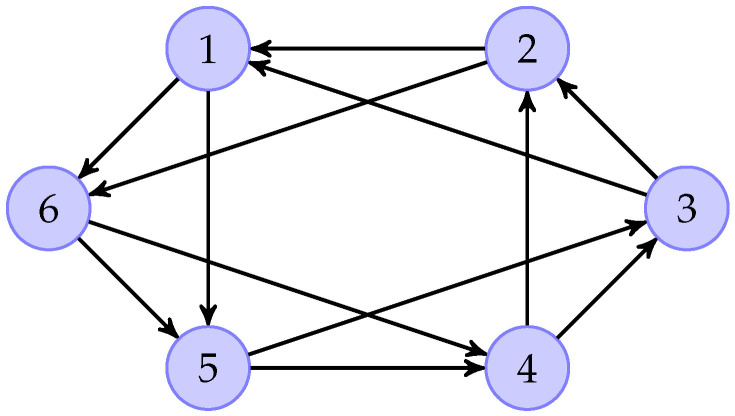 Figure 9
Figure 9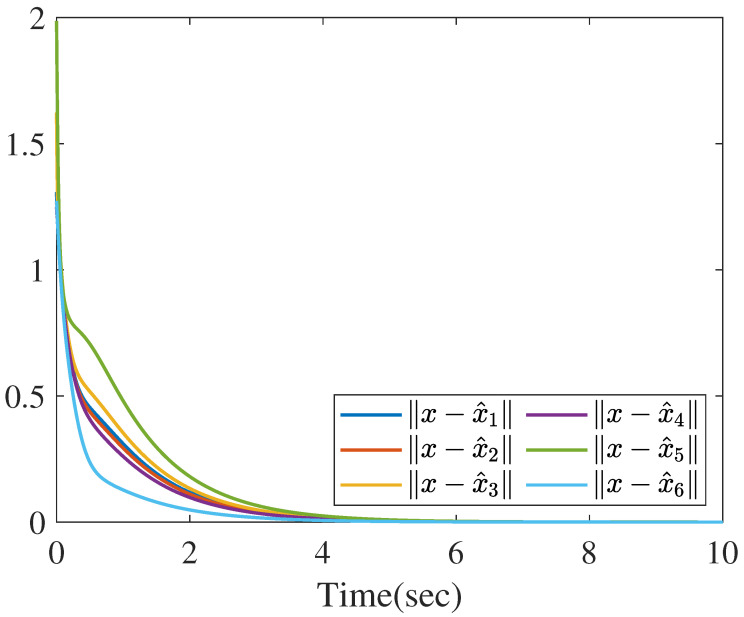 Figure 10
Figure 10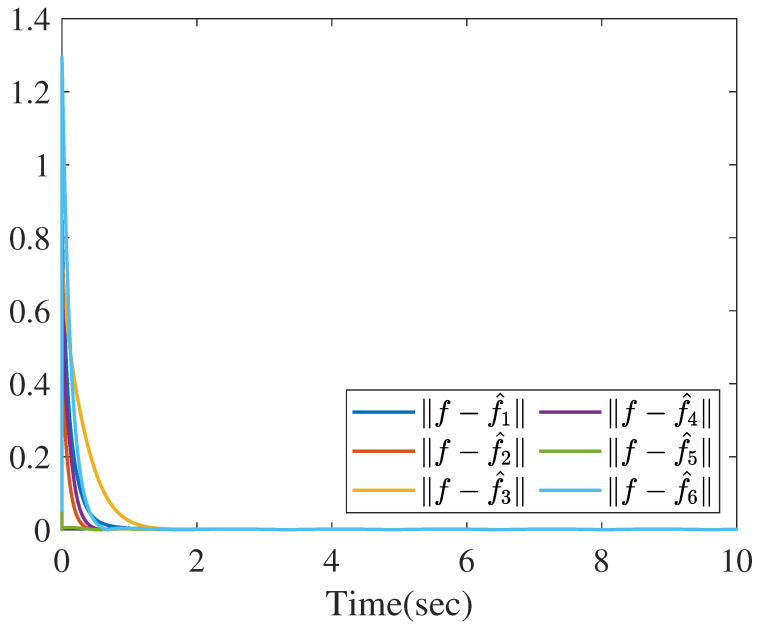 Figure 11
Figure 11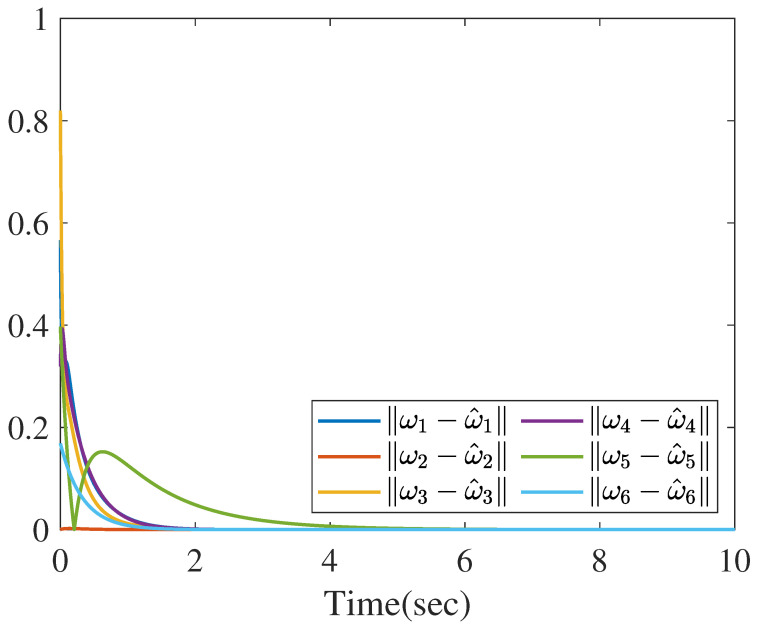 Figure 12
Figure 12- —National Natural Science Foundation of China
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStability and Control of Uncertain Systems · Adaptive Control of Nonlinear Systems · Fault Detection and Control Systems
1. Introduction
With the rise of multi-agent cooperative technology, the distributed estimation problem has gradually attracted researchers’ interests [1,2,3,4,5,6,7]. In distributed estimation problems, a group of sensor nodes is deployed to form distributed observers that collaboratively estimate the state of the target system. Typically, each node possesses measurement, computation, and communication capabilities [8,9]. The advantages of distributed observers lie in their greater cost-effectiveness, easier scalability and maintenance, and enhanced robustness.
In the design of distributed observers, due to limited information acquisition, a single sensor node cannot independently reconstruct the state. Therefore, it must communicate with neighboring nodes, meaning that cooperation among nodes is essential to address the distributed estimation problem. For example, ref. [10] investigated the distributed observer problem, where the information exchange among nodes forms the communication topology, and employed the node-wise detectability decomposition approach to simplify the design of distributed observers.
Recently, event trigger mechanism, jointly switching topology, and UI have been considered in distributed state estimations, and many significant results have been reported in the literature [11,12,13,14,15,16,17,18,19,20,21]. For example, ref. [16] investigates the distributed estimation problem under scenarios where communication channels are subjected to stochastic impulsive attacks. However, until recently, only a few studies have taken external disturbance and measurement noise into consideration. Refs. [22,23,24] consider the distributed observation problem when the system is subject to the external UI without providing the reconstruction of the external UI. The interval observer, an important technique for estimating the stable upper and lower boundaries of the system states based on the upper and lower boundaries of UI, has received extensive attention as shown in [25,26,27,28,29,30,31,32,33]. For example, refs. [28,29] design a distributed interval unknown input observer that is able to obtain simultaneously interval state observation and UI estimation. The studies in [30,31] develop distributed interval observer frameworks to systematically handle state interval observations for the systems under simultaneous external disturbances and MN. Although significant progress has been made in existing work (particularly in interval observers and distributed UI observers [28,29,30,31,34]), in a distributed framework, achieving simultaneous, asymptotic estimation of the state, unknown inputs, and measurement noise remains an open challenge.
Classical unknown input observers (UIOs) provide a precise approach to resist disturbances. For example, ref. [35] discuss the state estimation for the uncertain systems. Refs. [36,37,38,39,40] not only consider the state observation but also the estimation of the UI, which attracts an interest in DUIO. Guided by the idea in the classical UIO design, this article proposes a reduced-order DUIO, which combines a distributed reduced-order observer and a local interval observer. The core contributions of this article are listed as follows.
(i) An output transformation is applied to remove the measurement noise, resulting in an MN-free output. In order to handle the UI, a state transformation is taken, resulting in the state equation being divided into parts, where one part decouples the UI.
(ii) A reduced-order DUIO design method is developed by first constructing a distributed observer from the UI-free state equation to attain asymptotic distributed state estimation.
(iii) By employing an interval observer to obtain bounded output estimates, an algebraic relationship linking the UI to the state can thus be constructed. The UIR can estimate the actual UI asymptotically, and, moreover, it decouples the control input. Thus will benefit in designing the controller to compensate for the influence of the input.
2. Preliminaries
2.1. Notations
and denote, respectively, the kernel space and image space of matrix G. When G is a square matrix, and denote, respectively, the minimal and maximum eigenvalues of G. For matrices , stands for block diagonal matrix with being its diagonal matrices, where , and . For a vector , is a diagonal matrix and its diagonal elements are just the elements of the vector. For two matrices or vectors and , ⇔ ( ). Let be a column vector with elements being 1s dimension being N. means the Euclidean norm of a corresponding vector. Denote the Kronecker product as ⊗. The vector is denoted by . For a matrix , denote and , and then define , and . Then, we have and .
2.2. Basic Graph Theory
The information communication among nodes can be shown by a graph , where represents the node set, represents the edge set, and is the adjacent matrix. means that node i can directly communicate with node j. We always assume that , and, additionally, when ; otherwise, . Denote the Laplacian matrix as , where , when and . For all i and j, graph is named an undirected graph, when if and only if .
Definition 1. There exists a path from node i to j, if the exists a series of edges: , , ⋯ , , , where ( ). A directed graph is said to be strongly connected if there exists a path from any node to any other node.
Lemma 1([10]). If the graph is strongly connected, there must exists a vector , such that , and . is a symmetric positive definite matrix, where .
Definition 2. For two matrices and , the unobservable subspace of the pair is defined by , and the undetectable subspace is , where . Here stands for the characteristic polynomial of the matrix, is the polynomial with roots of zero or positive real parts and is the one with roots of negative real parts.
2.3. System Description
Considering the following multiple sensor system with N sensors
where is the state, is the input, and is the UI. Additionally, is the output vector of the ith sensor, while is the MN affecting the ith sensor. , , , and are all known constant matrices. Assume that is with full row rank, D and are of full column ranks. Moreover, introduce notations of and , where and .
Assumption 1. The condition
*holds for all complex s with *
Assumption 2. The condition
holds.
Remark 1. Assumption 2 is the so-called observer matching condition, which is the necessary condition of designing the UIO.
For system (1), a total of N sensors are deployed, and every sensor node can only access the partial output , which suffers from the measurement noise . The problem to be solved in this paper is to design a DUIO such that, in every sensor node, the state observation , the UIR , and measurement noise reconstruction can be obtained. That is, , and .
3. DUIO Design
In this section, a DUIO which consist of a distributed reduced-order observer and UIR is given. The distributed reduced-order observer is designed to estimate the system states and MN. Based on the interval observer and state estimation, a UIR is given.
3.1. Distributed Reduced-Order Observer Design
For system (1), take an output transformation ; then, , where . Here is the pseudo inverse matrix of satisfying .
Lemma 2.
- implies that the matrix is with not full row rank when the ith sensor is subject to measurement noise.*
Proof. Given that the matrix is full column rank, its singular value decomposition yields orthogonal matrices and , satisfying , in which consists of the singular values of . Furthermore, from the definition of the pseudo inverse , it follows that , and consequently . Thus,
yielding . □
Since is not full row rank, there exists an invertible matrix such that , where is composed of a maximal set of linearly independent rows from . Consequently, , meaning is a full row rank matrix. It follows directly that where .
An additional auxiliary output is introduced as , then . Thus, we can express system (1) as
where is of full row rank.
Lemma 3. Given Assumption 1, there exists at least one complex with such that
which also implies that the pair and thus the pair is undetectable.
Proof. Under Assumption 1, we know that there exists at least one complex satisfying , such that
which gives holds for complex with . As a result, the pair is undetectable. □
Lemma 4. Under Assumption 2, .
Proof.
which gives . Recall that ; then, we have , which is just what we want to prove. □
Lemma 5([36]). * if and only if there are two nonsingular matrices and such that*
where and , and they are both invertible. The following Algorithm 1 will give the construction process of and .
Algorithm 1: Construction of transformation matrices and via singular value decomposition (SVD)
Require:
Matrix (full row rank) Matrix (full column rank) Assumption: Ensure: Nonsingular transformation matrix Nonsingular transformation matrix Step 1: Compute the SVD of the product matrix Set Step 2: Compute the SVD of matrix D Step 3: Compute the SVD of matrix Partition with , Step 4: Construct the transformation matrix Step 5 (Optional): Verify the canonical form Compute Compute .
Remark 2. Lemma 5 is called reduced-order technology, which is the core of dealing with UI.
Due to Lemma 5, we have . Here, , , and . Moreover, is invariable. Now, based on Lemma 5, if we make state and output transformation of and , then we have
where and with and .
Lemma 6. The pair is undetectable.
Proof. Since the pair is undetectable, derived from Lemma 3, there exists at least a complex with such that
Noticing that and are both invertible, thus
So, we can conclude that the pair is undetectable, based on . □
Since the pair is undetectable, we can construct an orthogonal matrix such that and , and moreover, the pair is detectable. Here, and with being the number of undetectable states of .
Now, make a state transformation , and the second and the third equations of (6) become
Partition into , where and . Next, consider the following distributed observer for system (7).
where , and are the observer gains to be designed later, and .
Combining (7) and (8), as well as denoting , yields the observer error dynamics:
If with , then the above equation becomes
where . Moreover
That is, we have
Denote , where , and , then (9) can be rewritten as
The overall system of (11) is
where and .
Lemma 7([23]). Under Assumption A1, if we choose
for some constant , then matrix is a Hurwitz matrix.
Now, we can present the main result of this paper using the following theorem.
Theorem 1. With Assumptions 1 and 2, if the topology is a strong connected, then (12) is a reduced-order DUIO for the multiple sensor system (1) such that and thus , where with .
Proof. We only need to prove that . On the one hand, since the pair is detectable, we can determine the matrix such that the all eigenvalues of the resulting matrix are with negative real parts. On the other hand, Lemma 7 guarantees that if we choose a c value that is large enough such that (13) holds, then the matrix is a Hurwitz matrix. Therefore, the matrix in (12) is a Hurwitz matrix, which means that dynamic system (12) is asymptotically stable. Consequently, we have , i.e., . Since , we have . □
Remark 3. In computational complexity, all complex matrix operations, including the derivation of transformation matrices (e.g., ) and the calculation of observer gains (e.g., ), are performed offline. These are one-time computations and do not contribute to the online burden. And thanks for the reduced order observer, the computational complexity of observer gain reduces to .
3.2. UIR via Interval Observer
In this subsection, a local interval observer is designed in advance and an correlation between the UI and the state is set up. In this way, a UIR method is developed, and the UIR is able to estimate the actual UI asymptotically.
According to the first Equation (6), we can deduce that
where . For (14), we design an interval observer as follows
where is produced by the reduced-order observer (11). Moreover, (15) gives
where and .
Lemma 8([41]). Let satisfy . Then, for any constant matrix , .
Lemma 9([41]). Suppose that R is Metzler, , and in the system , then for all .
Theorem 2. Under Assumptions 1 and 2, system (15) is an interval observer of (14) such that holds for all with scalar , If a Metzler and Hurwitz matrix M is arbitrarily selected and the initial values are assigned and , where .
Proof. Using (14) and (15), we obtain the interval observer error dynamics as
where and . By Lemma 8, we can choose suitable and such that and hold. Since . Therefore, there exists such that and hold for all . Additionally, since , then, under Assumption 2, and by Lemma 8, one has which implies that and . Under the condition that matrix M is both Hurwitz and Metzler, Lemma 9 directly yields for all . □
To build up a relationship between the UI and the state estimation error from the output bounds algebraically, we first note that . This inequality guarantees the existence of a time-varying variable such that
where with . Then, one has
where time-varying variable with if , otherwise , where is the jth entry of . Meanwhile, by (18), we have
Consequently, based on (16) and (15), (20) gives
where and . Now, when we compare (14) with (21), we obtain
By Lemma 4, . Thereby, we can deduce that
which means that
exists. As a result, we have
Now, by referring to (23), a UIR method is developed as
Here, is the finite-time estimate of , produced via the following differentiator [42]:
where and denote positive tuning gains whose values require proper selection. Therefore, provides a finite-time estimate of , and hence consequently forms the corresponding finite-time estimate of .
Moreover, a reconstruction for the measurement noise can be obtained by
where is provided by Theorem 1 and . Obviously, we have , where .
Remark 4. In [29], the problems of designing distributed fault-tolerant observers for nonlinear systems with actuator faults and sensor faults are solved through estimating system states and actuator faults. The estimation errors satisfy the uniformly bounded condition, not in asymptotic convergent rate. Therefore, there exists a gap between the estimation and real trajectory. In our paper, based on estimate error of UI-free part , we can design an observer gains and a positive scalar c to guarantee the matrix in (12) is a Hurwitz matrix which means that state observer error dynamic system (12) is asymptotically stable. Additionally, M can be selected as , where denotes the convergence rate, to guarantee that the interval observer error dynamics (17) are bounded stable. Thus, (8) and (24) can provide the theoretically accurate observation.
4. Simulation
We present two numerical simulations in this section.
4.1. Example 1
The considered system is in form (1). The matrices of the state equation are , , . Suppose the system is equipped with four sensor groups, where the four output matrices corresponding to the four output equations are
Additionally, , , and . Moreover, we assume that UI signal impacting on the state equation is , and the MNs are , , and . The input is given as .
The information communication topological graph is shown by Figure 1. Based on Figure 1, we can obtain
Since the target system is a 8-dimension dynamic system, we denote the state vector as . Now, based on Theorem 1, the asymptotic convergent state estimation can be obtained, and the estimating performances are shown in Figure 2 and Figure 3. Figure 2 offers the state estimations for the state variables , , and , while Figure 3 gives the estimations for , , and . The notations in the figures stand for the estimations of ( ) provided by the jth( ) distributed observer. The initial states are randomly chosen.
Figure 4 shows the reconstruction of f by (23); that is, . Figure 5a–d provide the reconstruction of the measurement noise , , , and , respectively, based on (26). We also present the norms of the state, UI, and MN estimation errors in Figure 6, which clearly show that the errors converge rapidly to zero.
To show the effect of the proposed method in more particular case, we consider a random MN , as shown in Figure 7a. Then, the estimation errors of MN is shown in Figure 7b. It is clear that the dynamic of errors is stable, which validates the effect of the proposed method.
4.2. Example 2
Consider an 18-dimension multiple sensor system (1) the matrices of which are . Suppose that the system is equipped with six sensors, and the output matrices in of the six sensors are, respectively, . The UI is supposed to be , and MN are . The control input is set as . The initial states are randomly chosen. The information communication topological graph is shown by Figure 8. Additionally, we can obtain the Laplacian matrix as
Based on the distributed reduced-order observer (8), the norms of state estimate errors in all sensors are shown in the Figure 9, which clearly verifies that the proposed distributed observer can generate the asymptotic estimation of state. Furthermore, Figure 10 shows the norms of UI f reconstruction errors in all sensors and Figure 11 shows the norms of MN reconstruction errors in all sensors, which verify that the proposed method can generate the asymptotic estimation of UI and MN, respectively.
5. Conclusions
In this paper, for a multiple sensor target system, where the target system is with UI and each sensor node deployed suffers from MN, the design problem of the DUIO is investigated in detail. Through a state equivalent transformation, the original system is decomposed into two constituent parts. One is free from UI and the other is still affected by the UI. For the subsystem being free from UI, a distributed observer is constructed to produce the state estimation. Moreover, by designing an interval observer, we derive an algebraic state-UI relationship, and then a DUIR is provided. Consequently, the DUIO consists of two parts: one is actually a distributed reduced-order observer, and the other is the UIR. Concurrent asymptotic estimation of the UI, system states, and measurement noise is achieved by the proposed reduced-order DUIO. Additionally, the estimation of UI or the UIR decouples the input. How to improve the result to be suitable for the multiple sensor system with switching topology, or sensor data distortion and sensor attacks are slated for future investigation.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Cheng L. Chen X. Zhao F. Qiu J. Cao J. Observer-based prescribed-time leader-follower consensus for nonlinear multiagent systems under stochastic switching topologies J. Syst. Sci. Complex.2025381595161310.1007/s 11424-025-4355-5 · doi ↗
- 2Zhang L. Guay M. Wang S. Lu M. Completely distributed state estimation for jointly observable uncertain linear systems IEEE Trans. Autom. Control 2025707063707010.1109/TAC.2025.3572956 · doi ↗
- 3Koo S. Lee J.G. Shim H. A distributed observer accommodating a broad range of intermittent communication scenarios IEEE Control Syst.202591682168710.1109/LCSYS.2025.3583672 · doi ↗
- 4Yang Y. Liu F. Yang H. Li Y. Liu Y. Distributed finite-time integral sliding-mode control for multi-agent systems with multiple disturbances based on nonlinear disturbance observers J. Syst. Sci. Complex.202134995101310.1007/s 11424-020-9152-6 · doi ↗
- 5Muntean M.V. Real-Time Detection of Io T Anomalies and Intrusion Data in Smart Cities Using Multi-Agent System Sensors 202424788610.3390/s 2424788639771625 PMC 11679726 · doi ↗ · pubmed ↗
- 6Poh W.Q.T. Naayagi R.T. Modelling and integration of a piezoelectric cantilever beam with quasi-z-source inverter for self-powered dynamic system application Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM)Montreal, QC, Canada 2–6 August 202015
- 7Poh W.Q.T. Bin Mohamad Saifuddin M.R. Naayagi R.T. A novel self-powered dynamic system using a quasi-z-source inverter-based piezoelectric vibration energy harvester Electronics 2020926510.3390/electronics 9020265 · doi ↗
- 8Cai G. Yin G. Liu Y. Feng J. Liang J. Wang F. Liu H. Stochastic cooperative adaptive cruise control with sensor data distortion and communication delay IEEE Trans. Intell. Transp.2025269500951510.1109/TITS.2025.3565857 · doi ↗