An Adaptive Fault-Tolerant Federated Kalman Filter for a Multi-Sensor Integrated Navigation System
Guangle Gao, Guoqing Li, Yingmin Yi, Yongmin Zhong

TL;DR
This paper introduces a new adaptive filter to improve navigation system reliability by handling sensor errors and outliers.
Contribution
The novel AFTFKF integrates adaptive noise estimation and outlier detection for robust multi-sensor navigation.
Findings
The proposed AFTFKF improves accuracy in outlier-prone navigation scenarios.
SPRT-MLE and DCST methods effectively handle both slow and abrupt outlier changes.
Simulation results confirm strong stability and performance in integrated navigation systems.
Abstract
To achieve autonomous and reliable all-weather cross-domain aerospace navigation, this study proposes an adaptive fault-tolerant federated Kalman filter (AFTFKF) for an INS/SRNS/CNS integrated navigation system to enhance system robustness against measurement outliers. First, a noise estimator based on maximum likelihood estimation (MLE) and aided by a sequential probability ratio test (SPRT) is introduced to handle slowly growing outliers. Second, a double residual-based Chi-square test (DCST) information factor is designed to mitigate the impact of inaccurate local state estimation in subsystems under abruptly changed outliers. Finally, the SPRT-MLE-based noise estimator and the DCST-based information factor are integrated into the federated Kalman filter framework to construct the complete AFTFKF. Simulation results demonstrate that the proposed method achieves superior accuracy and…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
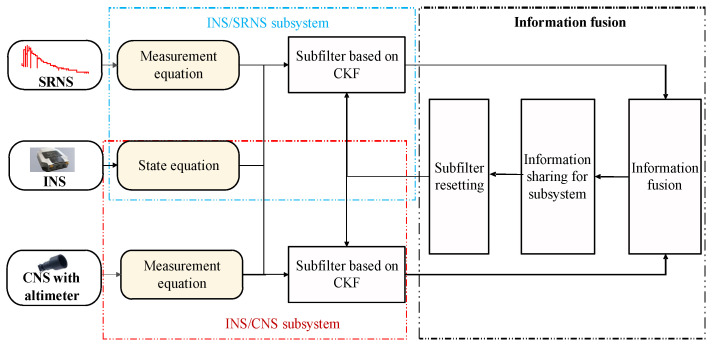 Figure 1
Figure 1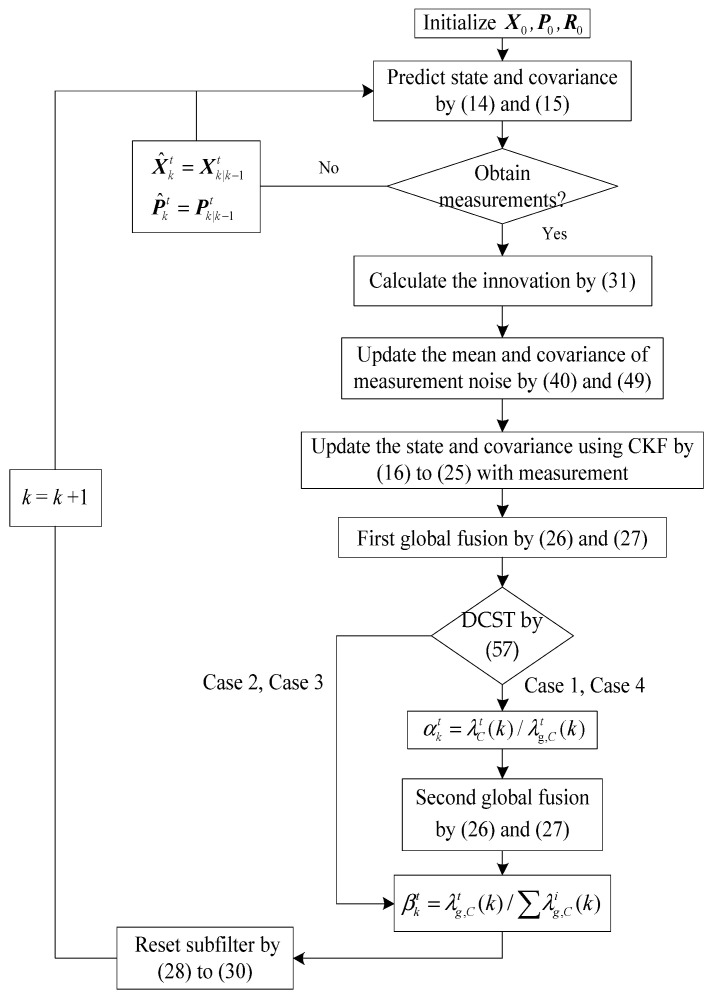 Figure 2
Figure 2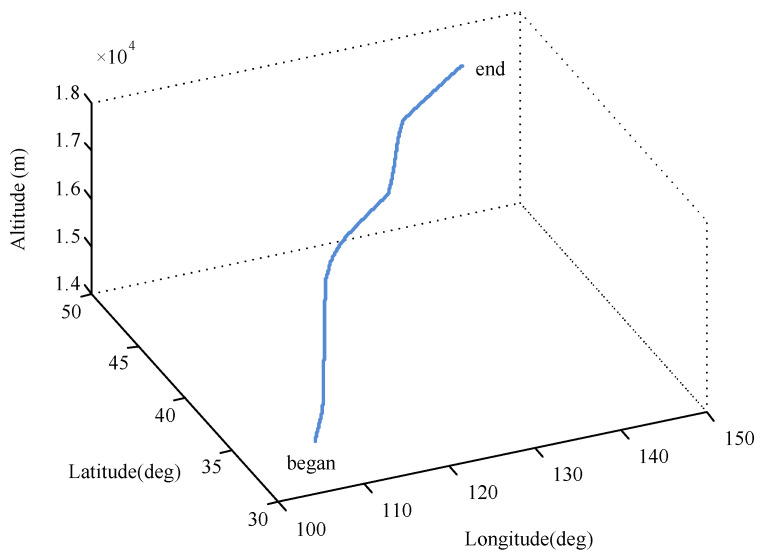 Figure 3
Figure 3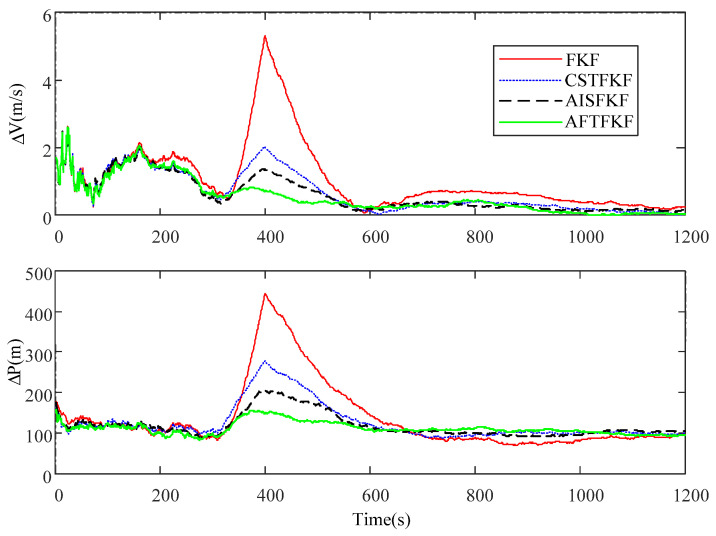 Figure 4
Figure 4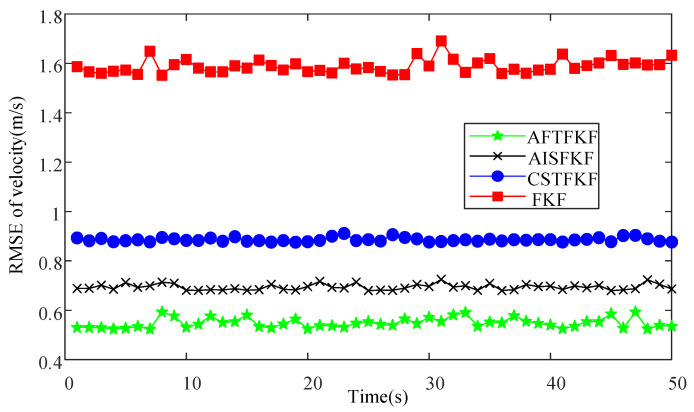 Figure 5
Figure 5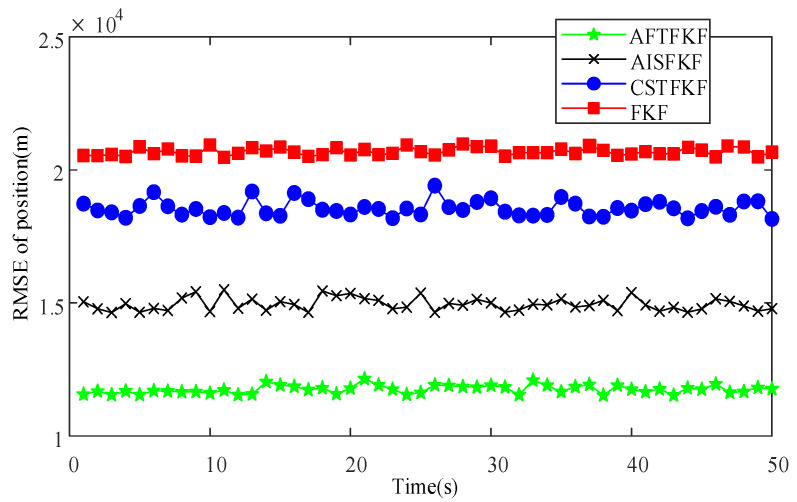 Figure 6
Figure 6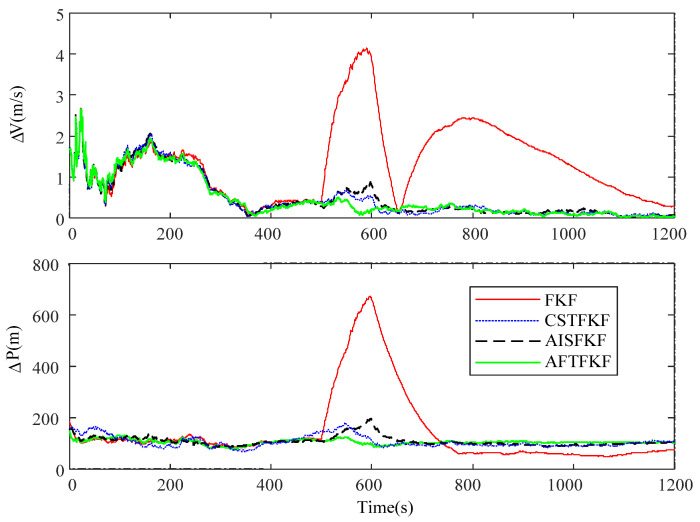 Figure 7
Figure 7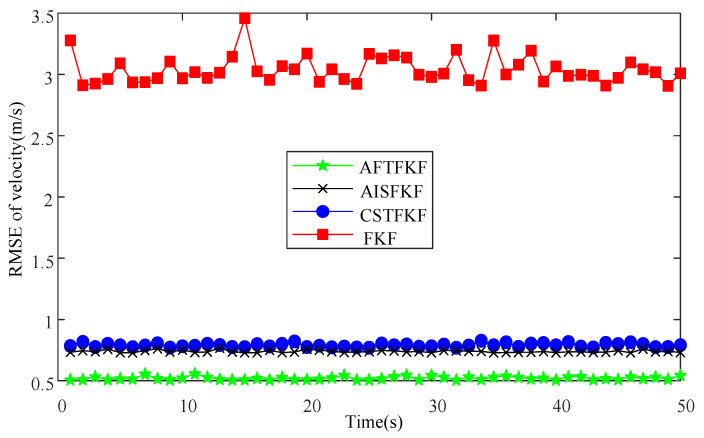 Figure 8
Figure 8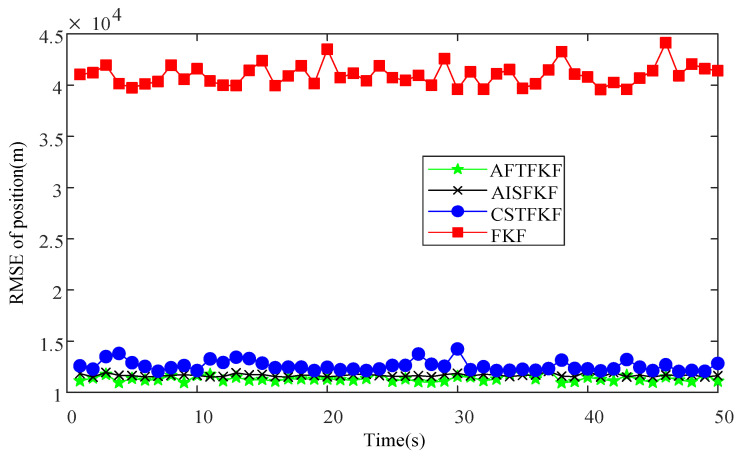 Figure 9
Figure 9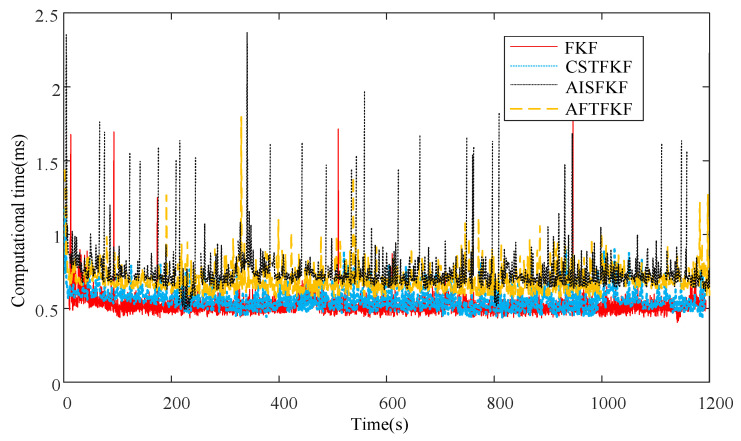 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTarget Tracking and Data Fusion in Sensor Networks · Inertial Sensor and Navigation · Air Traffic Management and Optimization