Performance Analysis of LSTM, GRU and Hybrid LSTM–GRU Model for Detecting GPS Spoofing Attacks
Umur Kuriş, Özgür Can Turna

TL;DR
This paper compares LSTM, GRU, and a hybrid LSTM–GRU model for detecting GPS spoofing attacks on drones, finding the hybrid model to be most effective.
Contribution
The novel contribution is the development and evaluation of a hybrid LSTM–GRU deep learning model for GPS spoofing detection in UAVs.
Findings
The LSTM–GRU hybrid model achieved 99.31% accuracy and 97.47% F1-score in detecting GPS spoofing attacks.
All models showed near-perfect classification performance based on ROC curves and AUC values.
The hybrid model outperformed standalone LSTM and GRU models in recall and overall detection reliability.
Abstract
The exposure of Unmanned Aerial Vehicles (UAVs) to Global Positioning System (GPS) spoofing attacks constitutes a major cybersecurity challenge. In this work, we conduct a comparative performance analysis of LSTM, GRU, and sequential LSTM–GRU hybrid deep learning models for the detection of GPS spoofing attacks. The ‘UAV Attack’ dataset was preprocessed, and the 11 most significant features were selected using correlation and mutual information algorithms. The models were evaluated using a robust 5-fold cross-validation framework. A combination of 99.31% accuracy, 96.98% recall, and a 97.47% F1-score was achieved by the LSTM–GRU hybrid model, distinguishing it as the leading performer in the experimental study. The LSTM model achieved the highest precision, with a value of 98.49%. ROC curves and AUC values confirmed that the classification performance of all models was close to perfect…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
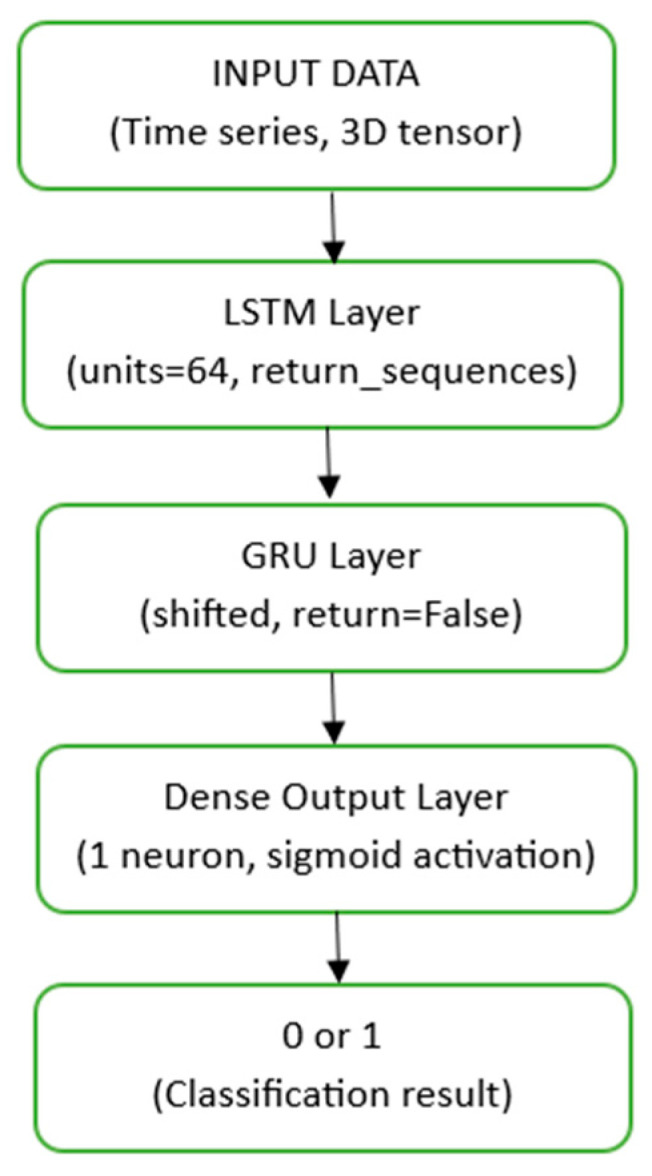 Figure 1
Figure 1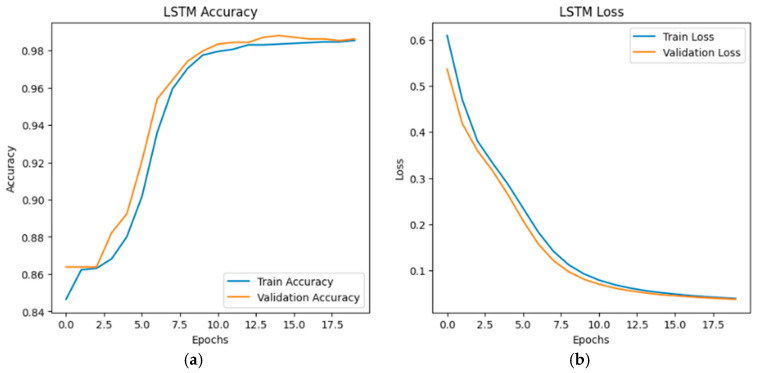 Figure 2
Figure 2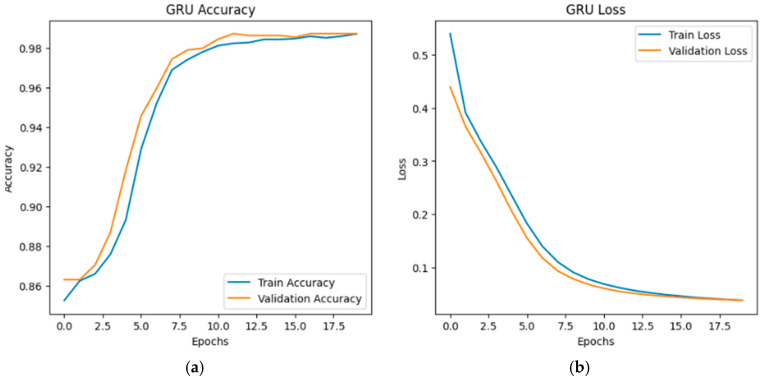 Figure 3
Figure 3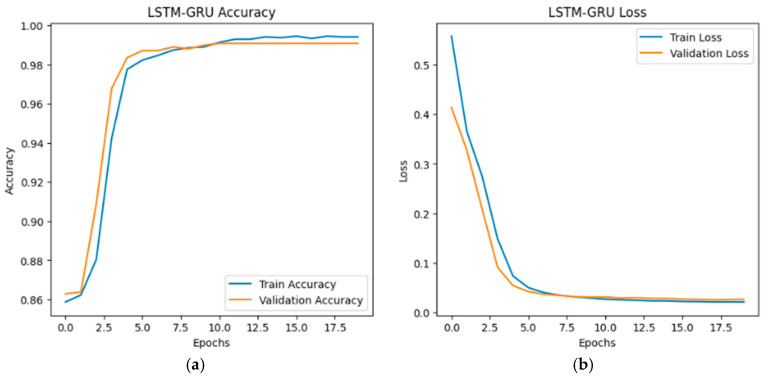 Figure 4
Figure 4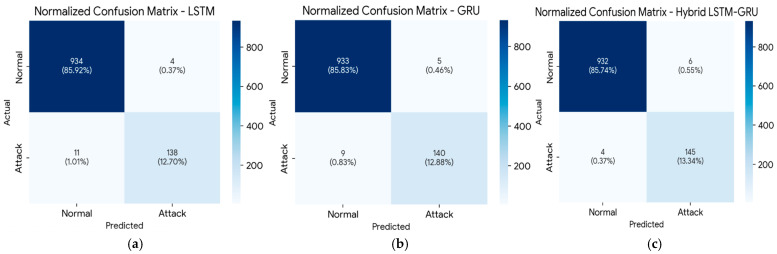 Figure 5
Figure 5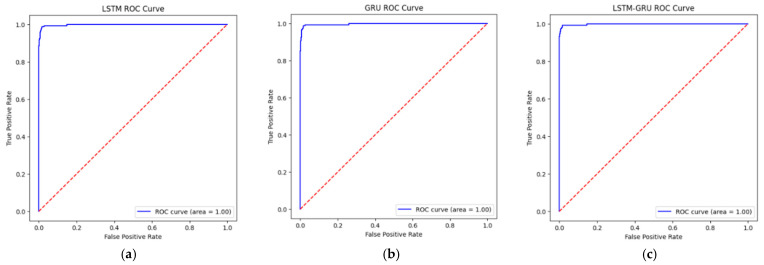 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Adversarial Robustness in Machine Learning · GNSS positioning and interference