Probabilistic Bird Trajectory Forecasting with Heavy-Tailed Uncertainty Modeling for Low-Altitude Airspace Monitoring
Feiyang Song, Zhonghe Liu, Yuyang Zhao, Jingguo Zhu

TL;DR
This paper introduces a compact and efficient model for predicting bird flight paths and detecting UAVs in shared low-altitude airspace.
Contribution
A lightweight Transformer with heavy-tailed uncertainty modeling for accurate and efficient bird trajectory forecasting and UAV detection.
Findings
Mini-BirdFormer achieves a minADE of 0.785 m with only 1.05 million parameters.
The model reduces negative log-likelihood from 1.25 to −2.01 compared to a Gaussian LSTM baseline.
It enables 616 FPS inference on resource-constrained platforms and 92% UAV detection recall without false alarms.
Abstract
The low-altitude airspace of bird flocks is gradually shared by unmanned aerial vehicles (UAVs), posing safety risks that necessitate accurate trajectory forecasting. However, existing vision-based methods often treat trajectory prediction and UAV detection as separate tasks, assume light-tailed Gaussian noise, and rely on heavy backbones. These limitations, when applied to bird trajectory forecasting, limit uncertainty calibration and embedded deployment in ground-based monocular surveillance. In this work, we propose a unified framework for low-altitude monitoring. Its core, Mini-BirdFormer, combines a lightweight Transformer encoder with a Student-t mixture density head to model heavy-tailed flight dynamics and produce calibrated uncertainty. Experiments on a real-world dataset show the model achieves strong long-horizon performance with only 1.05 million parameters, attaining a…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
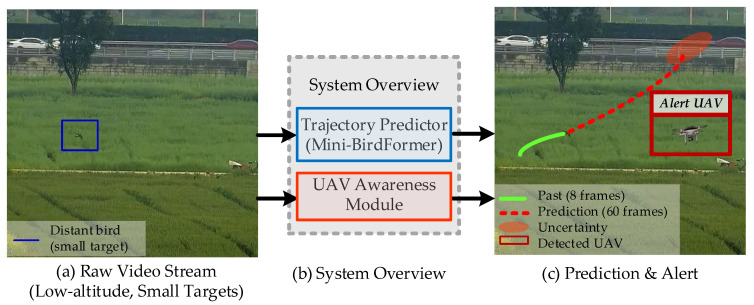 Figure 1
Figure 1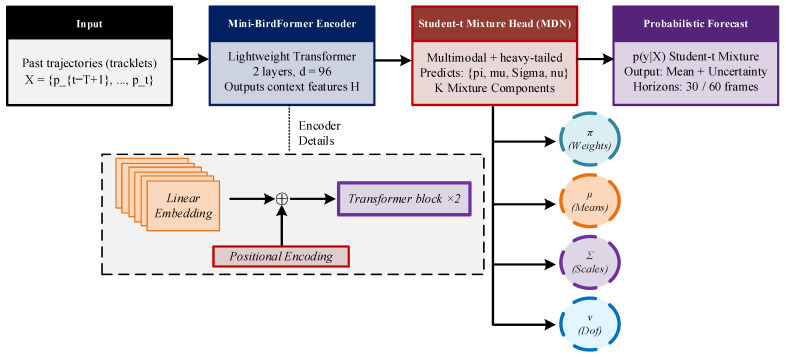 Figure 2
Figure 2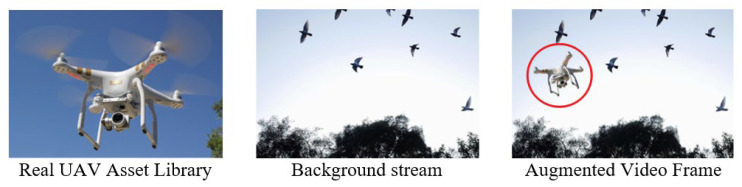 Figure 3
Figure 3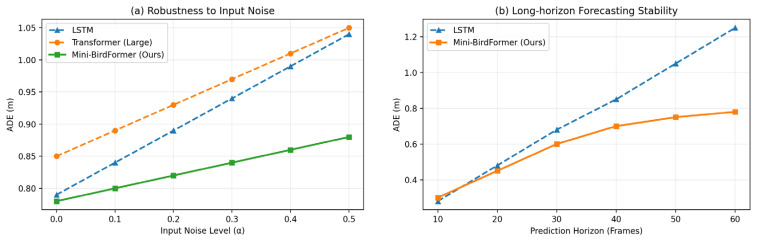 Figure 4
Figure 4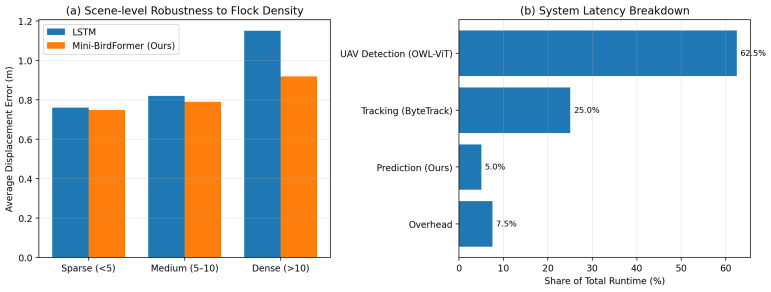 Figure 5
Figure 5 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Aerospace and Aviation Technology · Robotics and Sensor-Based Localization