Design and Implementation of a Low-Cost Perception System for Aerial Robots in Confined Spaces
Susan Basnet, Jens Christian Andersen, Evangelos Boukas

TL;DR
This paper presents a low-cost perception system for drones flying in tight spaces like ship tanks, using time-of-flight sensors to avoid collisions and enable safe navigation.
Contribution
A novel perception system using 12 ToF sensors is proposed as a lightweight, low-cost alternative to bulky LiDAR for aerial robots in confined spaces.
Findings
The system provides a 360° radial view within 4 meters using strategically placed sensors.
Experiments confirmed the system's reliability, repeatability, and synchronization in real-world and simulated confined spaces.
The design enables safe navigation for small drones in featureless and cluttered environments.
Abstract
Operating an aerial vehicle in a confined space, such as a vessel ballast tank, is a major challenge in terms of localization, perception, and control due to limited visibility, constrained maneuvering space, and the absence of reliable (if any) GNSS signals. This paper addresses the design considerations for a quadcopter in confined spaces, focusing on a novel perception system using 12 VL53L8CX time-of-flight (ToF) sensors from STMicroelectronics. These sensors are used for enhanced perception and collision avoidance while flying in confined spaces, making them a suitable alternative to bulky LiDAR systems, reducing weight, cost, and required computational power. These sensors are placed strategically around the quadcopter to cover 360° radial view within a 4 m range. Experiments are conducted to test the reliability and repeatability of the integrated system, along with its…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
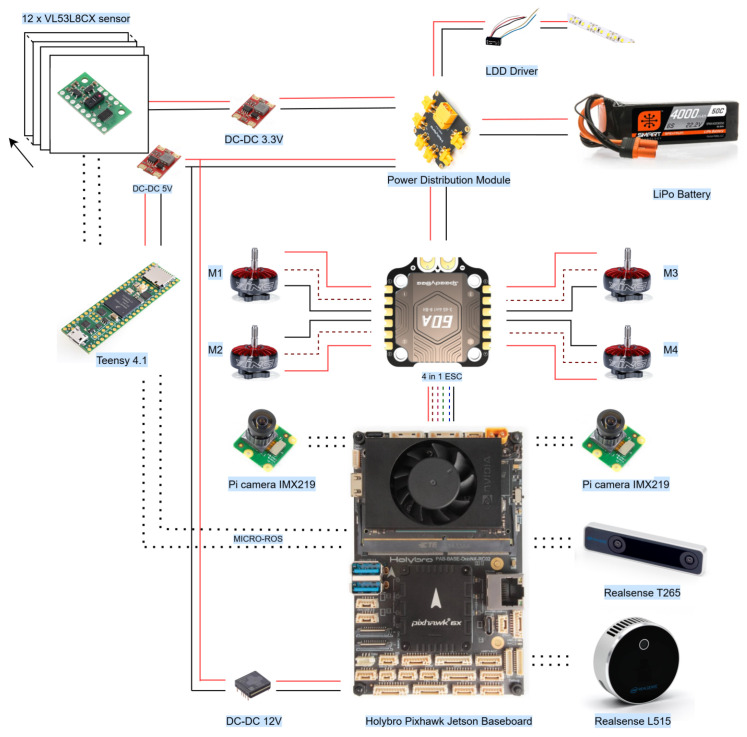 Figure 1
Figure 1 Figure 2
Figure 2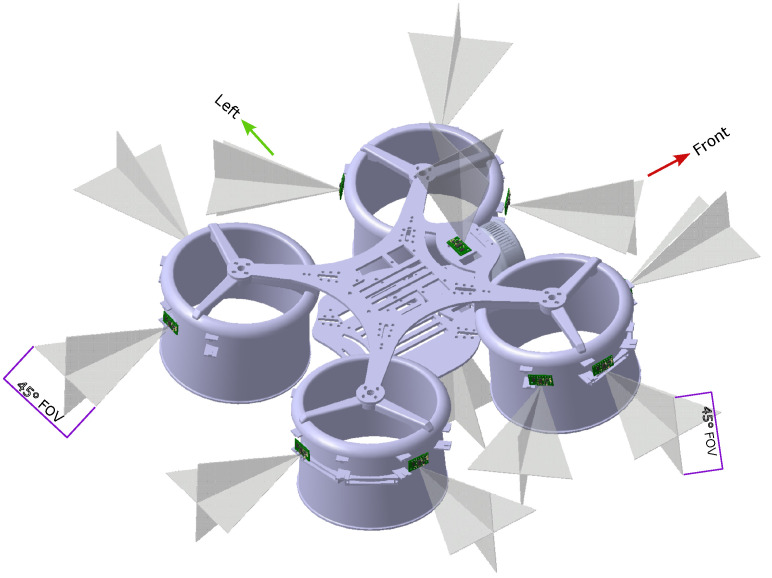 Figure 3
Figure 3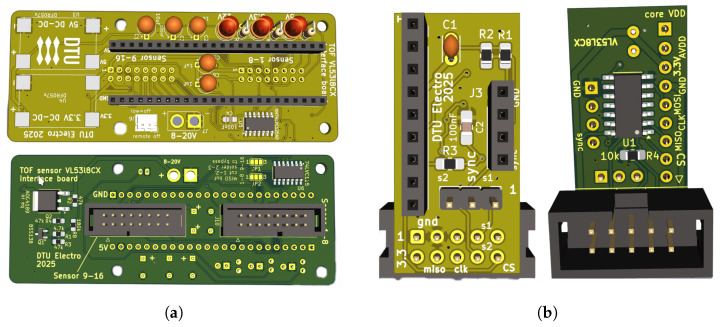 Figure 4
Figure 4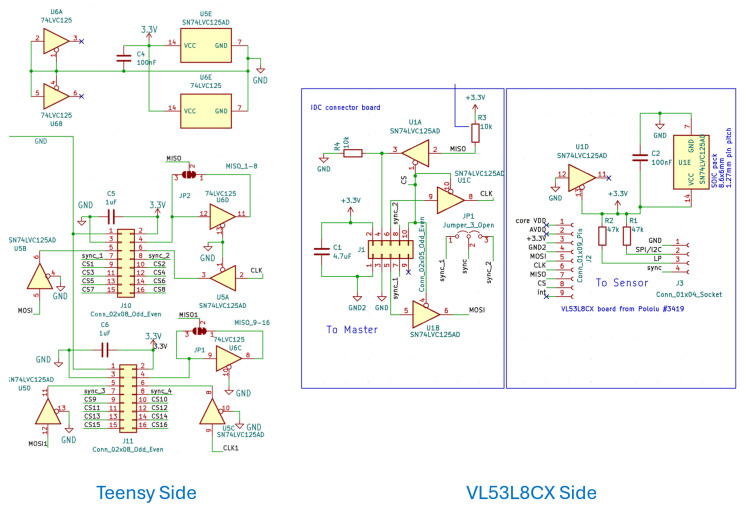 Figure 5
Figure 5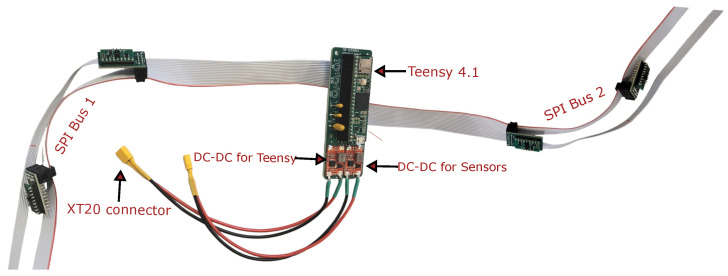 Figure 6
Figure 6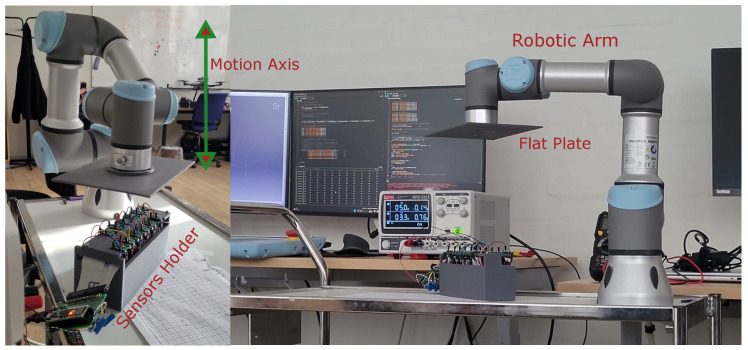 Figure 7
Figure 7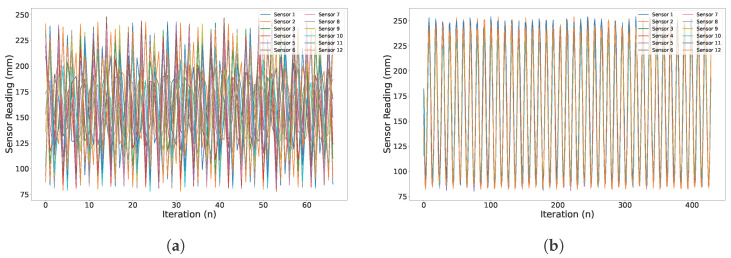 Figure 8
Figure 8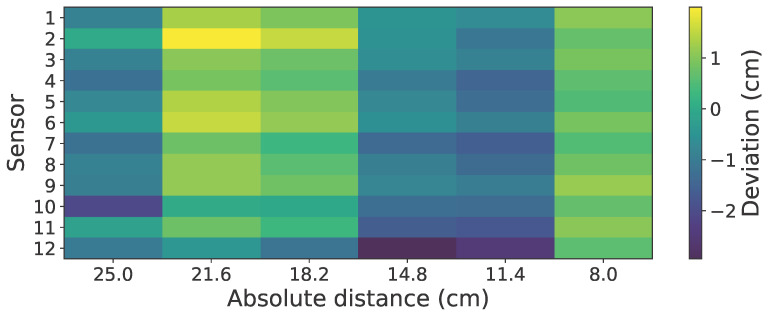 Figure 9
Figure 9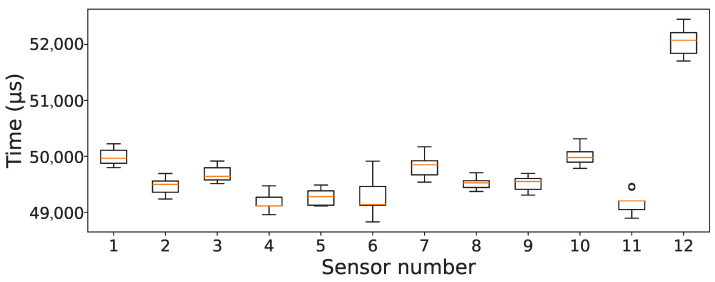 Figure 10
Figure 10 Figure 11
Figure 11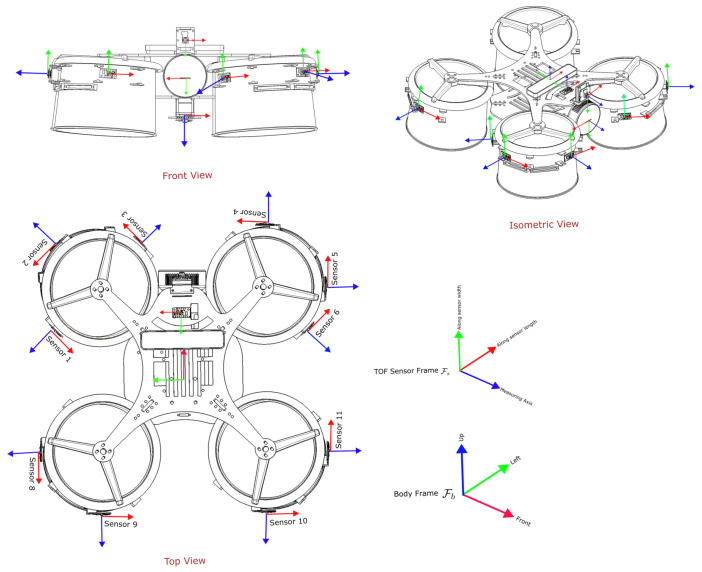 Figure 12
Figure 12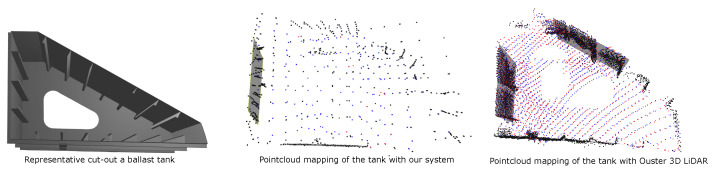 Figure 13
Figure 13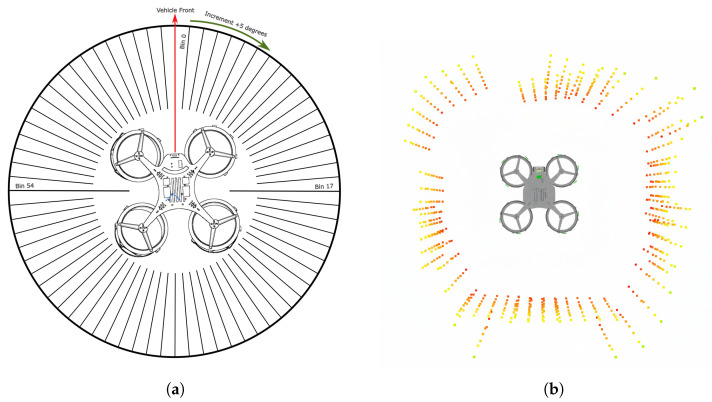 Figure 14
Figure 14 Figure 15
Figure 15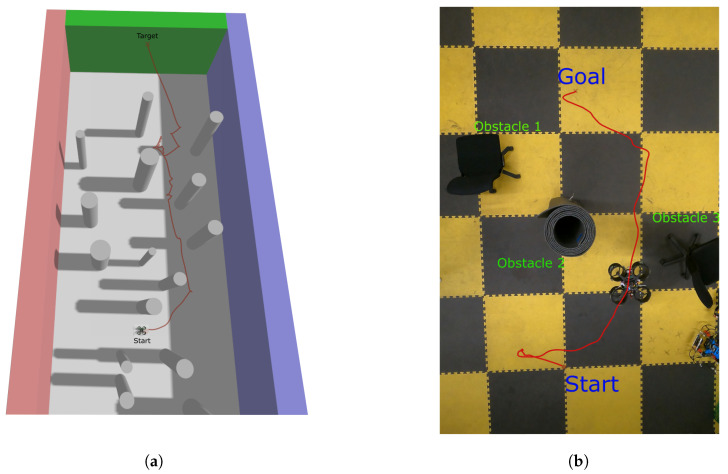 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Underwater Vehicles and Communication Systems · Robotics and Sensor-Based Localization