Haptic and Palpation Sensing for Robotic Surgery: Engineering Perspectives on Design and Integration
Michael H. Friebe

TL;DR
Current robotic surgery systems lack touch feedback, but new sensors and AI could improve safety and precision by restoring this capability.
Contribution
The paper highlights engineering challenges and solutions for integrating palpation and haptic sensing into robotic-assisted surgery.
Findings
Sensor technologies can exceed human tactile sensitivity but face integration and standardization barriers.
Multimodal sensor fusion with AI and imaging is essential to address variability and noise in tissue assessment.
Restoring haptic feedback could reduce tissue damage and improve surgeon confidence in minimally invasive procedures.
Abstract
Robotic-assisted surgery (RAS) lacks clinically integrated palpation and haptic feedback. Emerging force, tactile, vibroacoustic and audio sensors enable quantifiable tissue characterisation. Sensor performance can exceed human tactile sensitivity but remains difficult to integrate clinically. Multimodal sensor fusion with artificial intelligence and imaging is essential to compensate for variability and noise. Palpation-enabled RAS supports improved safety, training efficiency, and progression toward autonomous operation. What are the main findings? This perspective identifies the absence of palpation and haptic sensing as a key limitation of current robotic-assisted surgical systems. While multiple sensor technologies are capable of quantitatively capturing tissue mechanical properties, their clinical adoption is restricted by challenges in miniaturisation, sterilisation, robustness,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
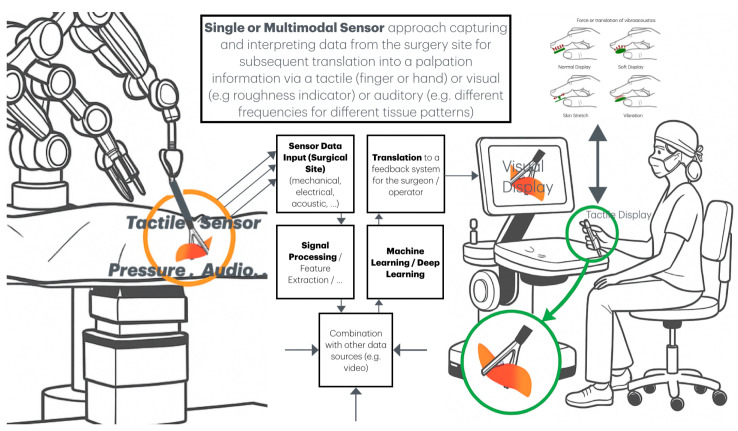 Figure 1
Figure 1 Figure 2
Figure 2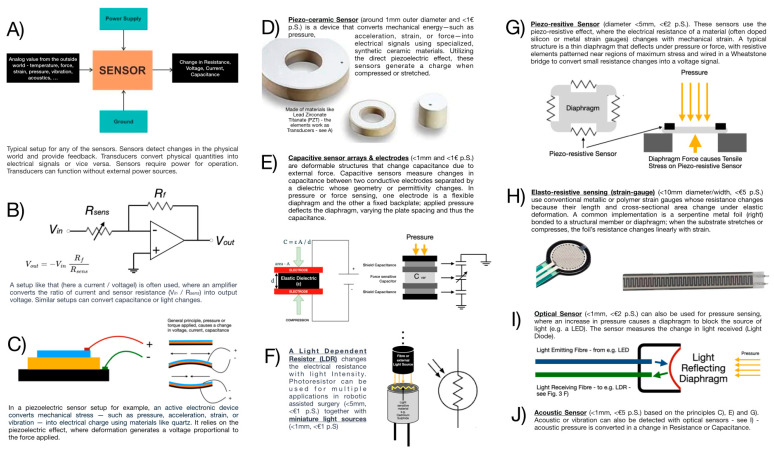 Figure 3
Figure 3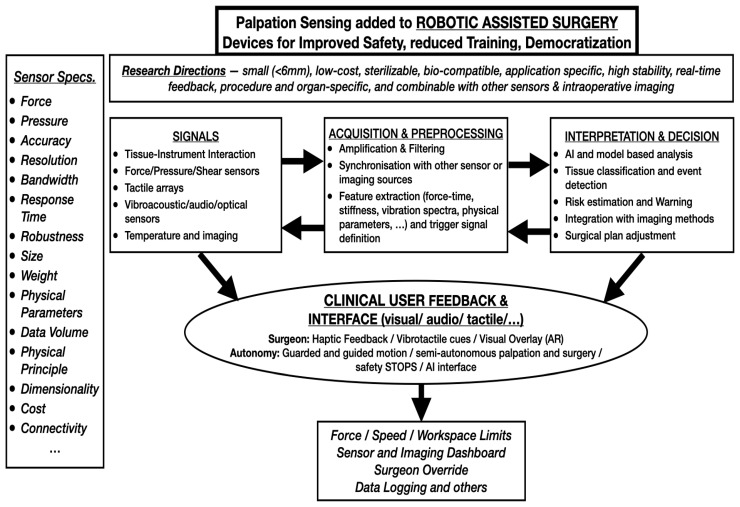 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Surgical Simulation and Training · Intraoperative Neuromonitoring and Anesthetic Effects