Curriculum-Based Reinforcement Learning for Autonomous UAV Navigation in Unknown Curved Tubular Conduits
Zamirddine Mari, Jérôme Pasquet, Julien Seinturier

TL;DR
This paper introduces a reinforcement learning method for drones to navigate unknown curved tubes using only local sensor data, outperforming traditional methods.
Contribution
The novel approach introduces a curriculum-based RL framework with explicit turn negotiation formulation and reward design for tubular navigation.
Findings
The RL agent using PPO outperforms deterministic controllers in navigating curved tubes with limited geometric information.
A turning-negotiation mechanism combining visibility, memory, and LiDAR symmetry ensures stable navigation in partial observability.
The learned behavior is robust and transferable to high-fidelity 3D environments with continuous physical dynamics.
Abstract
Autonomous drone navigation in confined tubular environments remains a major challenge due to the constraining geometry of the conduits, the proximity of the walls, and the perceptual limitations inherent to such scenarios. We propose a reinforcement learning (RL) approach enabling a drone to navigate unknown three-dimensional tubes without any prior knowledge of their geometry, relying solely on local observations from a Light Detection and Ranging (LiDAR) sensor and a conditional visual detection of the tube center. In contrast, the Pure Pursuit algorithm, used as a deterministic baseline, benefits from explicit access to the centerline, creating an information asymmetry designed to assess the ability of RL to compensate for the absence of a geometric model. The agent is trained through a progressive curriculum learning strategy that gradually exposes it to increasingly curved…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2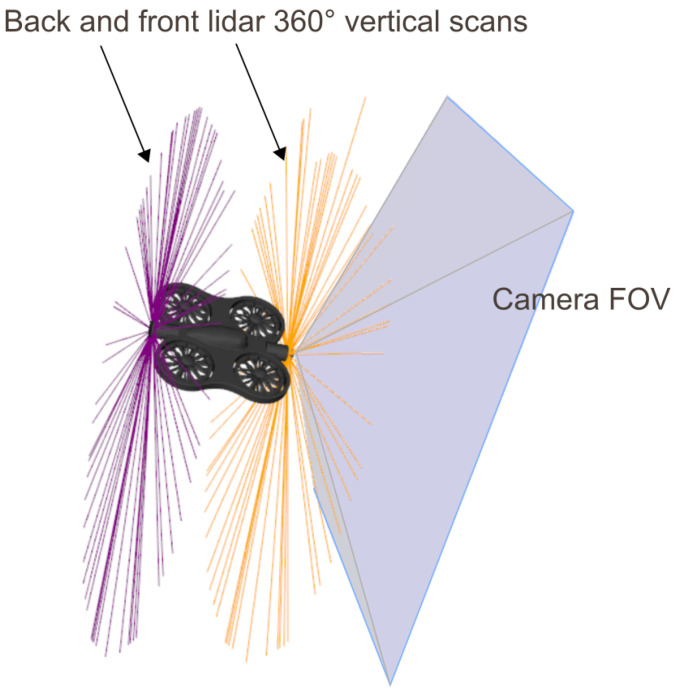 Figure 3
Figure 3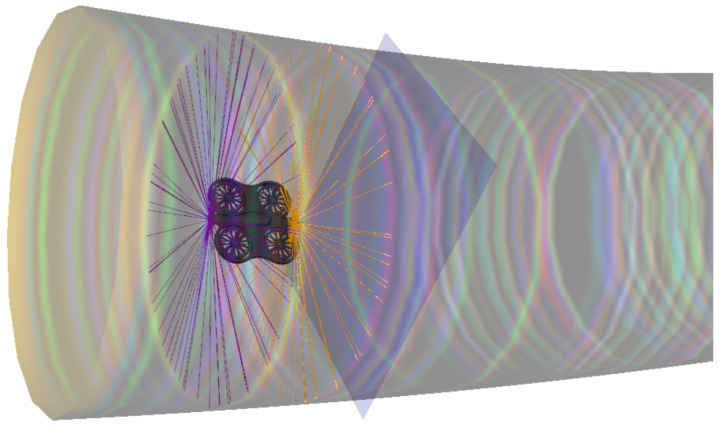 Figure 4
Figure 4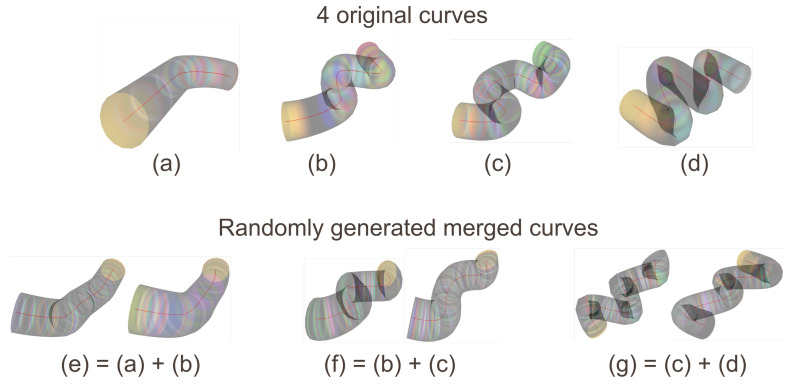 Figure 5
Figure 5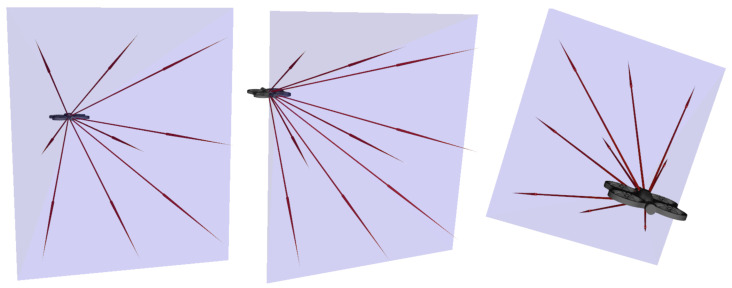 Figure 6
Figure 6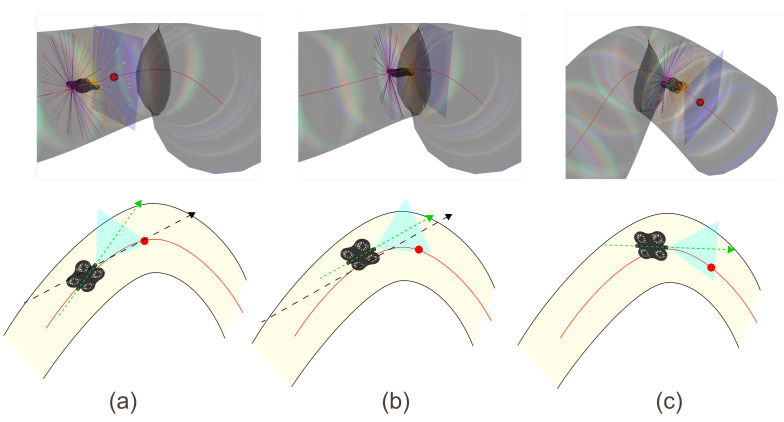 Figure 7
Figure 7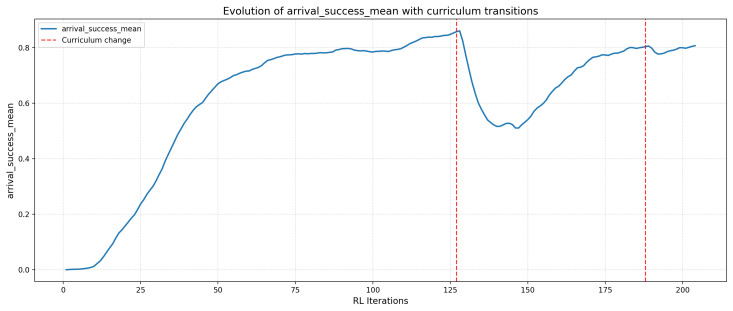 Figure 8
Figure 8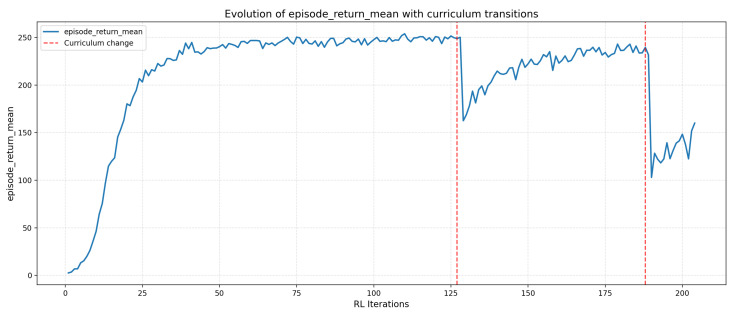 Figure 9
Figure 9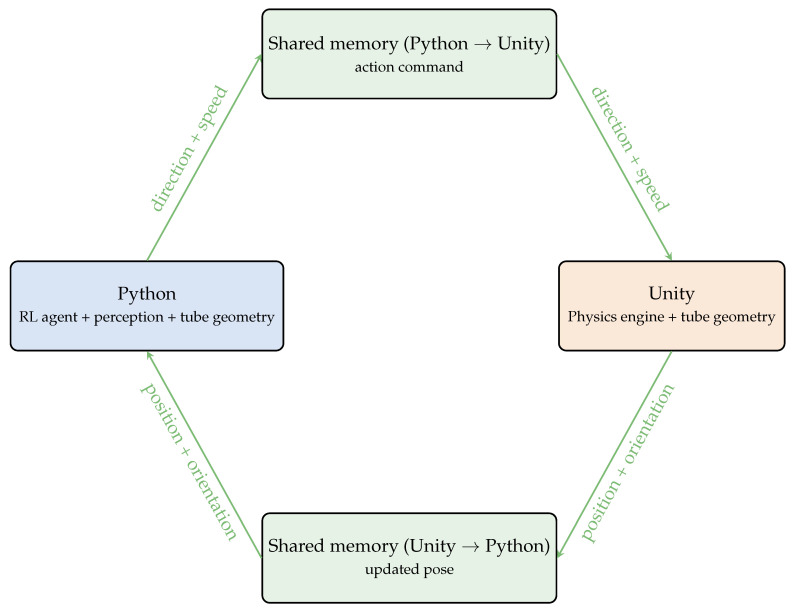 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Robotic Path Planning Algorithms · Distributed Control Multi-Agent Systems