Traffic-Oriented Three-Dimensional Vehicle Reconstruction Using Fixed Roadside Monocular Camera Sensors
Chu Zhang, Yuxin Zhang, Liangbin Li, Xianhua Cai

TL;DR
A new framework uses roadside cameras to accurately reconstruct 3D vehicle shapes in real-world traffic, improving efficiency and accuracy.
Contribution
A traffic-oriented framework that combines semantic and non-semantic features for efficient 3D vehicle reconstruction from monocular cameras.
Findings
The method reduces mean reprojection error by 13.6% compared to conventional SfM methods.
Reconstruction time is shortened by 43.9% using the proposed framework.
Abstract
What are the main findings? A traffic-oriented framework enables reliable 3D vehicle reconstruction using fixed roadside monocular camera sensors under real-world traffic conditions.Joint use of semantic and non-semantic feature points significantly improves reconstruction accuracy and efficiency compared with conventional incremental SfM methods. A traffic-oriented framework enables reliable 3D vehicle reconstruction using fixed roadside monocular camera sensors under real-world traffic conditions. Joint use of semantic and non-semantic feature points significantly improves reconstruction accuracy and efficiency compared with conventional incremental SfM methods. What are the implications of the main findings? Existing roadside camera infrastructures can be leveraged to enhance three-dimensional traffic perception without additional sensing hardware.The proposed approach supports…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
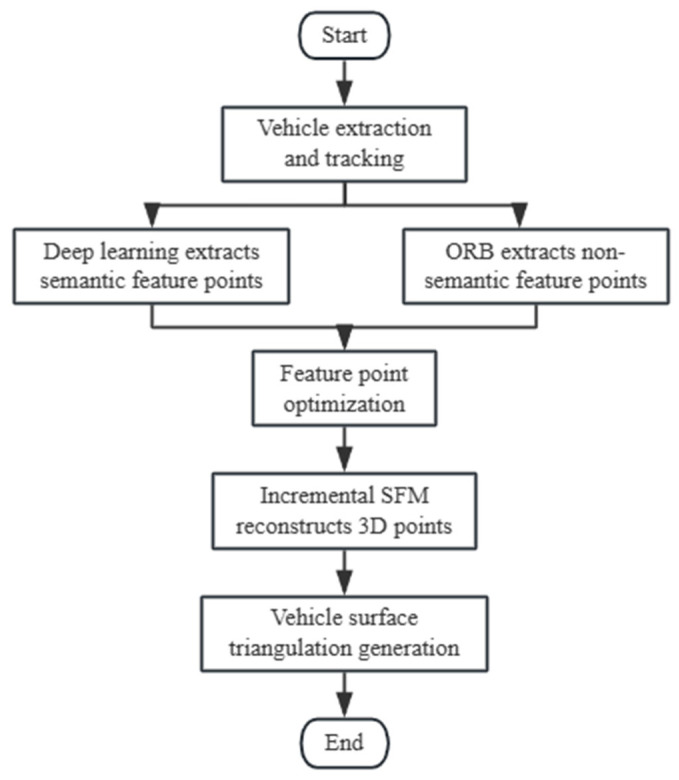 Figure 1
Figure 1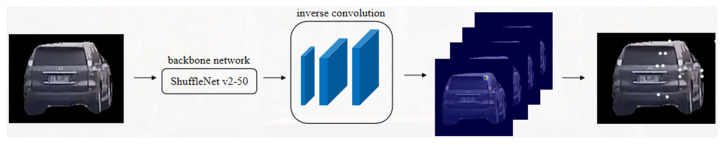 Figure 2
Figure 2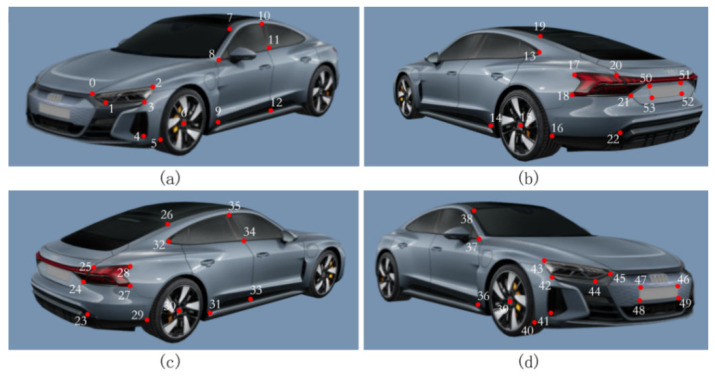 Figure 3
Figure 3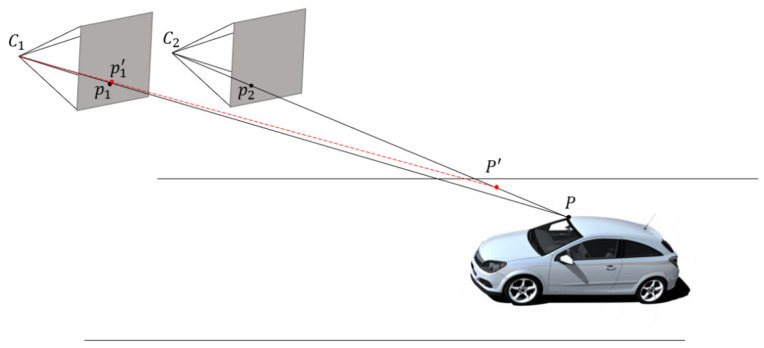 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Neural Network Applications · Autonomous Vehicle Technology and Safety