A Cable-Driven Hybrid Robot with Series-Parallel Coupling: Design, Modeling, Optimization Analysis, and Trajectory Tracking
Zhifu Xue, Zhiquan Yang, Junyi Hu, Bin Zhu, Jianqing Peng

TL;DR
This paper introduces a new hybrid robot combining serial and parallel cable systems for complex tasks, with modeling, optimization, and calibration methods.
Contribution
A novel cable-driven hybrid robot with series-parallel coupling and methods for modeling, workspace analysis, and self-calibration.
Findings
A modular CDHR design with an 8-cable parallel drive and a 4-DOF serial manipulator was developed.
Optimized anchor seat positions improved the statics and force-closure workspace analysis.
Experimental validation confirmed the effectiveness of the proposed methods in simulations and a physical prototype.
Abstract
Compared to purely serial robots or cable-driven parallel robots (CDPRs), cable-driven hybrid robots (CDHRs) combine the advantages of both, addressing their limitations and enabling the execution of complex tasks. The series-parallel coupling structure increases the complexity of the system, complicating modeling, calibration, and force-closure workspace (FCW) analysis. This study develops a CDHR system equipped with various sensors and proposes methods for series-parallel coupling modeling, workspace analysis, and self-calibration of complex systems. First, the modular design requirements for the CDHR are analyzed, comprising an 8-cable parallel drive and a 4-degree-of-freedom serial manipulator. Second, a kinematic model of the CDHR with series-parallel coupling was derived, and the positions of the dynamic anchor seats were optimized using an optimization algorithm. Based on these…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
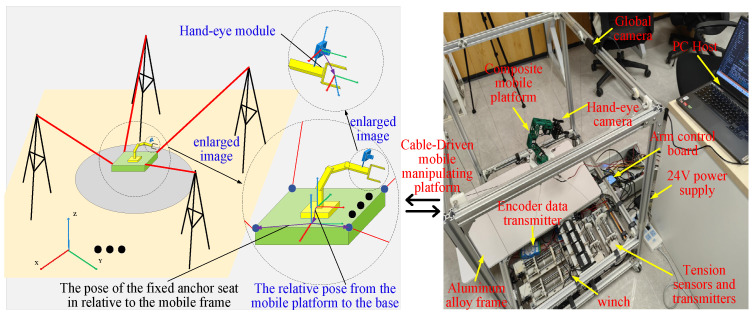 Figure 1
Figure 1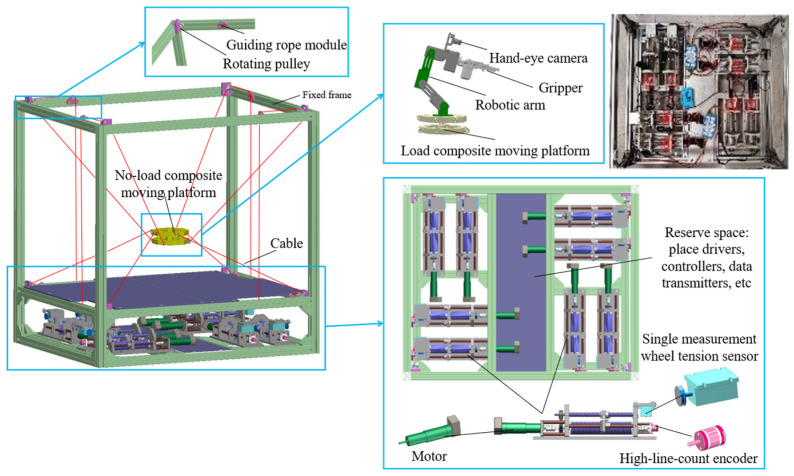 Figure 2
Figure 2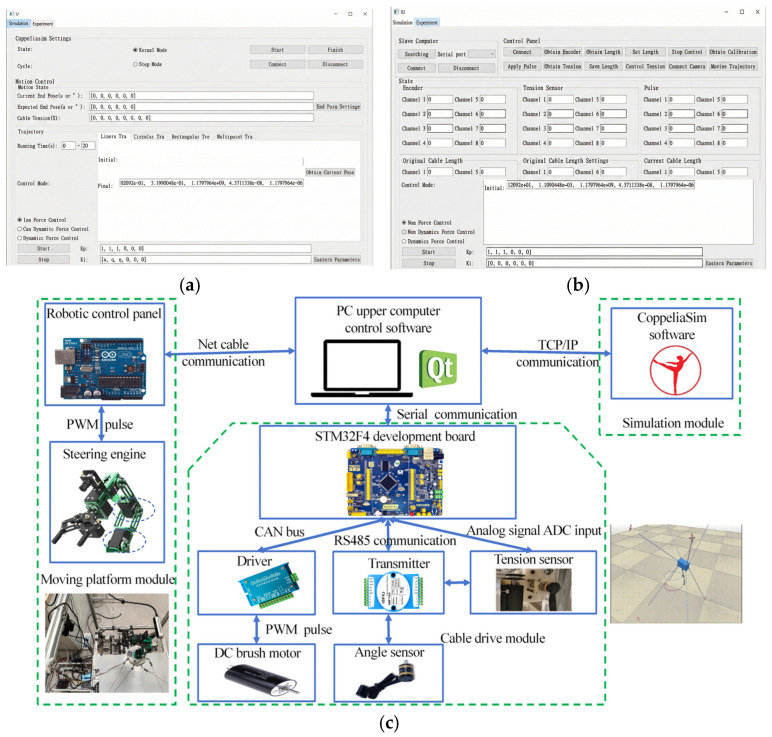 Figure 3
Figure 3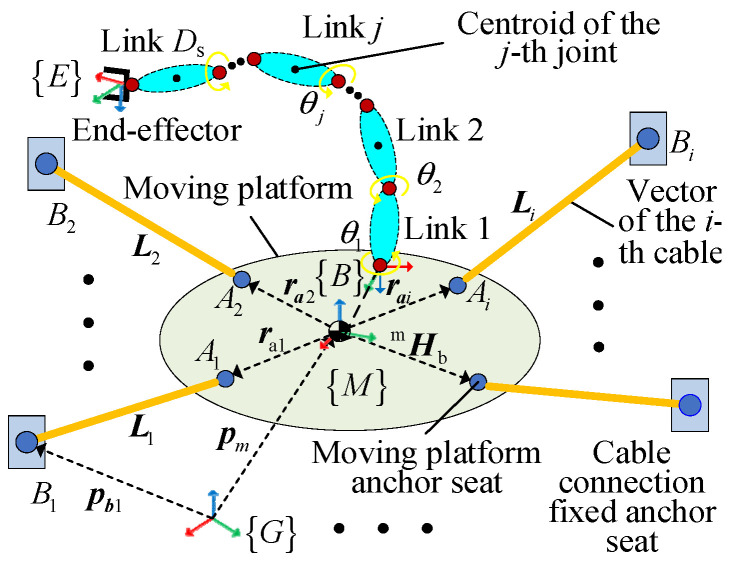 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12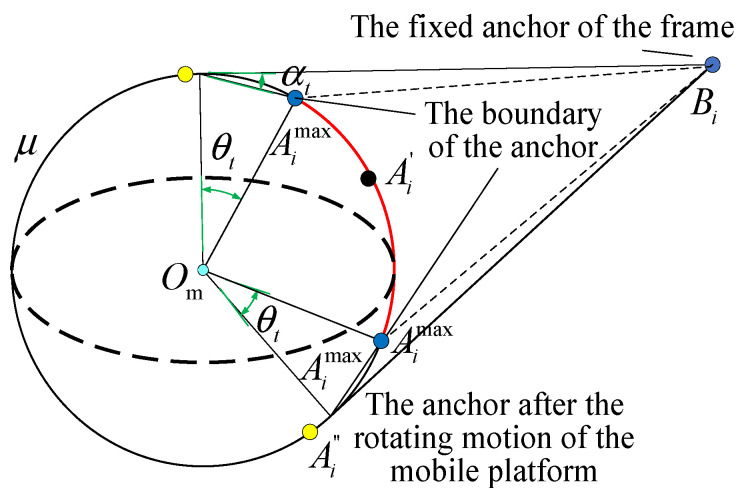 Figure 13
Figure 13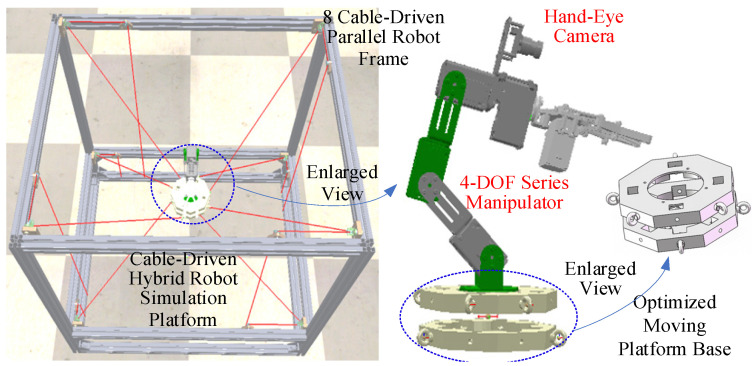 Figure 14
Figure 14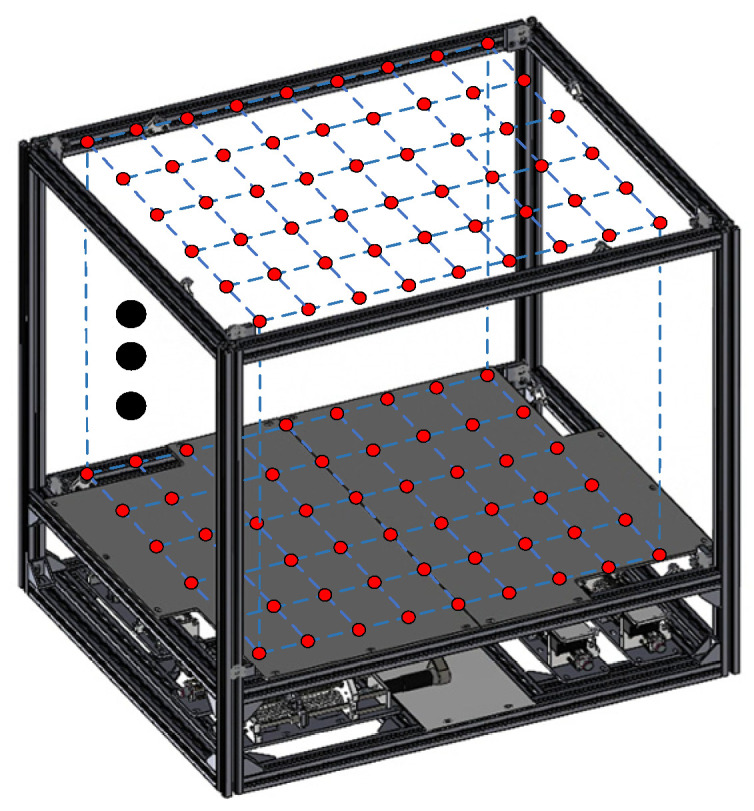 Figure 15
Figure 15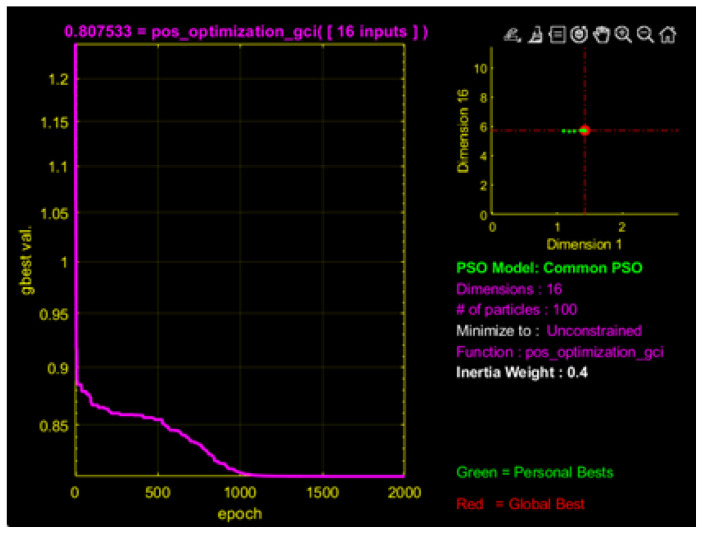 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20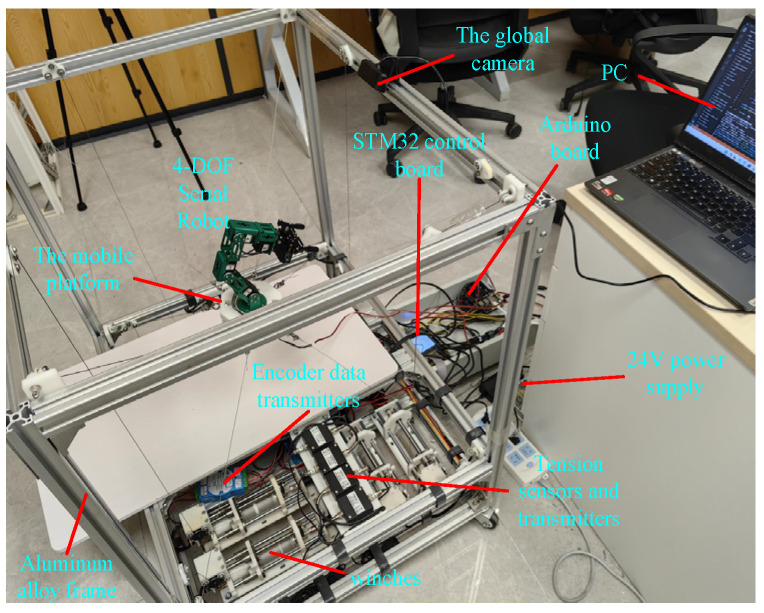 Figure 21
Figure 21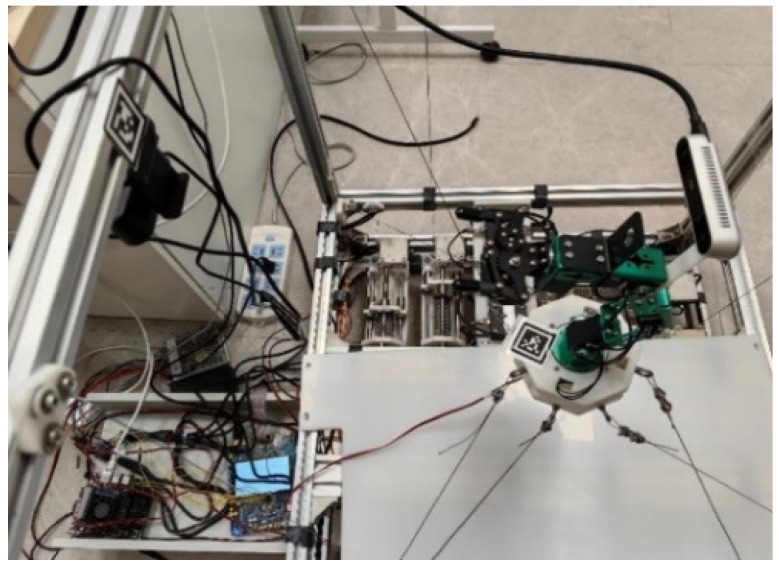 Figure 22
Figure 22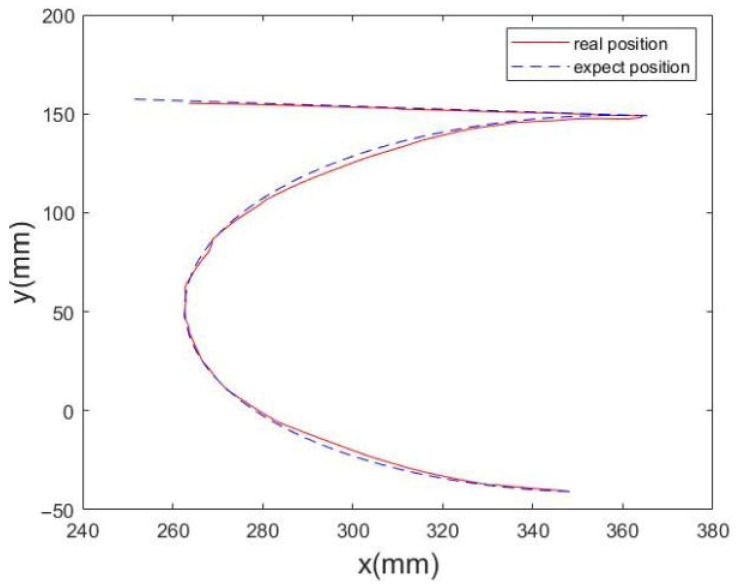 Figure 23
Figure 23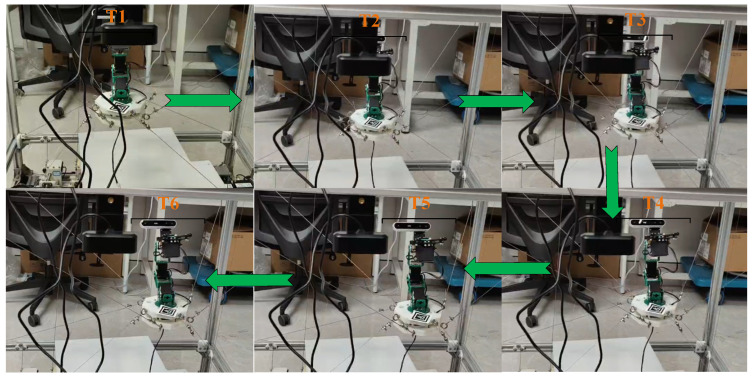 Figure 24
Figure 24 Figure 25
Figure 25Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Mechanisms and Dynamics · Dynamics and Control of Mechanical Systems · Space Satellite Systems and Control