High-Resolution Contact Localization and Three-Axis Force Estimation with a Sparse Strain-Node Tactile Interface Device
Yanyan Wu, Hanhan Wu, Yifei Han, Yi Ding, Bosheng Cao, Chongkun Xia

TL;DR
This paper introduces a tactile device that can accurately detect contact points and forces using a minimal number of sensors, enabling efficient and cost-effective robotic interaction.
Contribution
The novel SSTID device and SCDF framework enable joint contact localization and three-axis force estimation with only nine strain channels.
Findings
The SSTID device achieves accurate contact localization and three-axis force estimation using nine strain channels.
The SCDF framework, trained via a two-stage sim-to-real strategy, enables full-workspace characterization.
The approach supports low-cost and scalable deployment of sparse tactile interfaces.
Abstract
High-resolution contact localization and three-axis force estimation are crucial for human–robot interaction and precision manipulation, yet the sensing area is limited by channel density and wiring cost. Sparse strain readout makes joint estimation of location and three-axis force challenging due to cross-axis coupling and nonlinear responses, while dense arrays or extensive calibration increase complexity. We present a sparse strain-node tactile interface device (SSTID) whose three-module layout is optimized via particle swarm optimization to maximize informative response overlap, enabling contact localization (x,y) and three-axis force (Fx,Fy,Fz) estimation using only nine strain channels. We further propose a strain-node contact-state decoding framework (SCDF) implemented with a lightweight multilayer perceptron and trained via a two-stage sim-to-real strategy, including FEM…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
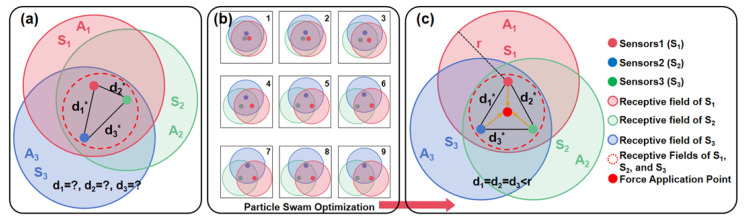 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4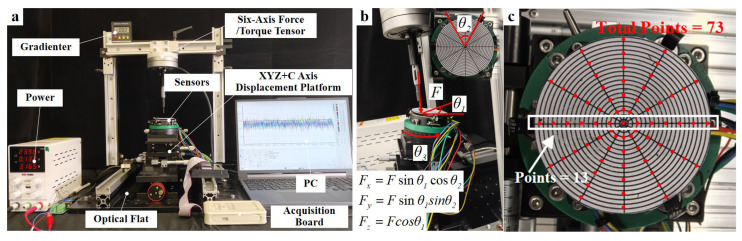 Figure 5
Figure 5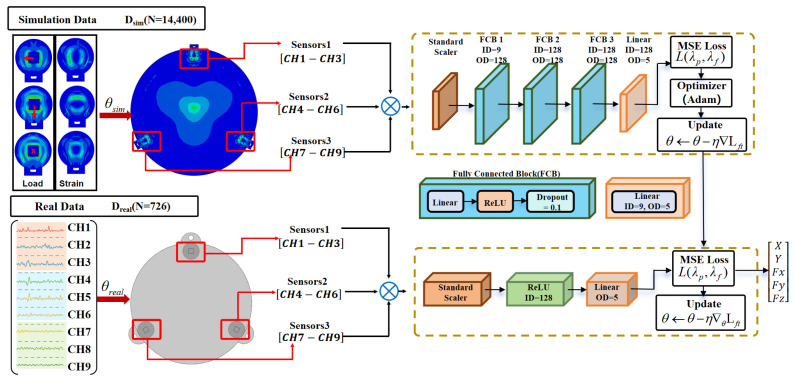 Figure 6
Figure 6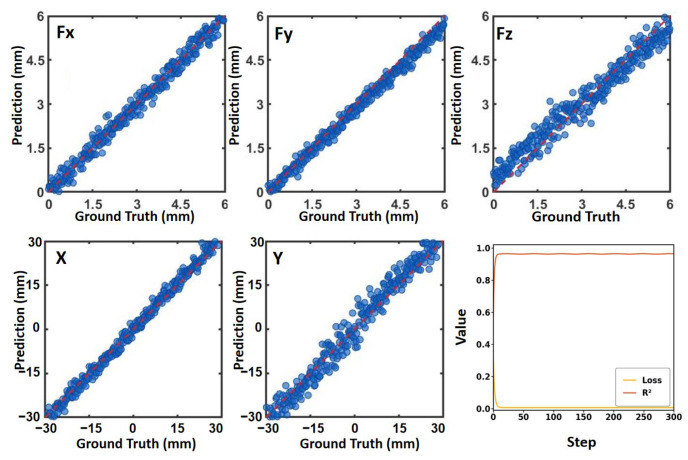 Figure 7
Figure 7 Figure 8
Figure 8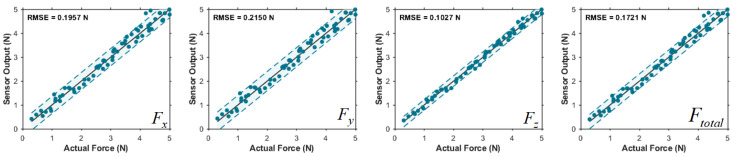 Figure 9
Figure 9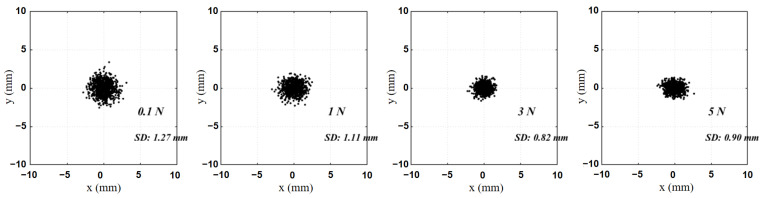 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Sensor and Energy Harvesting Materials · Robot Manipulation and Learning · Tactile and Sensory Interactions