Semantic Segmentation and Effect Optimization of 3D Point Cloud Based on 2D Semantic Segmentation and Clustering for Construction Machinery Unstructured Environment
Shengjie Fu, Qipeng Cai, Zhongshen Li, Wentao Wang, Tianliang Lin, Qihuai Chen, Zhaoyuan Yao

TL;DR
This paper introduces a cost-effective method for 3D object perception in construction environments using 2D image data and clustering techniques.
Contribution
A weakly supervised 3D semantic perception framework that uses 2D image labels and clustering to avoid expensive 3D point cloud annotations.
Findings
The method achieves a mean Pixel Accuracy (mPA) of 84.72% in 3D semantic perception.
It attains a mean Intersection over Union (mIoU) of 75.85% in reconstructing target contours.
Validation was performed using a custom unstructured scene dataset and real-world testing.
Abstract
The operational environment of construction machinery is predominantly unstructured, characterized by rapid changes, high complexity, and irregularly distributed objects. This poses significant challenges for 3D semantic perception, particularly due to the high cost of acquiring point cloud semantic labels. To address this, a novel 3D semantic perception scheme is proposed for such unstructured environments. This scheme integrates image semantic segmentation results with point cloud clustering via perspective projection. The projection parameters are refined using Particle Swarm Optimization (PSO), and the semantic consistency of the fused results is further enhanced by a Kd-tree-based radius nearest neighbor (RNN) matching algorithm. Consequently, a weakly supervised framework is established that achieves accurate 3D semantic understanding using only 2D image labels, eliminating the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2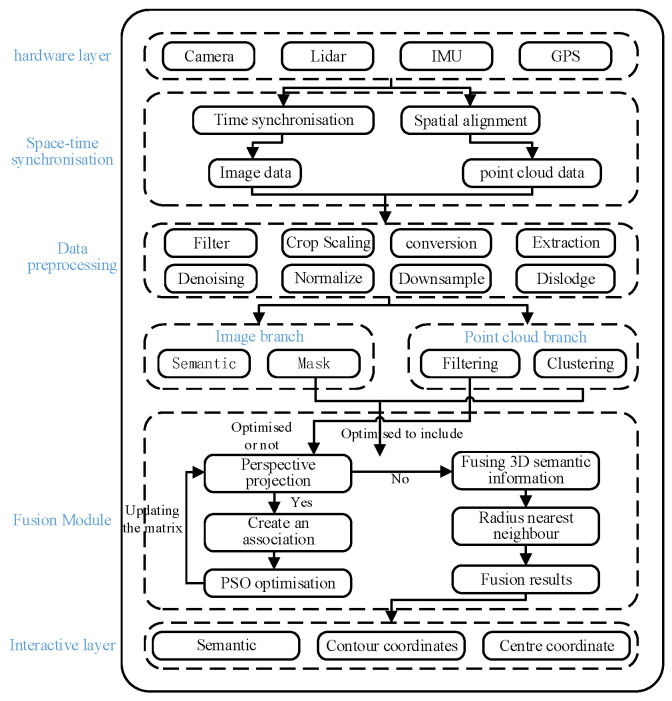 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13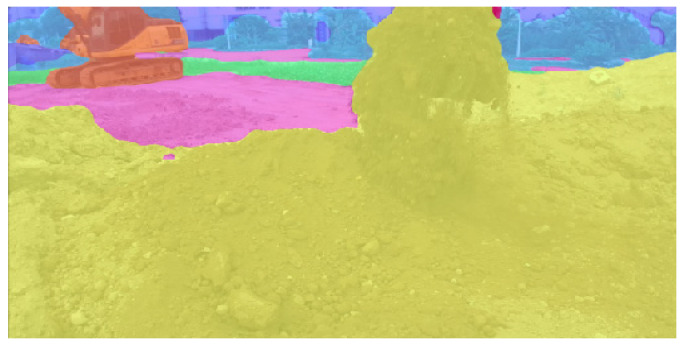 Figure 14
Figure 14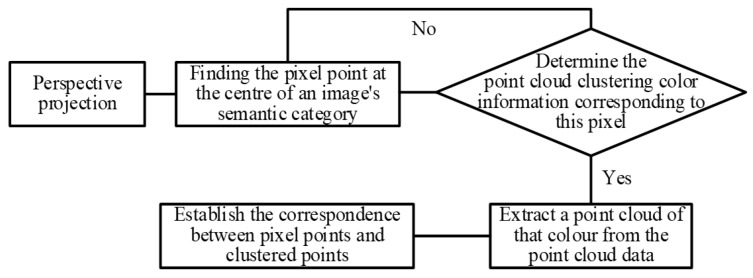 Figure 15
Figure 15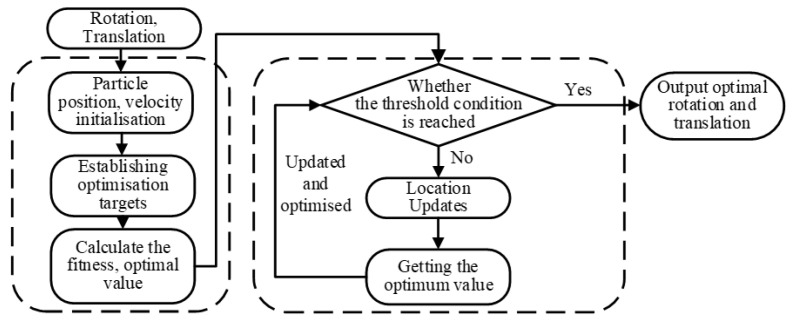 Figure 16
Figure 16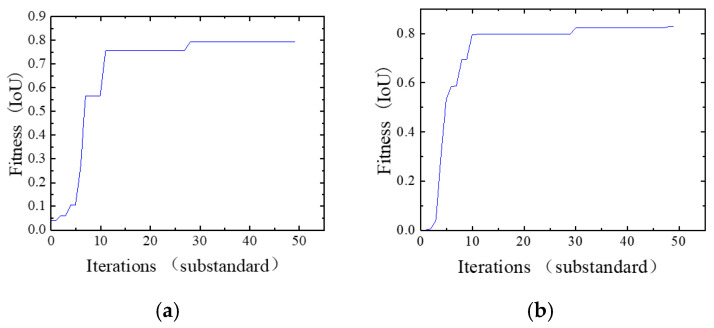 Figure 17
Figure 17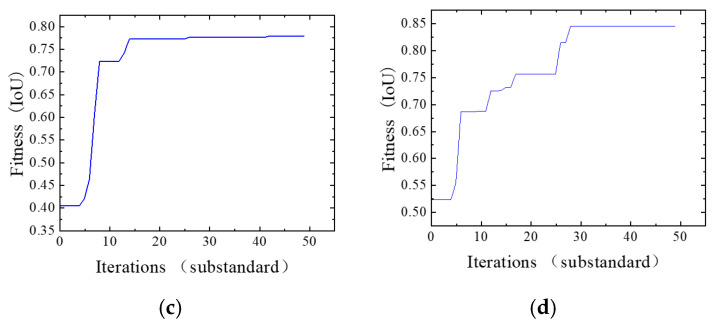 Figure 18
Figure 18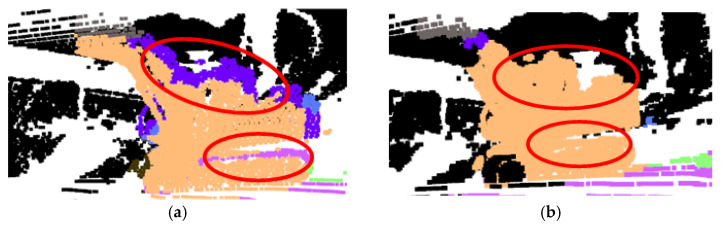 Figure 19
Figure 19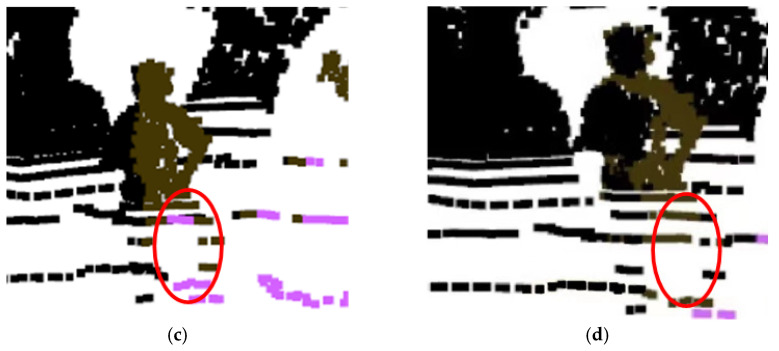 Figure 20
Figure 20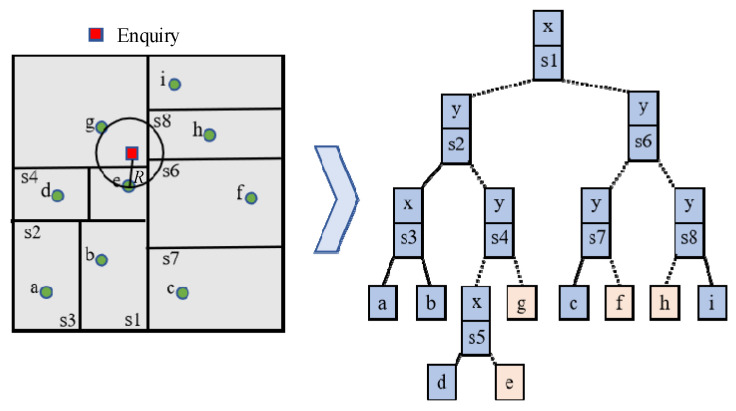 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
Topics3D Surveying and Cultural Heritage · 3D Shape Modeling and Analysis · Robotics and Sensor-Based Localization