An Underwater 6-DoF Position and Orientation Estimation Method for Divers Based on the VideoPose5CH Model
Kaidong Wang, Yi Yang, Qingbo Wei, Xingqun Zhou, Zhiqiang Hu, Quan Zheng

TL;DR
This paper introduces a new method for estimating a diver's position and orientation underwater using a deep learning model called VideoPose5CH.
Contribution
The paper proposes a novel framework and network architecture, VideoPose5CH, for 6-DoF estimation of divers in underwater environments.
Findings
The proposed method achieves stable 6-DoF estimation for divers within a distance range of 2.643 m to 11.477 m.
Average position errors are 7.33 cm, 4.04 cm, and 27.15 cm along the three axes.
Average orientation errors are 6.96°, 8.47°, and 2.62°.
Abstract
Accurate perception of a diver’s position and orientation by Autonomous Underwater Vehicles (AUVs) is essential for effective human–robot collaboration in underwater environments. However, conventional position and orientation estimation methods that combine deep learning with Perspective-n-Point (PnP) algorithms are primarily designed for rigid objects. In contrast, divers exhibit highly variable postures underwater, with no fixed configuration. To address this limitation, this paper proposes a framework for estimating the six-degree-of-freedom (6-DoF) position and the orientation of a diver. In addition, a novel network architecture, termed “VideoPose5CH,” is proposed. In the proposed framework, temporal sequences of 2D joint coordinates are provided to VideoPose5CH, which then outputs the 3D joint coordinates of the current frame as well as the corresponding refined 2D joint…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
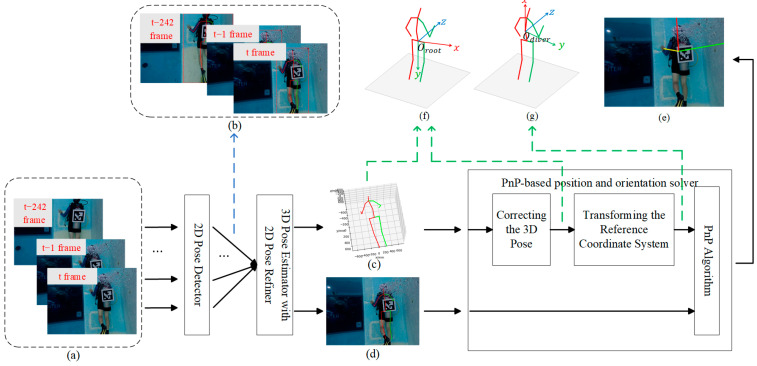 Figure 1
Figure 1 Figure 2
Figure 2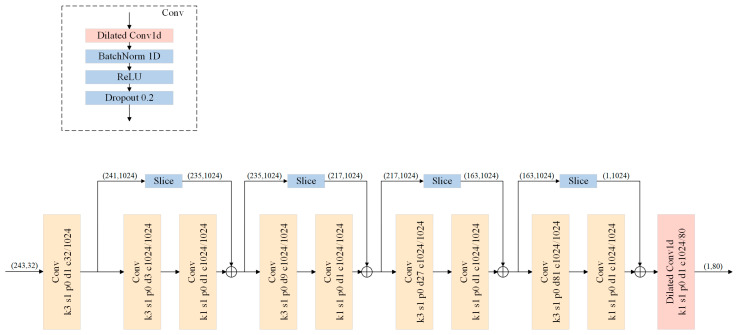 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9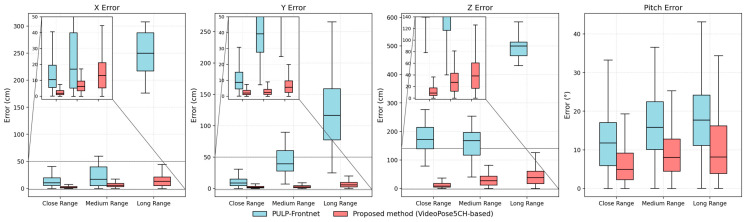 Figure 10
Figure 10 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUnderwater Vehicles and Communication Systems · Robotics and Sensor-Based Localization · Hand Gesture Recognition Systems