Design of a 3D High-Definition Map Visualizer for Pose Estimation and Autonomous Navigation in Dynamic Environments
Yunchen Ge, Marcelo Contreras, Neel P. Bhatt, Ehsan Hashemi

TL;DR
This paper introduces a 3D HD map visualizer that helps autonomous vehicles navigate dynamic environments by integrating visual and LiDAR data in real-time.
Contribution
The novel contribution is a real-time HD map framework with synchronized multimodal data and a semantic-aware pose estimation module for autonomous navigation.
Findings
The framework generates accurate and interpretable HD maps for autonomous navigation in dynamic environments.
The semantic-aware visual odometry module performs well under perceptually degraded conditions.
The system is validated in urban scenarios with intermittent GNSS and can be used as a benchmarking tool.
Abstract
A high-definition (HD) map development framework providing real-time visualization of multimodal perception data for state estimation, motion planning, and decision-making in autonomous navigation is presented and experimentally validated. The proposed framework integrates synchronized visual and LiDAR data and generates consistent frame transformations to construct accurate and interpretable HD maps suitable for navigation in dynamic environments. In addition, the framework enables flexible customization of essential map elements, including road features and static landmarks, facilitating efficient map generation and visualization. Building upon the developed HD map visualizer, a semantic-aware visual odometry (VO)-based pose estimation module is designed and verified through extensive evaluations and under perceptually degraded conditions. To ensure the reliability of synchronized…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
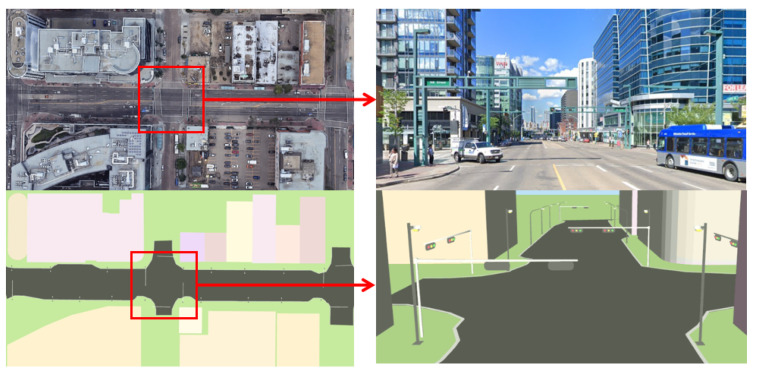 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5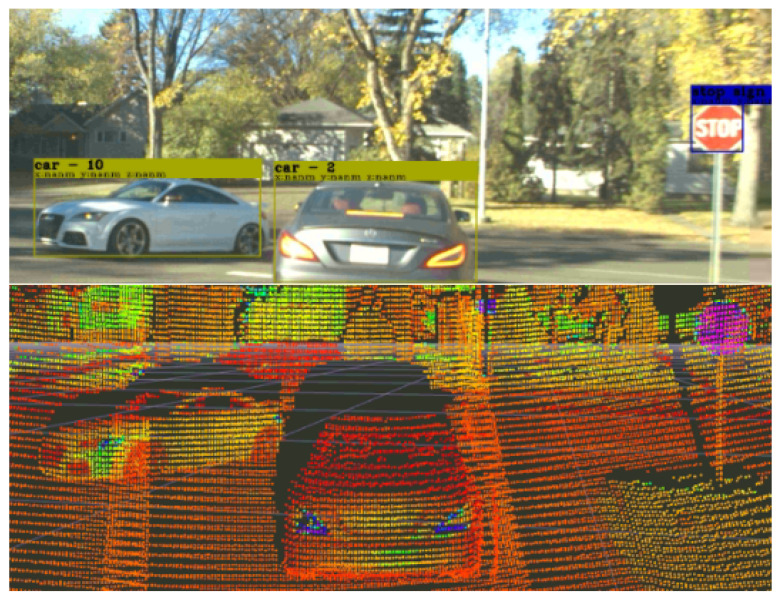 Figure 6
Figure 6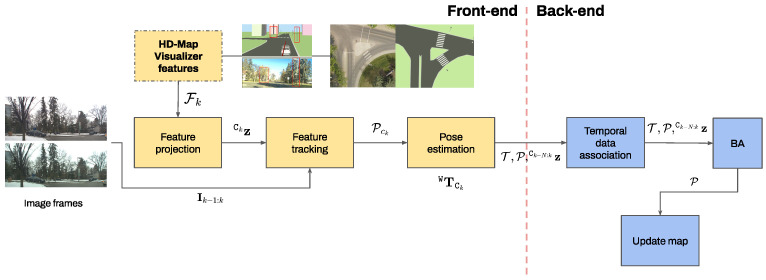 Figure 7
Figure 7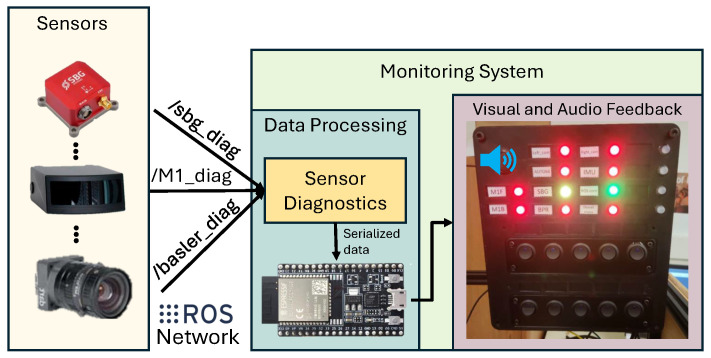 Figure 8
Figure 8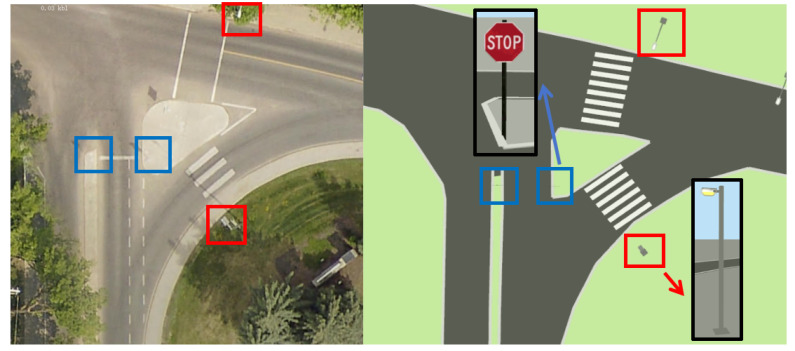 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Automated Road and Building Extraction · Tactile and Sensory Interactions