Geometry-Aware Human Noise Removal from TLS Point Clouds via 2D Segmentation Projection
Fuga Komura, Daisuke Yoshida, Ryosei Ueda

TL;DR
This paper introduces a new method to automatically remove human noise from large-scale 3D laser scan data using 2D segmentation and geometric filtering, achieving high accuracy and efficiency.
Contribution
A geometry-aware framework for automatic human noise removal in TLS point clouds using 2D segmentation and multi-stage geometric validation.
Findings
The proposed method achieves high precision, recall, and IoU scores on two real-world TLS datasets.
The method demonstrates stable performance on MMS data from the Waymo Open Dataset without recalibration.
Ablation studies confirm the robustness of the framework to reprojection errors.
Abstract
Large-scale terrestrial laser scanning (TLS) point clouds are increasingly used for applications such as digital twins and cultural heritage documentation; however, removing unwanted human points captured during acquisition remains a largely manual and time-consuming process. This study proposes a geometry-aware framework for automatically removing human noise from TLS point clouds by projecting 2D instance segmentation masks (obtained using You Only Look Once (YOLO) v8 with an instance segmentation head) into 3D space and validating candidates through multi-stage geometric filtering. To suppress false positives induced by reprojection misalignment and planar background structures (e.g., walls and ground), we introduce projection-followed geometric validation (or “geometric gating”) using Density-Based Spatial Clustering of Applications with Noise (DBSCAN) and principal component…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
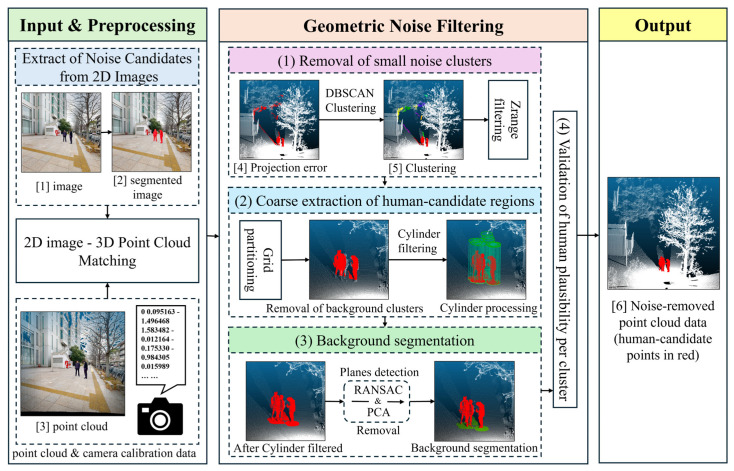 Figure 1
Figure 1 Figure 2
Figure 2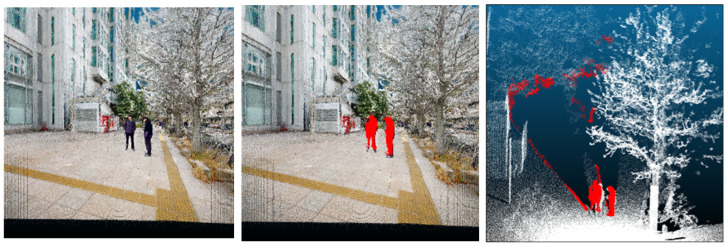 Figure 3
Figure 3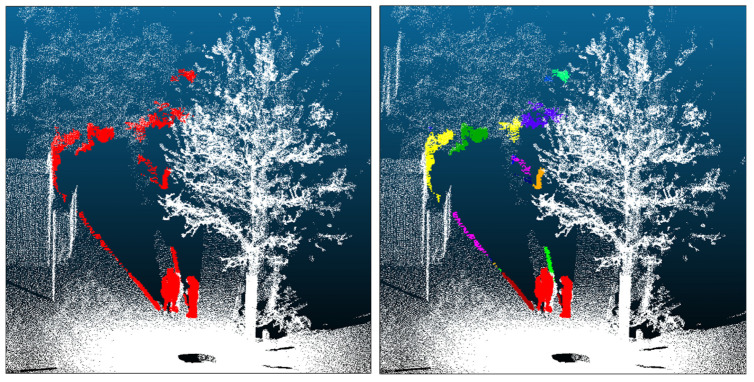 Figure 4
Figure 4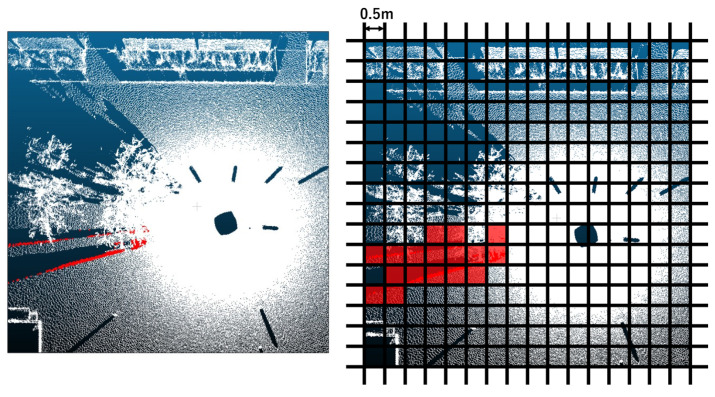 Figure 5
Figure 5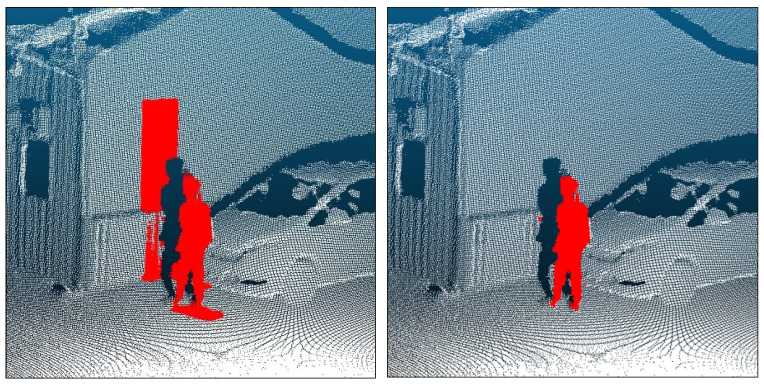 Figure 6
Figure 6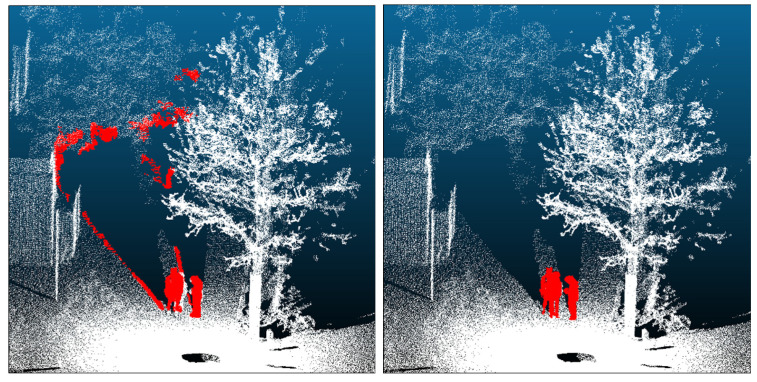 Figure 7
Figure 7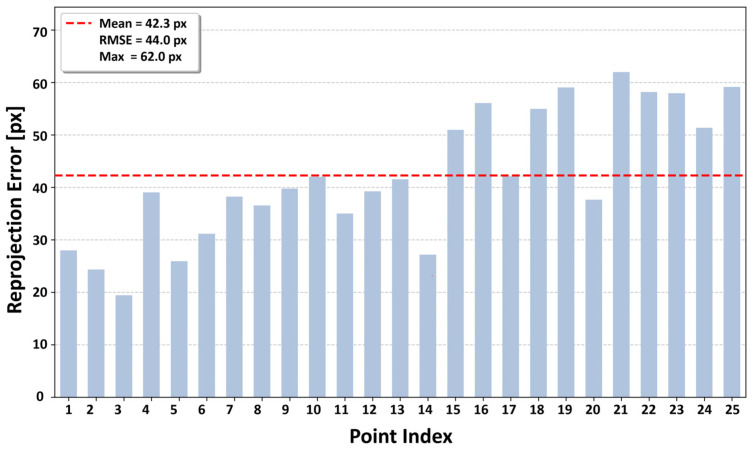 Figure 8
Figure 8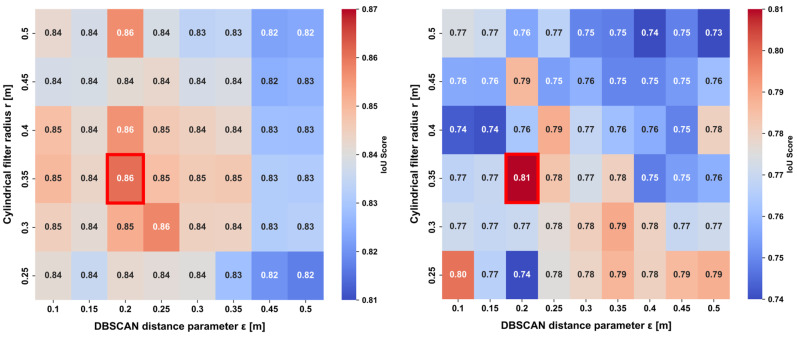 Figure 9
Figure 9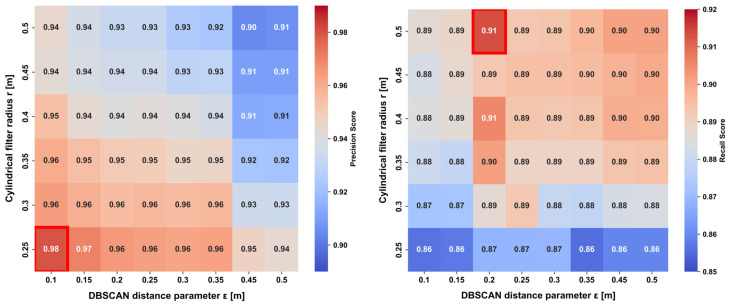 Figure 10
Figure 10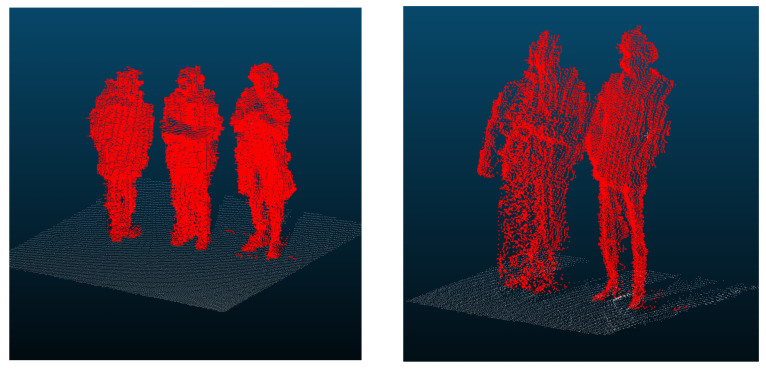 Figure 11
Figure 11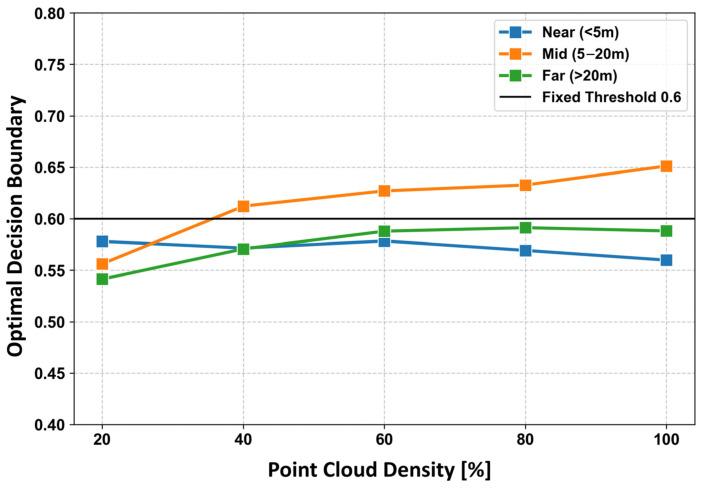 Figure 12
Figure 12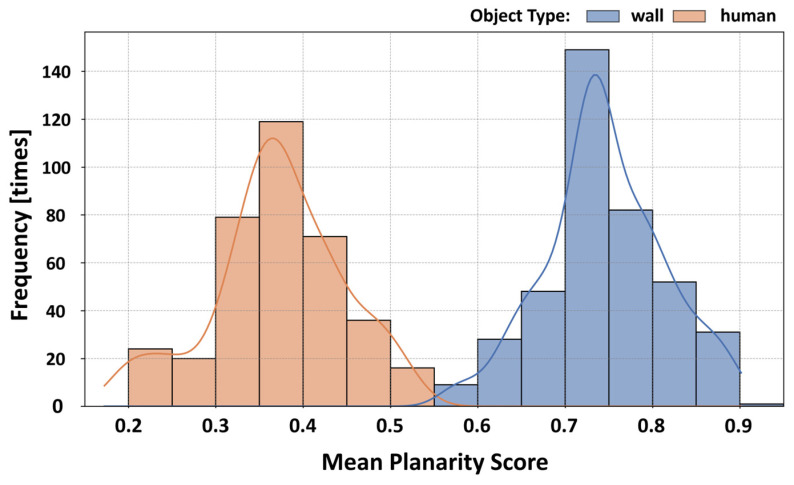 Figure 13
Figure 13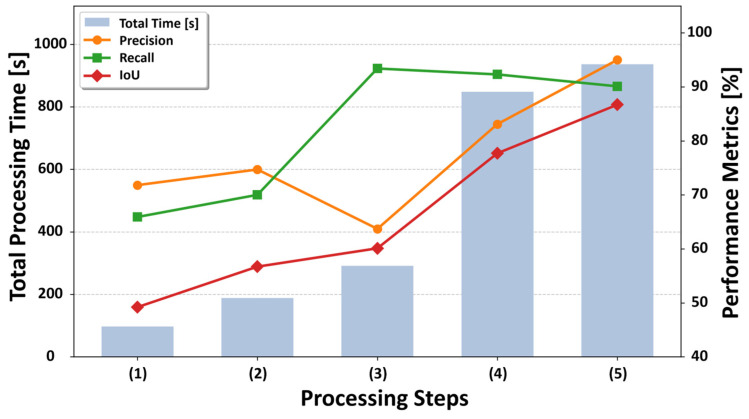 Figure 14
Figure 14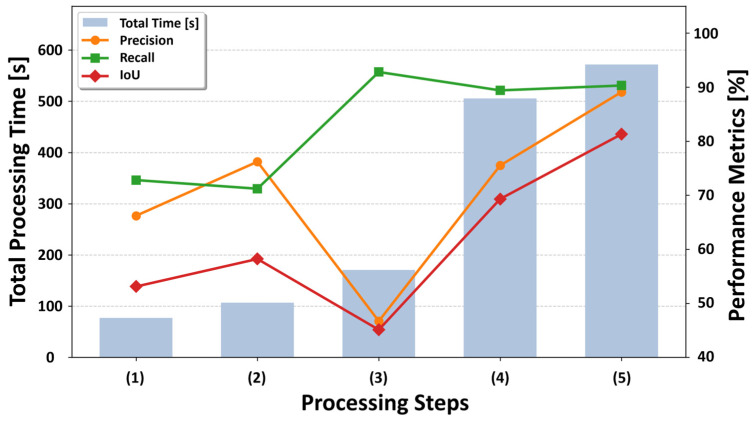 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRemote Sensing and LiDAR Applications · 3D Surveying and Cultural Heritage · Robotics and Sensor-Based Localization