Context-Aware Semantic Localization with Adaptive Sensor Fusion Under Adverse Conditions
Jun-Hyeon Choi, Dong-Su Seo, Ye-Chan An, Tae-Wook Eum, Jin-Ho Kim, Gi-Hyeon Kwon, Tae-Yong Kuc, Jeong-Won Pyo

TL;DR
This paper introduces a semantic localization framework that improves autonomous vehicle accuracy by using context-aware reasoning and adaptive sensor fusion.
Contribution
The novelty lies in integrating ontology-based semantic reasoning into localization as a context-aware constraint selection problem.
Findings
The framework reduces mean and maximum localization errors by 35.6% and 47.0%, respectively.
It enhances robustness under sensor degradation and dynamic environmental conditions.
The design supports cooperative perception scenarios like V2V information sharing.
Abstract
To achieve Level 4 and above autonomous driving, vehicle localization must remain accurate and reliable under diverse real-world conditions, including complex traffic scenarios, environmental changes, and partial sensor failures. Conventional localization approaches primarily rely on geometric consistency among multi-sensor observations, which can produce physically or contextually implausible pose estimates when sensor reliability degrades or observations become ambiguous. This paper proposes a semantic localization framework that integrates ontology-based semantic reasoning directly into the localization process. The proposed approach reformulates localization as a context-aware constraint selection problem guided by semantic consistency among objects, places, and vehicle poses. By evaluating logical and contextual validity at the hypothesis generation stage, semantically invalid pose…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8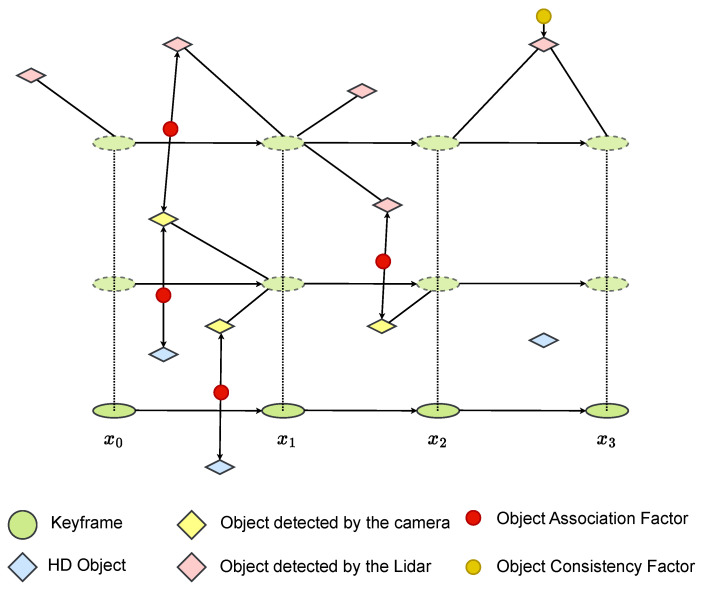 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Neural Network Applications · Autonomous Vehicle Technology and Safety