Enhanced GNSS Navigation Using a Centered Error Entropy Extended Kalman Filter in Non-Gaussian Noise Environments
Yi Chang, Dah-Jing Jwo, Bo-Yang Lee

TL;DR
This paper introduces a new filter for GPS navigation that improves accuracy in environments with unpredictable signal interference and non-Gaussian noise.
Contribution
The paper proposes a novel CEE-EKF algorithm combining the strengths of MEE and MCC for robust navigation in non-Gaussian noise.
Findings
The CEE-EKF outperforms existing methods in noise suppression and outlier handling in GPS environments.
The algorithm achieves better error convergence and robustness in complex nonlinear scenarios.
The approach can be extended to other GNSS applications for improved reliability.
Abstract
Global Navigation Satellite Systems (GNSSs) observables, such as those of the Global Positioning System (GPS), are frequently affected by multipath effects that cause unpredictable signal interference at the receiver, posing significant challenges for accurate state estimation in complex environments with non-Gaussian noise or outliers. The traditional extended Kalman filter (EKF), based on the minimum mean square error (MMSE) criterion, assumes Gaussian noise distributions and exhibits degraded performance under non-Gaussian conditions. To overcome this limitation, the minimum error entropy (MEE) criterion was proposed to reduce random uncertainty in estimation error distributions; however, due to its translation invariance property, MEE may inadvertently increase bias when errors contain systematic offsets, leading to poor convergence. In contrast, the maximum correntropy criterion…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4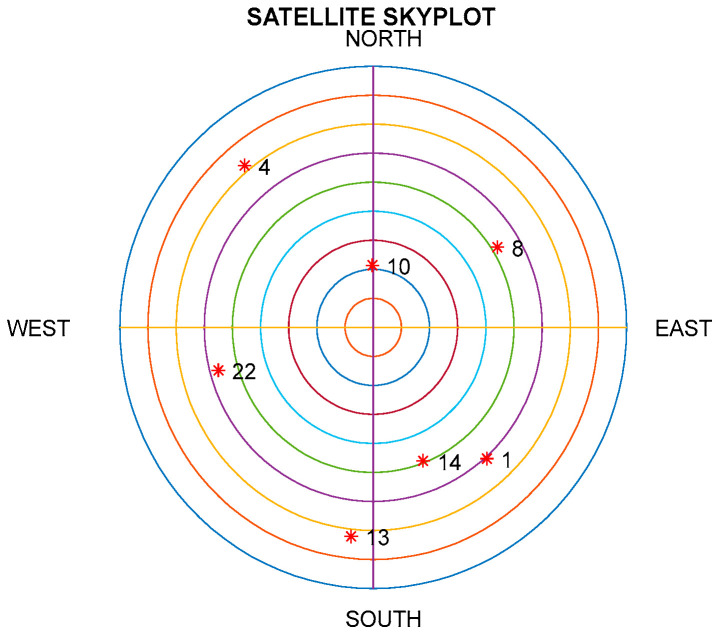 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTarget Tracking and Data Fusion in Sensor Networks · GNSS positioning and interference · Inertial Sensor and Navigation