VCC: Vertical Feature and Circle Combined Descriptor for 3D Place Recognition
Wenguang Li, Yongxin Ma, Jiying Ren, Jinshun Ou, Jun Zhou, Panling Huang

TL;DR
This paper introduces a new 3D descriptor called VCC that improves place recognition in LiDAR-based SLAM systems by being efficient and robust to viewpoint changes.
Contribution
The novel VCC descriptor combines vertical features and circular arc histograms for efficient and rotation-invariant 3D place recognition.
Findings
VCC improves feature representation efficiency and loop closure recognition performance compared to other descriptors.
The algorithm completes loop closure retrieval within 30 ms, meeting real-time operation requirements.
VCC provides a compact and rotation-invariant representation suitable for LiDAR-based SLAM systems.
Abstract
Loop closure detection remains a critical challenge in LiDAR-based SLAM, particularly for achieving robust place recognition in environments with rotational and translational variations. To extract more concise environmental representations from point clouds and improve extraction efficiency, this paper proposes a novel composite descriptor—the vertical feature and circle combined (VCC) descriptor, a novel 3D local descriptor designed for efficient and rotation-invariant place recognition. The VCC descriptor captures environmental structure by extracting vertical features from voxelized point clouds and encoding them into circular arc-based histograms, ensuring robustness to viewpoint changes. Under the same hardware, experiments conducted on different datasets demonstrate that the proposed algorithm significantly improves both feature representation efficiency and loop closure…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1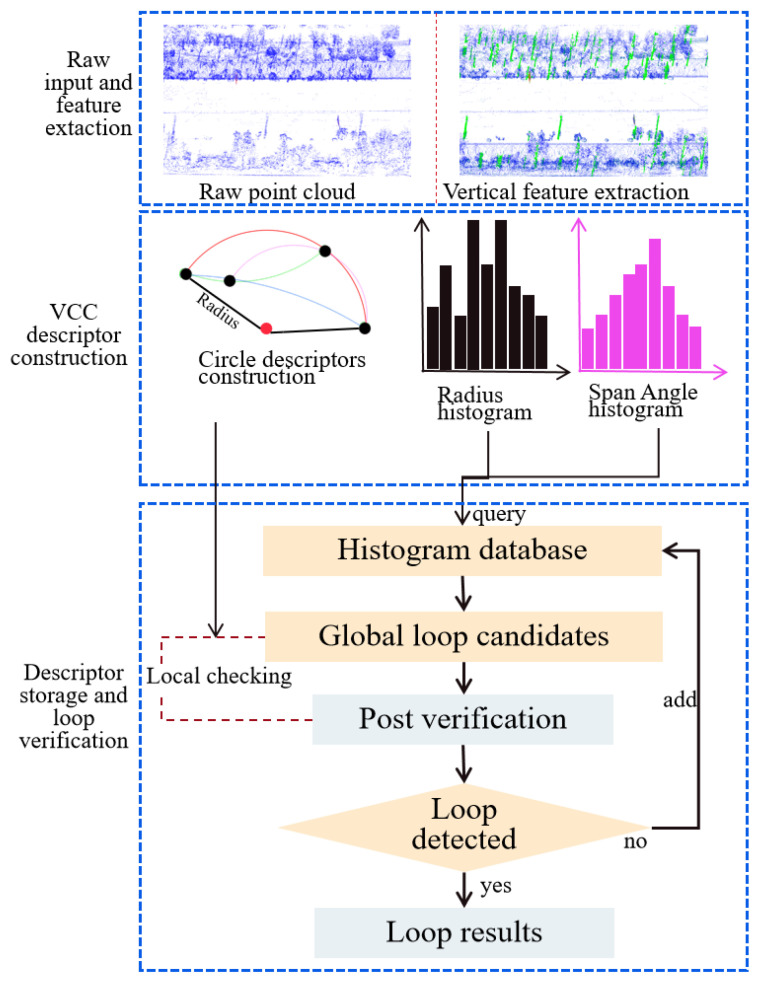 Figure 2
Figure 2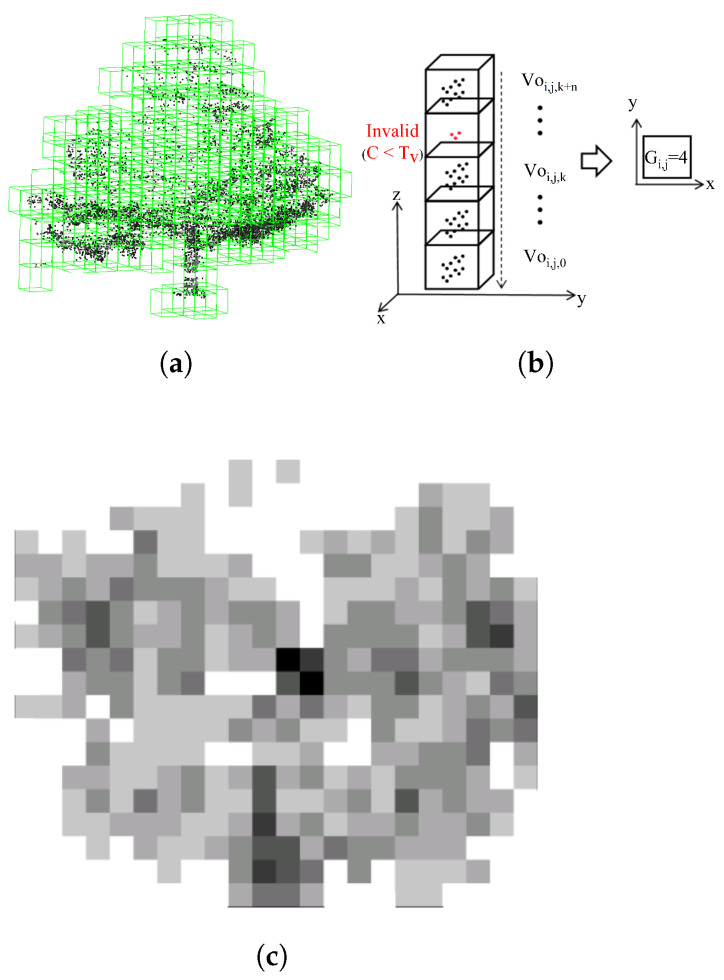 Figure 3
Figure 3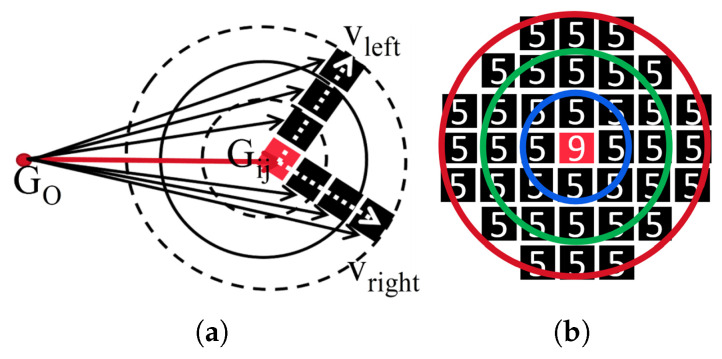 Figure 4
Figure 4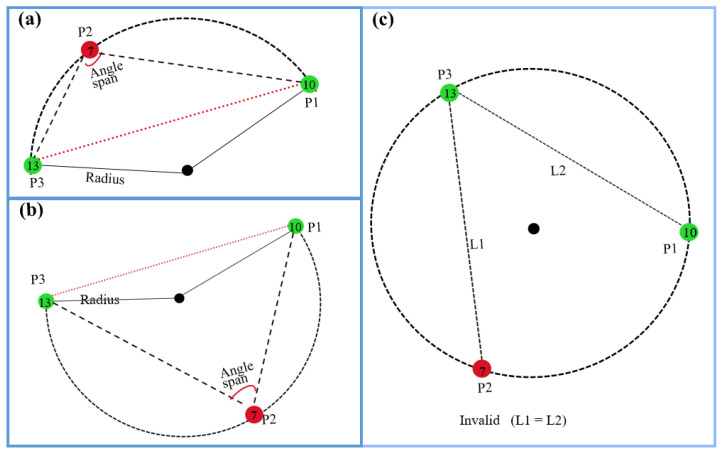 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7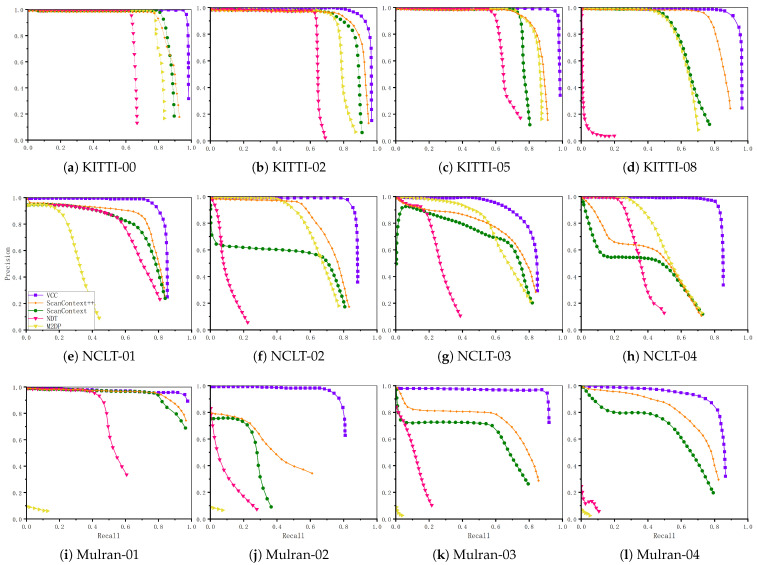 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Image and Video Retrieval Techniques · Remote Sensing and LiDAR Applications