Topological Progress Potential-Enhanced Continuous-Space Ant Colony Algorithm for Robot Path Planning
Guikun Dong, Feixiong Zhao, Jiaxiong Zhuo, Lei Zhou, Qiaoling Liu, Xiangjun Yang

TL;DR
This paper introduces a new robot path planning algorithm that improves efficiency and safety by using a continuous-space ant colony approach with topological guidance.
Contribution
The novel algorithm, TPP-CSACO, uses a perception circle and dual-field guidance to enhance path smoothness and safety in continuous space.
Findings
TPP-CSACO reduces path length by up to 50.6% compared to traditional ACO in the same environment.
The algorithm achieves a 100% success rate with zero safety violations across multiscale constrained maps.
Compared to shortest heuristic algorithms, TPP-CSACO reduces maximum turning angles by 75% to 93%.
Abstract
To address the issues of traditional grid-based Ant Colony Optimization path planning in discretized continuous space—including limited direction freedom, lack of global topological guidance, and difficulty in balancing path smoothness and safety margin—a topological progress potential-enhanced continuous-space ant colony path planning algorithm (TPP-CSACO) is proposed. TPP-CSACO discards grid-based expansion; instead, a perception circle centered on each ant is defined, movement is executed via a sector-based perception framework with probabilistic direction selection, and band-shaped decaying pheromones are deposited along the path. By coupling the global topological progress potential derived from the simplified probabilistic roadmap (PRM) with pheromones, a dual-field guidance mechanism is established to prevent local congestion. Combined with the explicit safety constraints of the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
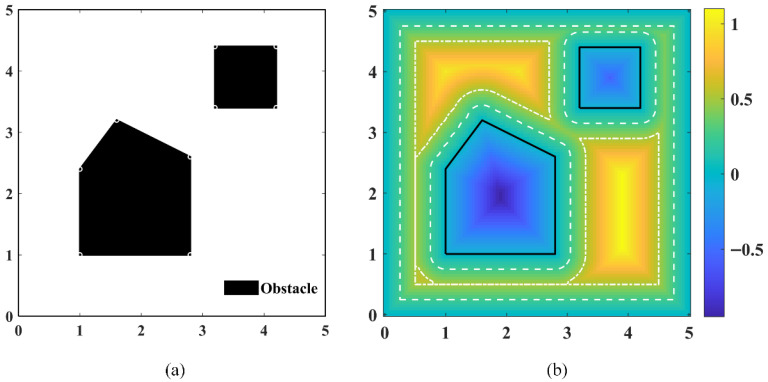 Figure 1
Figure 1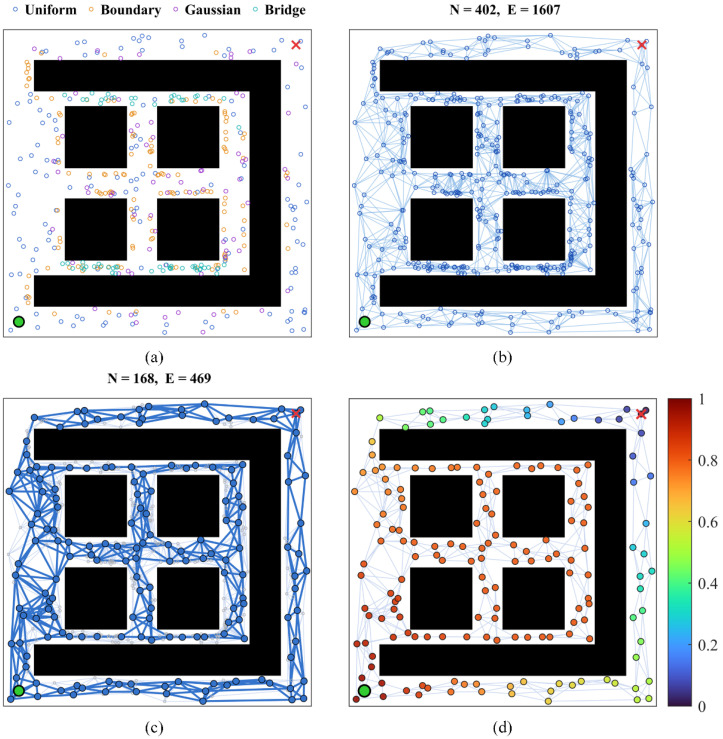 Figure 2
Figure 2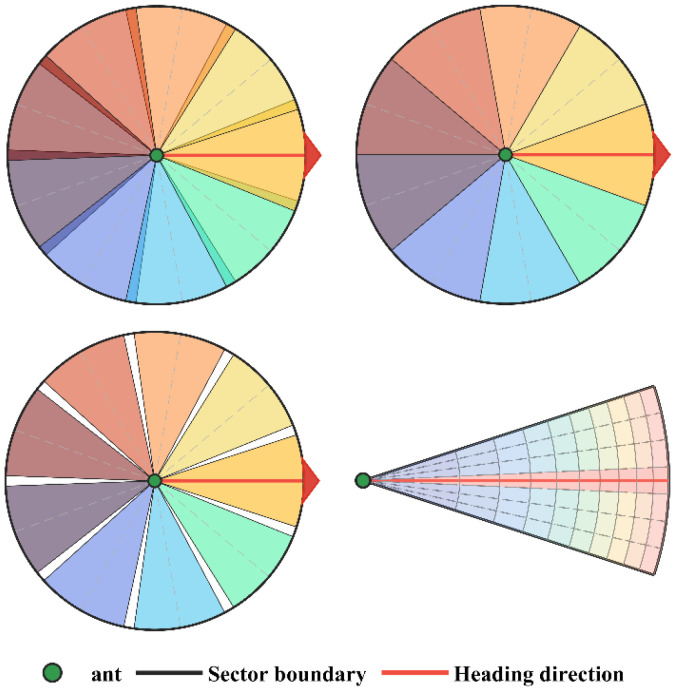 Figure 3
Figure 3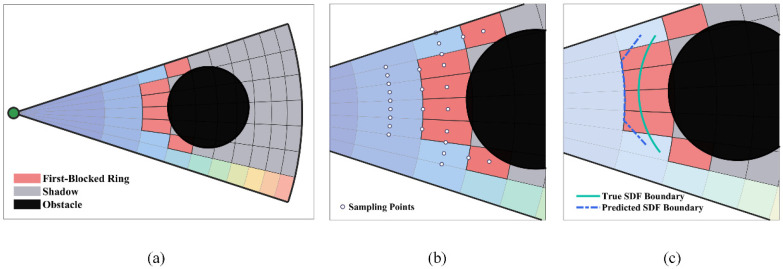 Figure 4
Figure 4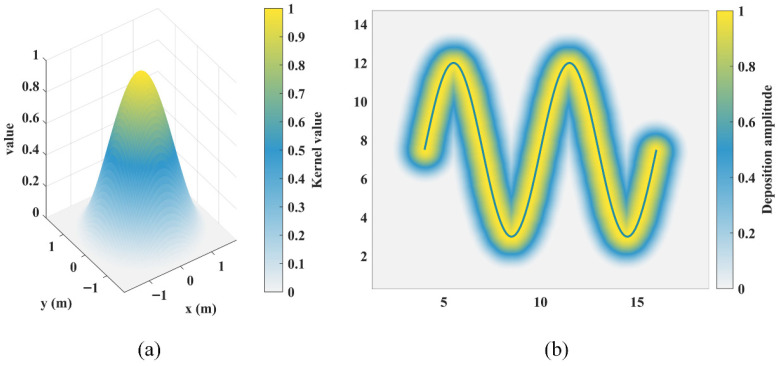 Figure 5
Figure 5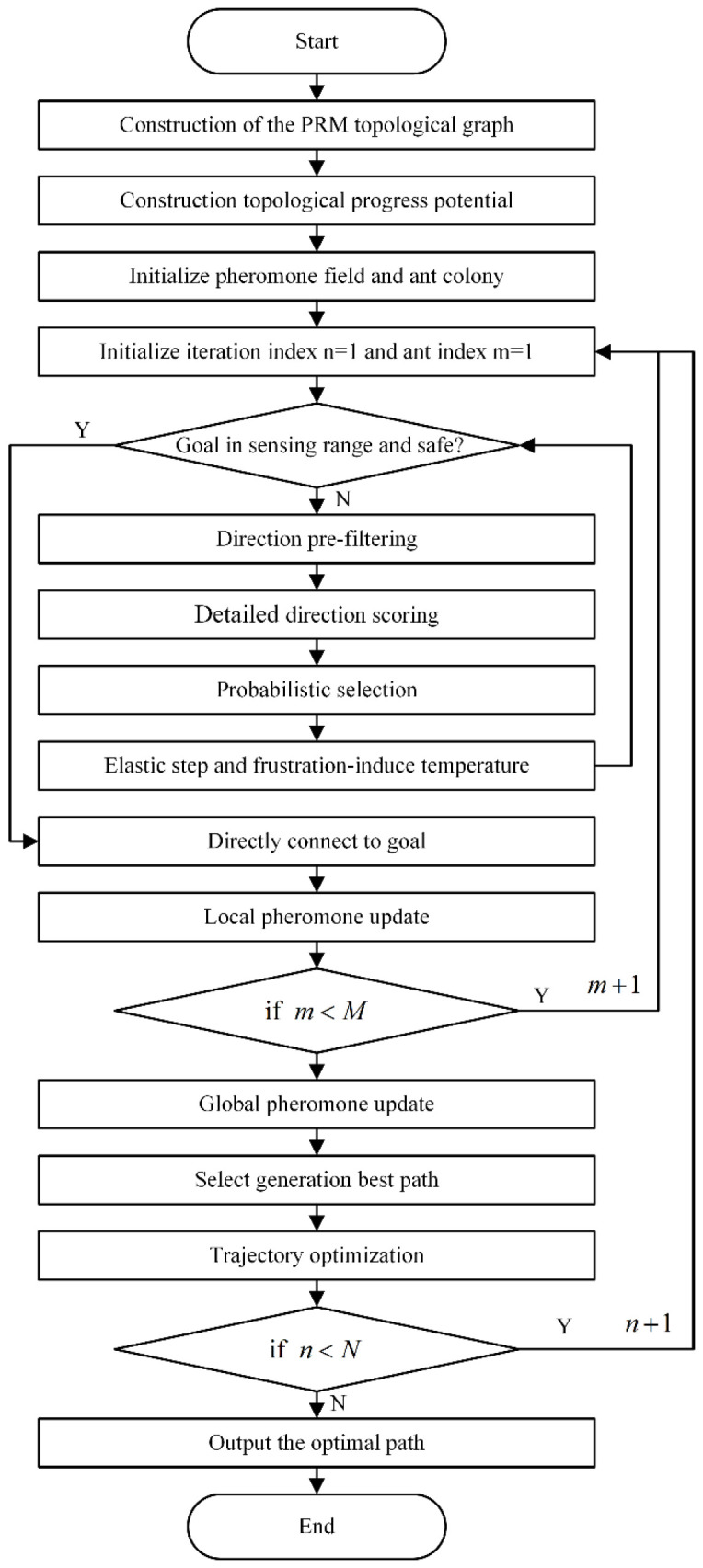 Figure 6
Figure 6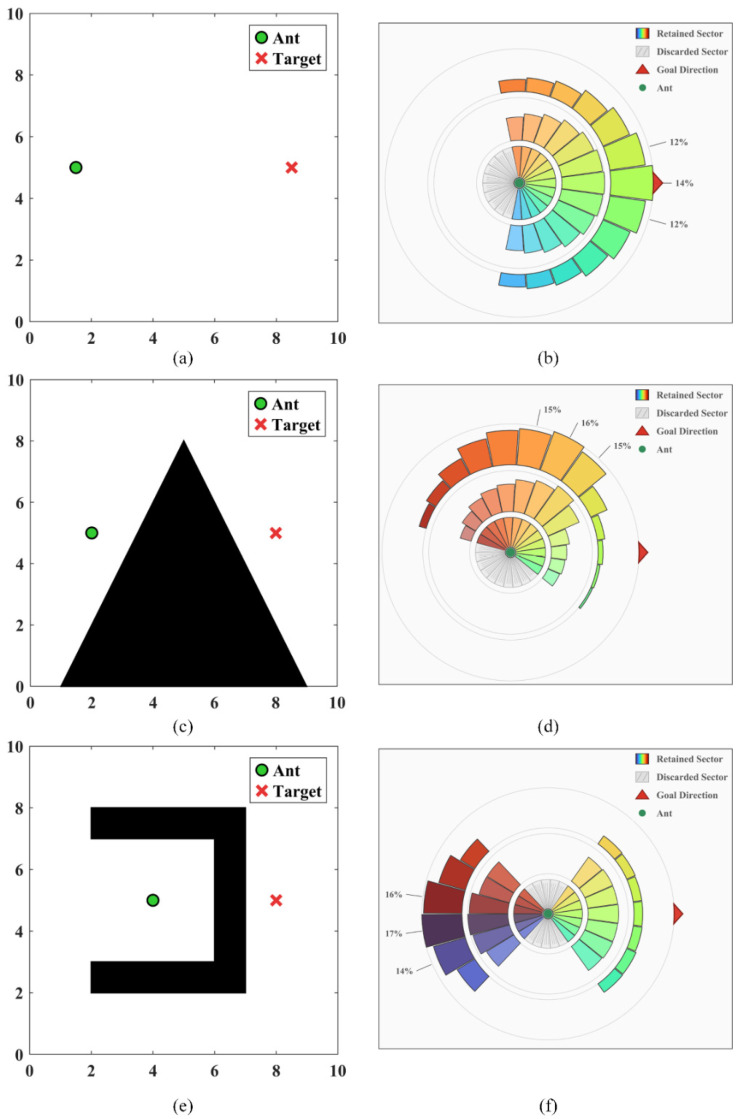 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12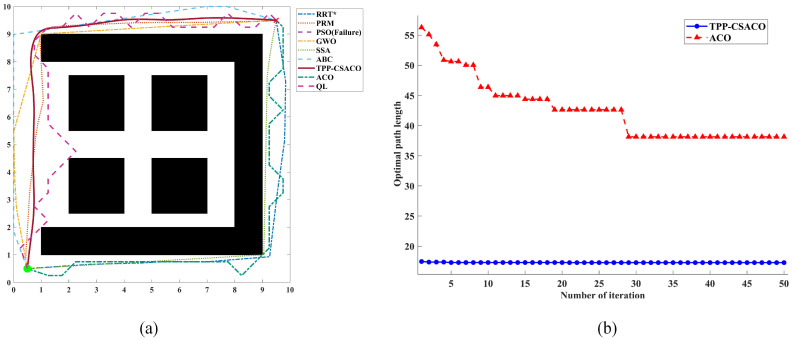 Figure 13
Figure 13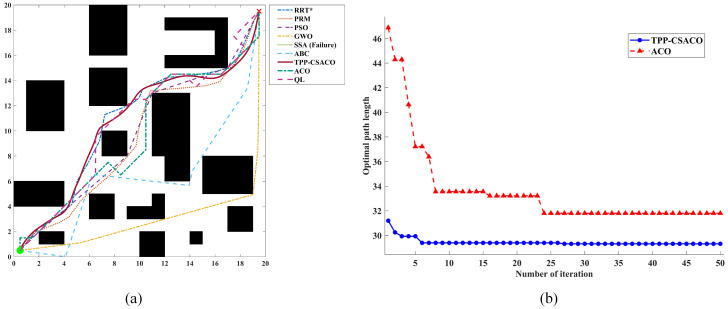 Figure 14
Figure 14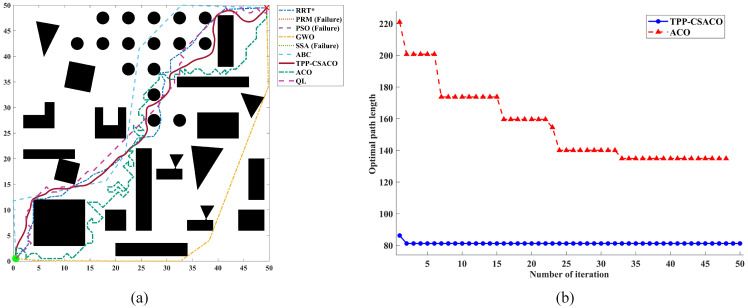 Figure 15
Figure 15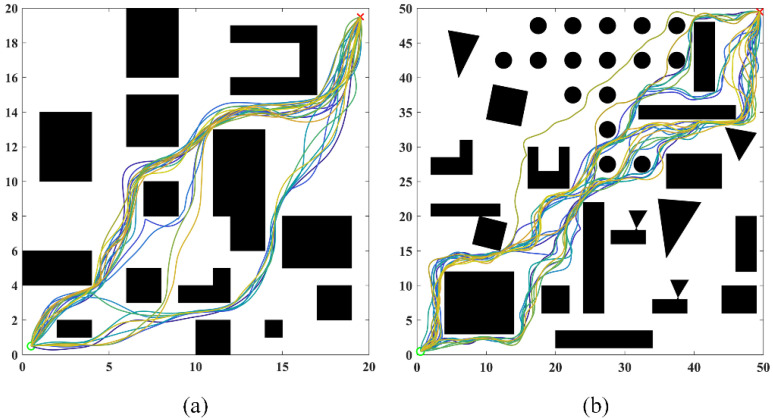 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Slime Mold and Myxomycetes Research · Metaheuristic Optimization Algorithms Research