Obstacle Avoidance Path Planning for Robotic Arms Using a Multi-Strategy Collaborative Bidirectional RRT* Algorithm
Xiangchen Ku, Erzhou Zhu, Sen Li

TL;DR
This paper introduces an improved RRT* algorithm for robotic arms that efficiently plans obstacle-avoiding paths with faster convergence and smoother results.
Contribution
The novel algorithm combines dynamic sampling, bidirectional search, and path smoothing to significantly enhance path planning performance.
Findings
The improved algorithm reduces planning time by 58–90% compared to existing methods.
It decreases path nodes by 31–91% and shortens path length by 8–20%.
The algorithm demonstrates superior performance in both simple and complex 3D environments.
Abstract
In response to issues such as insufficient bias in random sampling, low convergence efficiency, inadequate path search efficiency, and lack of path smoothness encountered by the traditional RRT* algorithm during path planning, an improved algorithm is proposed. First, a dynamic ellipsoidal sampling strategy is introduced, which accelerates the exploration of the path space by adaptively adjusting the sampling region. Additionally, a bidirectional RRT* algorithm is employed, establishing two alternately growing search trees to perform bidirectional search, thereby effectively enhancing the convergence speed of the algorithm. Second, a dynamic goal-biased strategy is adopted, which greedily guides the random tree to grow rapidly toward the goal point, thereby improving planning efficiency. A heuristic search scheme is integrated with the RRT* algorithm to further increase convergence…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4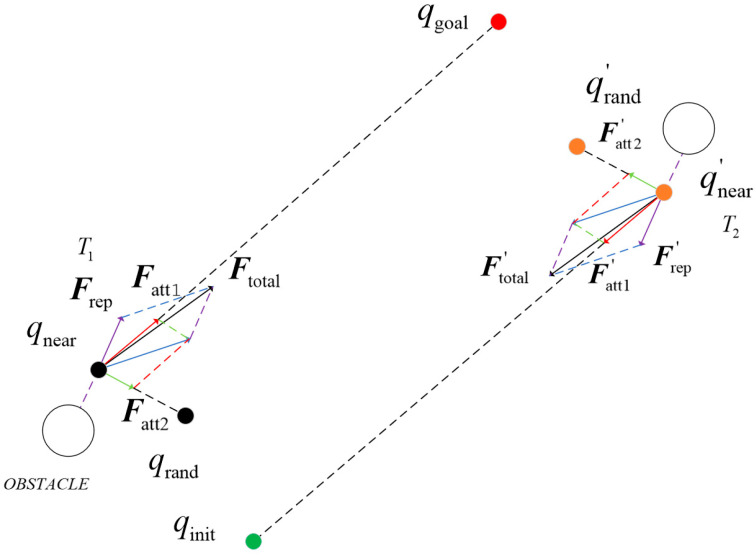 Figure 5
Figure 5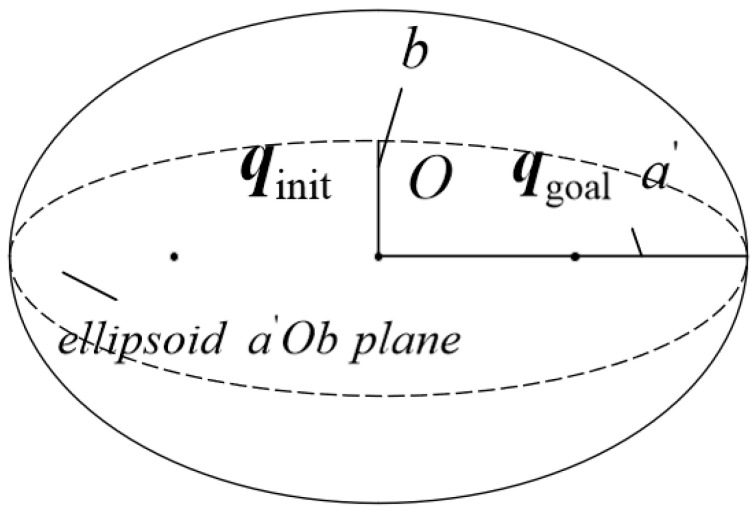 Figure 6
Figure 6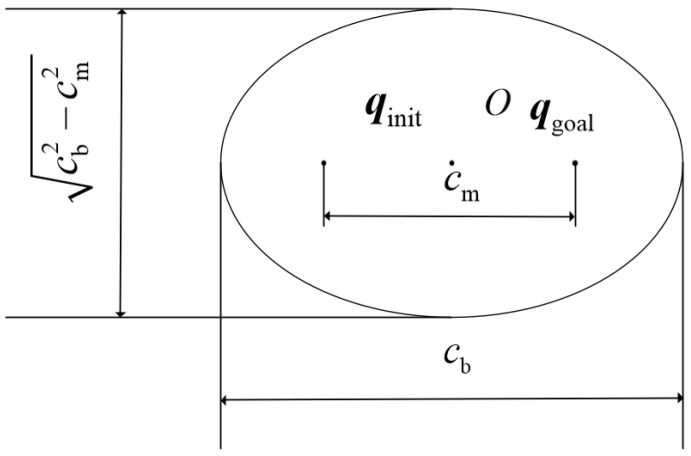 Figure 7
Figure 7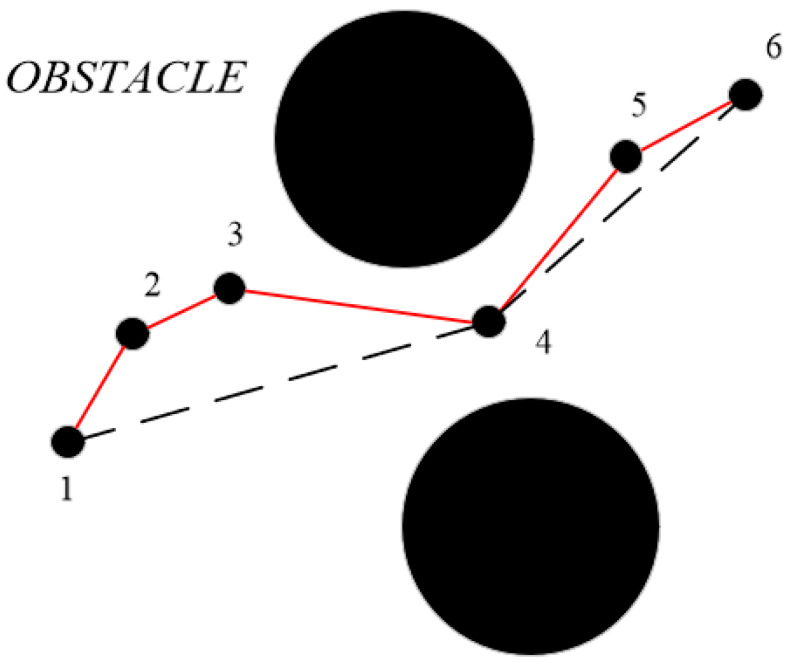 Figure 8
Figure 8 Figure 9
Figure 9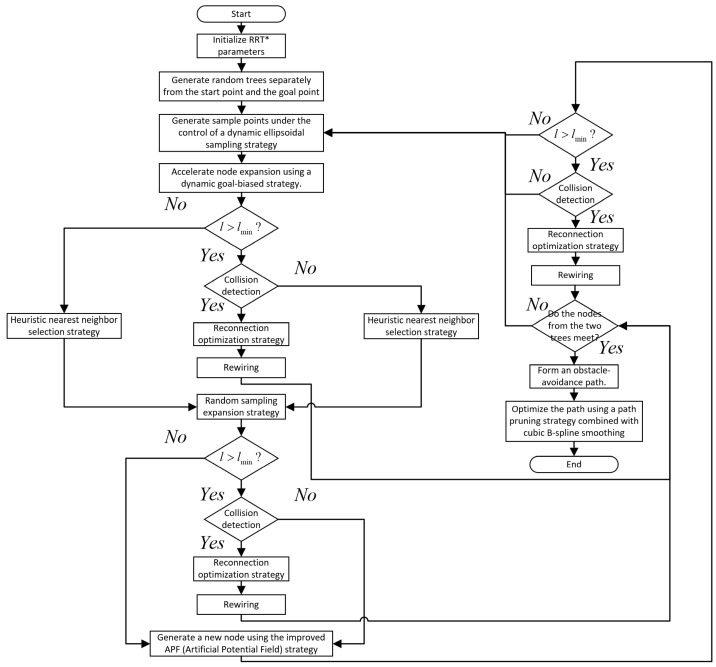 Figure 10
Figure 10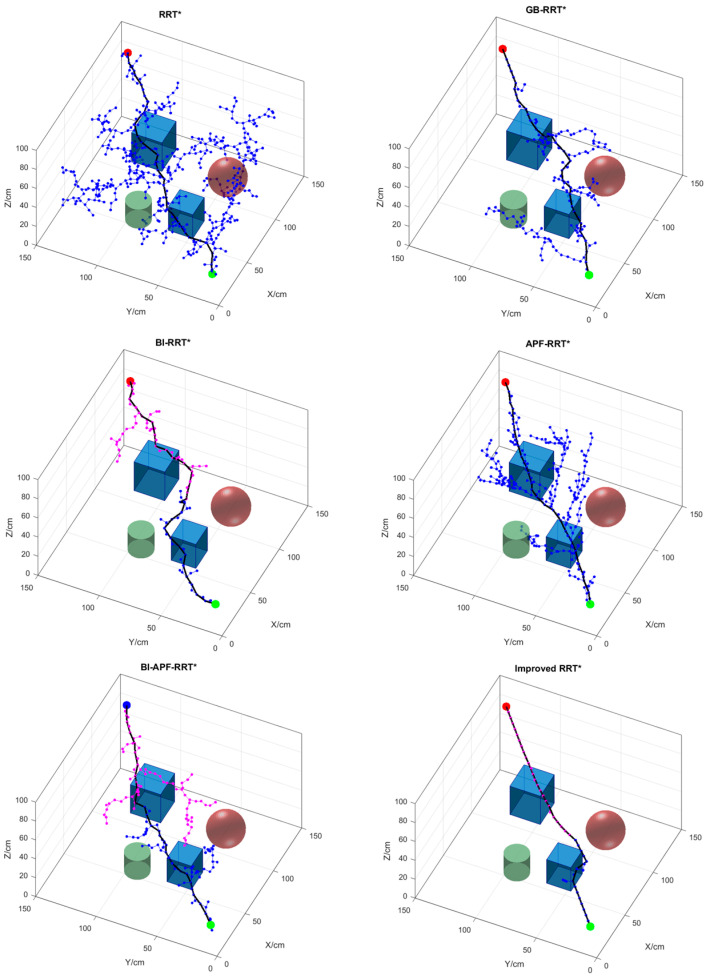 Figure 11
Figure 11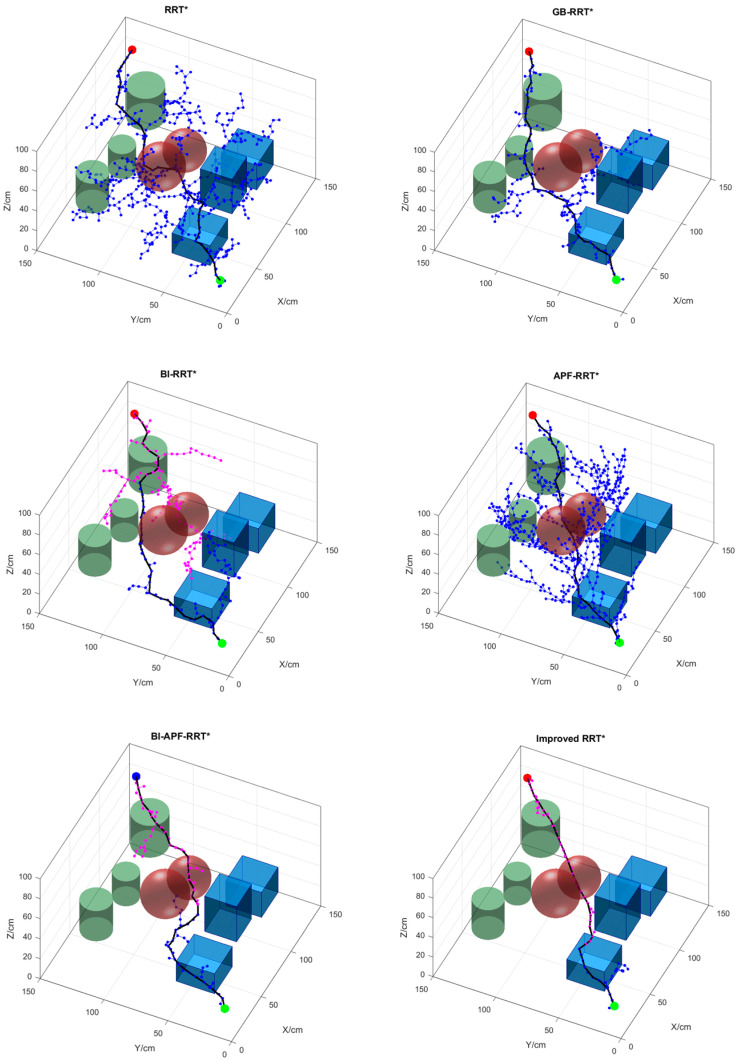 Figure 12
Figure 12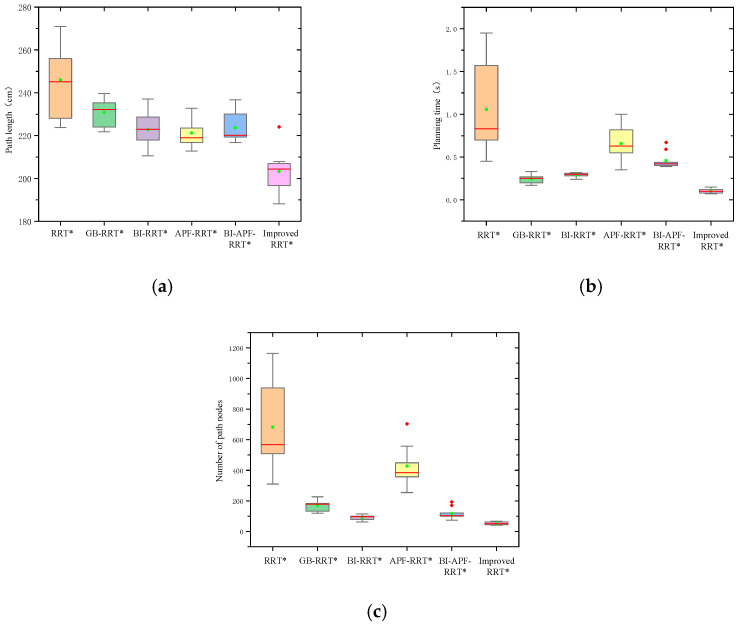 Figure 13
Figure 13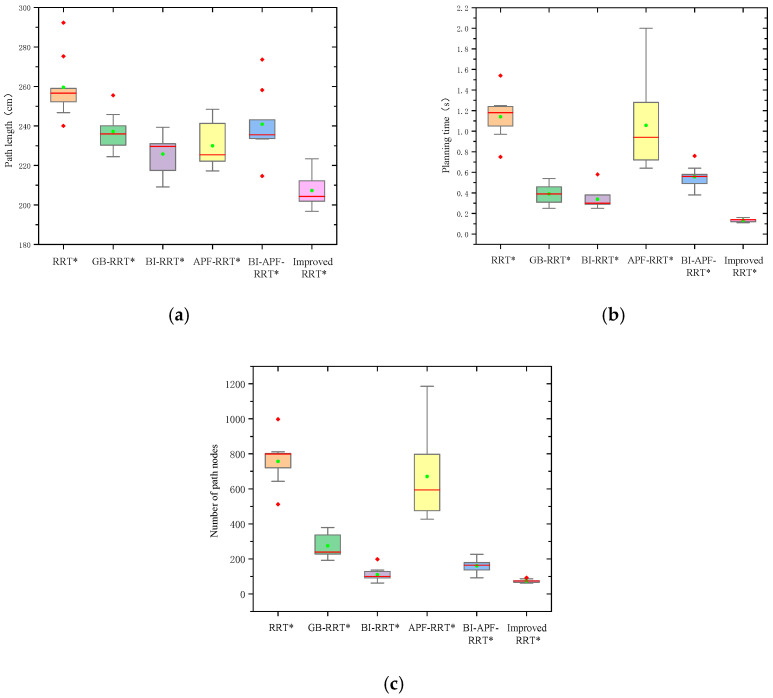 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Control and Dynamics of Mobile Robots · Robotic Locomotion and Control