Modified Extended Kalman Filter and Long Short-Term Memory-Based Framework for Reliable Stride-Length Estimation Using Inertial Sensors
Qian Mao, Fan Yang

TL;DR
This paper introduces a new framework combining sensor preprocessing and machine learning to improve the accuracy of estimating stride length during walking.
Contribution
The novel contribution is integrating a modified Kalman filter with LSTM networks to enhance stride-length estimation from noisy inertial sensor data.
Findings
The framework reduced stride-length estimation error from 29.78% to 7.77%.
LSTM models achieved a Mean Absolute Error of 0.0376 and an R2 score of 0.7066.
The method proved robust for wearable gait analysis in clinical and health monitoring contexts.
Abstract
Gait analysis plays a critical role in assessing mobility and identifying risks such as frailty and falls, where accurate spatiotemporal measurements are essential for early intervention, particularly in aging populations and clinical screening contexts. However, robust gait characterization remains challenging due to noise contamination and variability in sensor-based signals. To address these limitations, this study presents a stride-length estimation framework formulated as a modified processing-and-estimation pipeline integrated with Long Short-Term Memory (LSTM) networks. The pipeline includes wavelet-based denoising and cubic-spline interpolation as front-end preprocessing, followed by a Kalman-filtering stage with dynamic gain regulation guided by acceleration zero-crossing events to mitigate transient errors around abrupt turning points. Experimental data were collected from…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
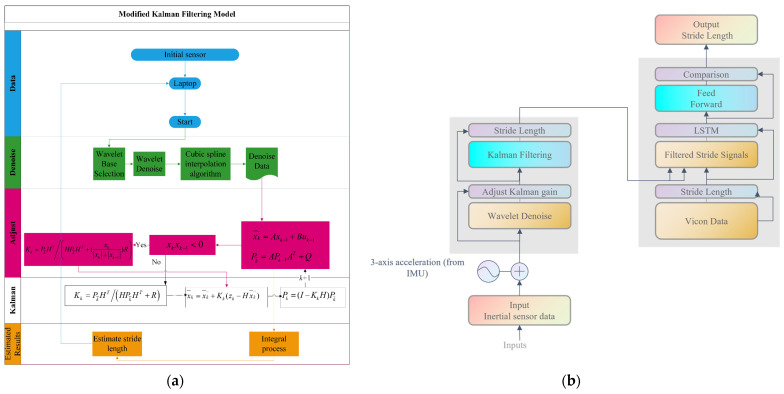 Figure 1
Figure 1 Figure 2
Figure 2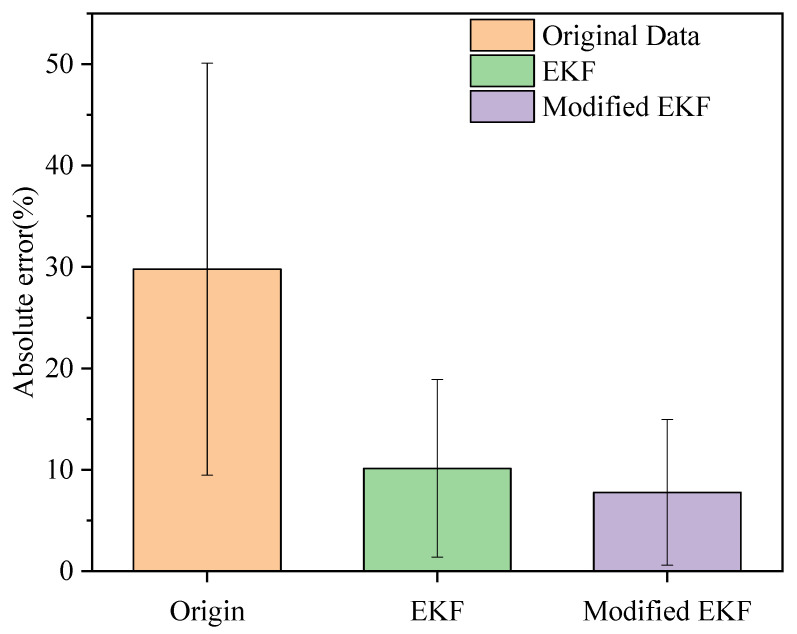 Figure 3
Figure 3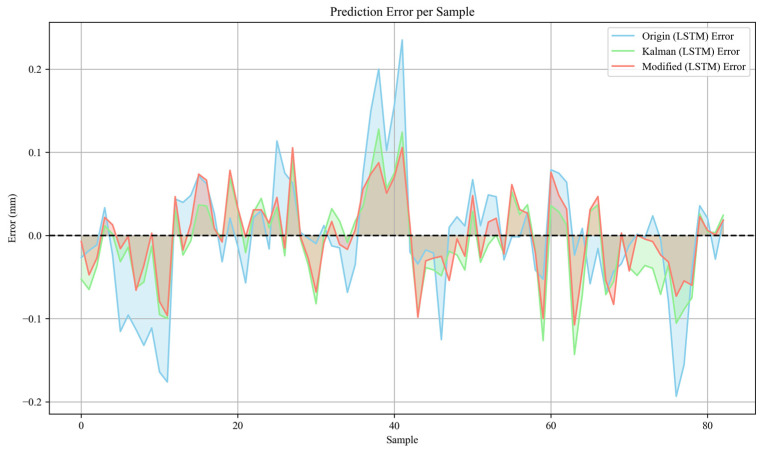 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsBalance, Gait, and Falls Prevention · Context-Aware Activity Recognition Systems · Gait Recognition and Analysis