Binding Point Recognition and Localization and Manipulator Binding Path Planning for a Rebar Binding Robot
Linjie Dong, Renfei Zhang, Zikang Shao, Ziqiu Bian, Xingsong Wang

TL;DR
This paper introduces a rebar binding robot system that improves binding-point recognition and path planning for efficient and accurate automated rebar binding in construction.
Contribution
The paper proposes an integrated method combining a lightweight vision model and an improved RRT-Connect algorithm for rebar binding tasks.
Findings
The YOLOv8n-pose-Binding model improves keypoint detection accuracy and real-time performance with reduced computational complexity.
The improved RRT-Connect algorithm shows better path planning efficiency and path quality in rebar mesh environments.
Simulation and experiments confirm stable improvements in recognition accuracy and inference efficiency over baseline models.
Abstract
Rebar binding is a labor-intensive and low-efficiency process in the production of reinforced concrete prefabricated components, in which consistent binding quality is difficult to guarantee. To address the engineering challenges faced by rebar binding robots in complex construction environments—particularly in terms of binding-point recognition accuracy, real-time performance, and manipulator path planning efficiency—this paper presents an integrated method for binding-point recognition, localization, and binding path planning tailored to rebar binding tasks. First, based on the YOLOv8n-pose architecture, a lightweight rebar binding-point recognition and localization model, termed YOLOv8n-pose-Binding, is developed by introducing multi-scale Ghost convolution structures and an adaptive threshold focal loss. The proposed model improves keypoint detection accuracy and real-time…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
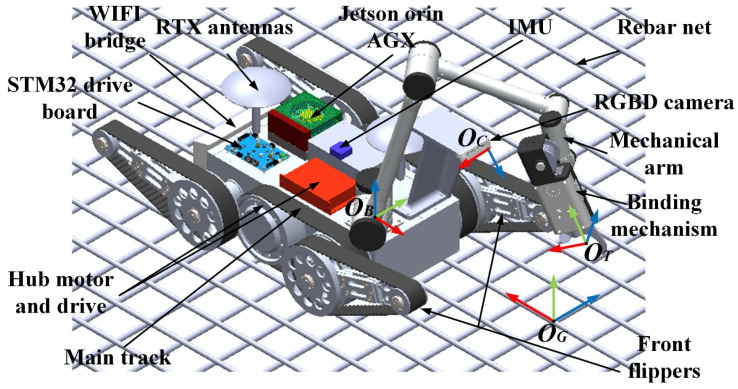 Figure 1
Figure 1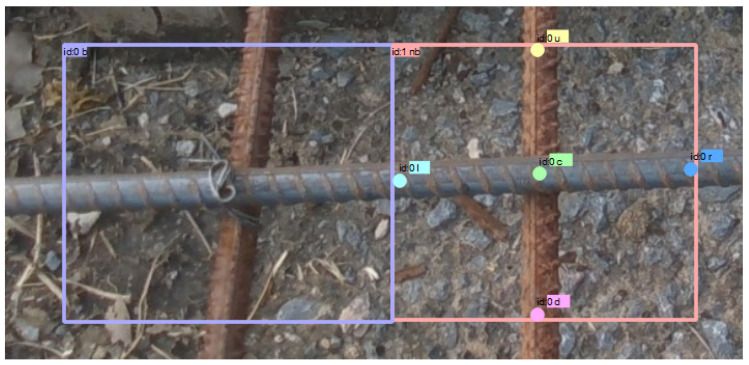 Figure 2
Figure 2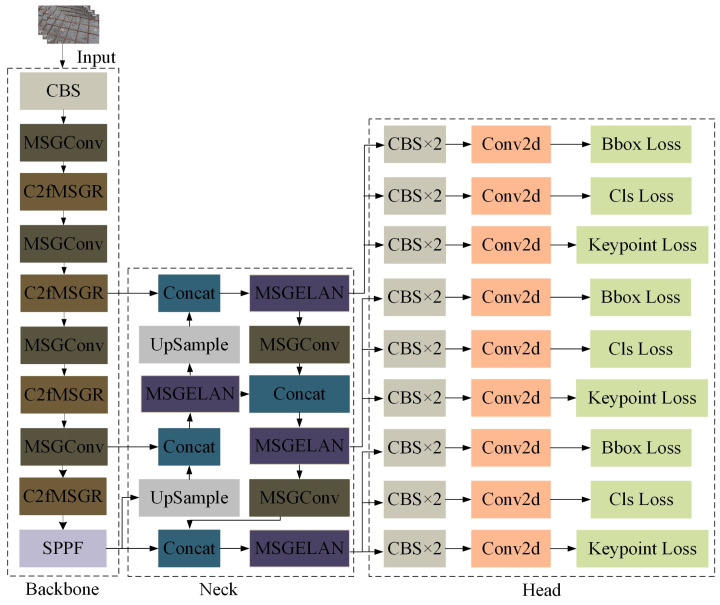 Figure 3
Figure 3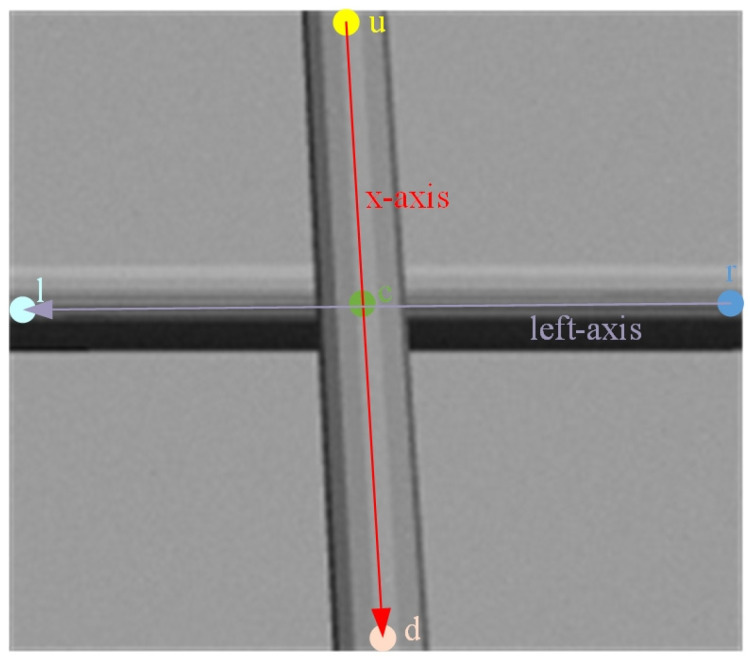 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8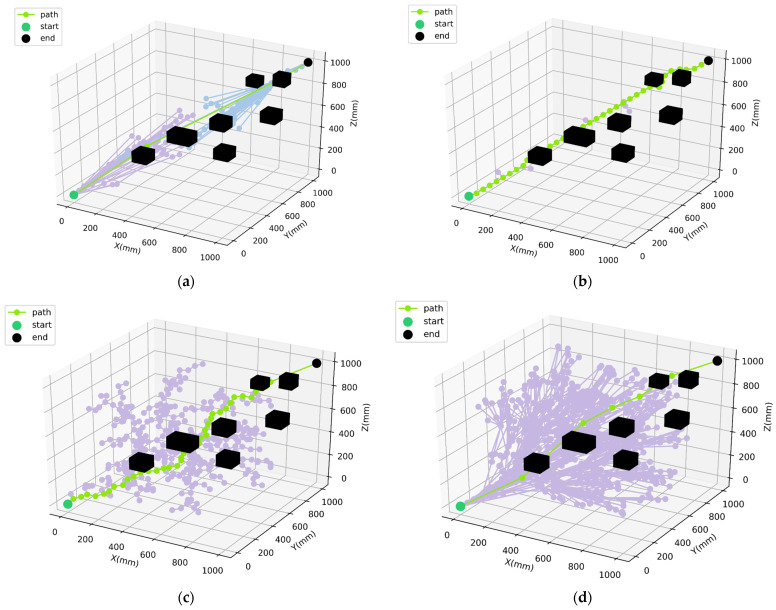 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Innovations in Concrete and Construction Materials · Robotic Path Planning Algorithms