Closing Sim2Real Gaps: A Versatile Development and Validation Platform for Autonomous Driving Stacks
J. Felipe Arango, Rodrigo Gutiérrez-Moreno, Pedro A. Revenga, Ángel Llamazares, Elena López-Guillén, Luis M. Bergasa

TL;DR
This paper introduces a methodology and platform to bridge the gaps between simulated and real-world performance in autonomous driving systems.
Contribution
A structured methodology and open-source platform for closing Sim2Real gaps in autonomous driving stacks.
Findings
Experiments showed convergence between simulated and real behavior in an urban scenario.
The proposed metric suite effectively aligns reality and evaluates ego-vehicle performance.
The platform enables scalable and accessible Sim2Real research for autonomous navigation.
Abstract
The successful transfer of autonomous driving stacks (ADS) from simulation to the real world faces two main challenges: the Reality Gap (RG)—mismatches between simulated and real behaviors—and the Performance Gap (PG)—differences between expected and achieved performance across domains. We propose a Methodology for Closing Reality and Performance Gaps (MCRPG), a structured and iterative approach that jointly reduces RG and PG through parameter tuning, cross-domain metrics, and staged validation. MCRPG comprises three stages—Digital Twin, Parallel Execution, and Real-World—to progressively align ADS behavior and performance. To ground and validate the method, we present an open-source, cost-effective Development and Validation Platform (DVP) that integrates an ROS-based modular ADS with the CARLA simulator and a custom autonomous electric vehicle. We also introduce a two-level metric…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
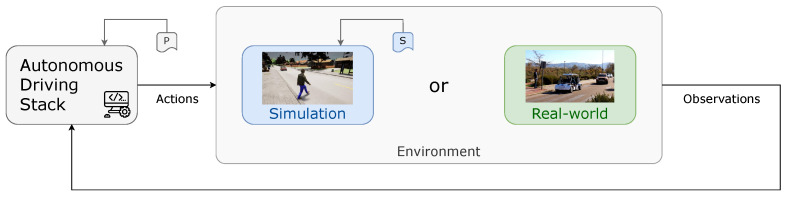 Figure 1
Figure 1 Figure 2
Figure 2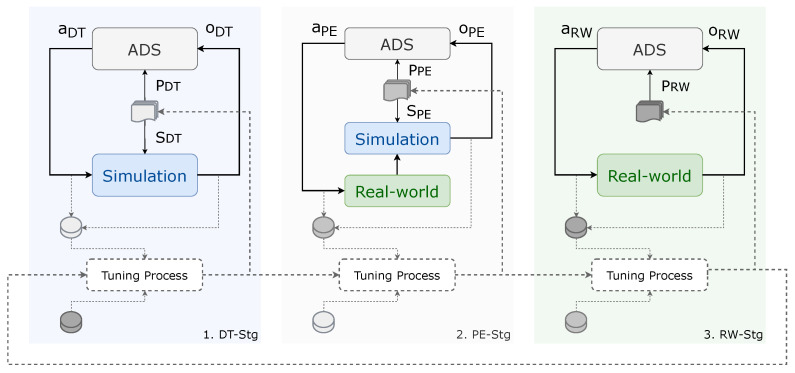 Figure 3
Figure 3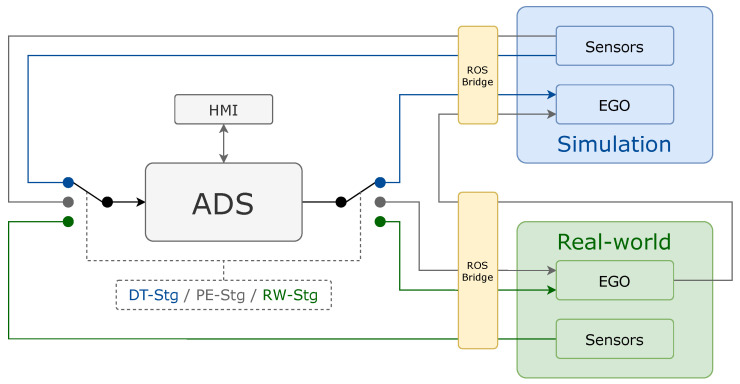 Figure 4
Figure 4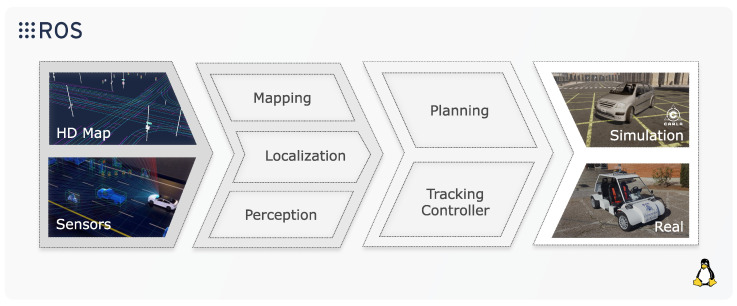 Figure 5
Figure 5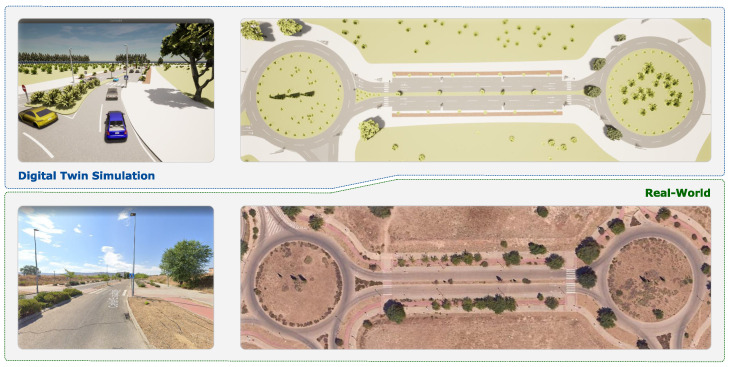 Figure 6
Figure 6 Figure 7
Figure 7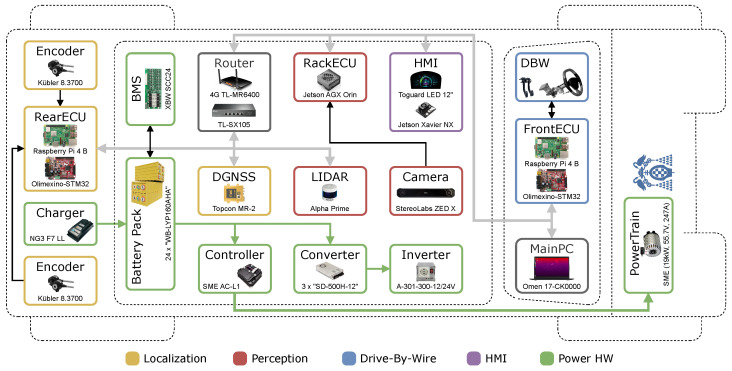 Figure 8
Figure 8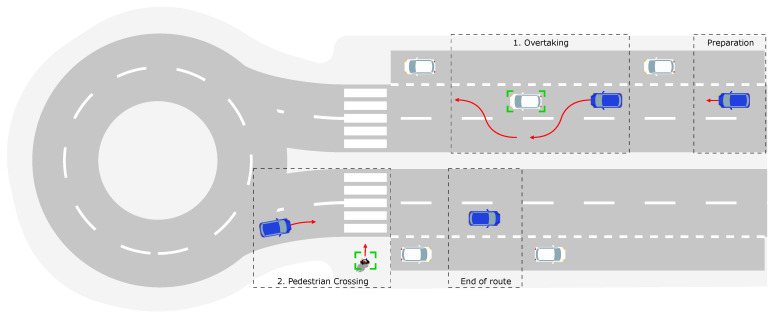 Figure 9
Figure 9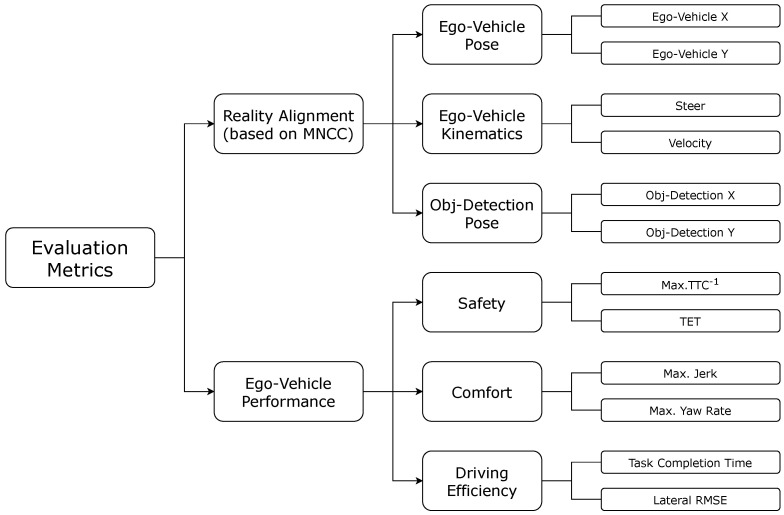 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAutonomous Vehicle Technology and Safety · Human-Automation Interaction and Safety · Robotics and Sensor-Based Localization