Autoregressive and Residual Index Convolution Model for Point Cloud Geometry Compression
Gerald Baulig, Jiun-In Guo

TL;DR
This paper introduces a new point cloud compression model that uses autoregressive and residual index convolution techniques to improve compression performance and reduce resource usage.
Contribution
The novel contribution is the integration of autoregressive grouping and a distiller layer in a point cloud compression model.
Findings
The proposed model outperforms recent deep learning-based compression models in performance.
The approach reduces time and memory consumption compared to previous voxel convolution and attention-based methods.
The model demonstrates effectiveness on three datasets using autoregressive and residual techniques.
Abstract
This study introduces a hybrid point cloud compression method that transfers from octree-nodes to voxel occupancy estimation to find its lower-bound bitrate by using a Binary Arithmetic Range Coder. In previous attempts, we demonstrated that our entropy compression model based on index convolution achieves promising performance while maintaining low complexity. However, our previous model lacks an autoregressive approach, which is apparently indispensable to compete with the current state-of-the-art of compression performance. Therefore, we adapt an autoregressive grouping method that iteratively populates, explores, and estimates the occupancy of 1-bit voxel candidates in a more discrete fashion. Furthermore, we refactored our backbone architecture by adding a distiller layer on each convolution, forcing every hidden feature to contribute to the final output. Our proposed model…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
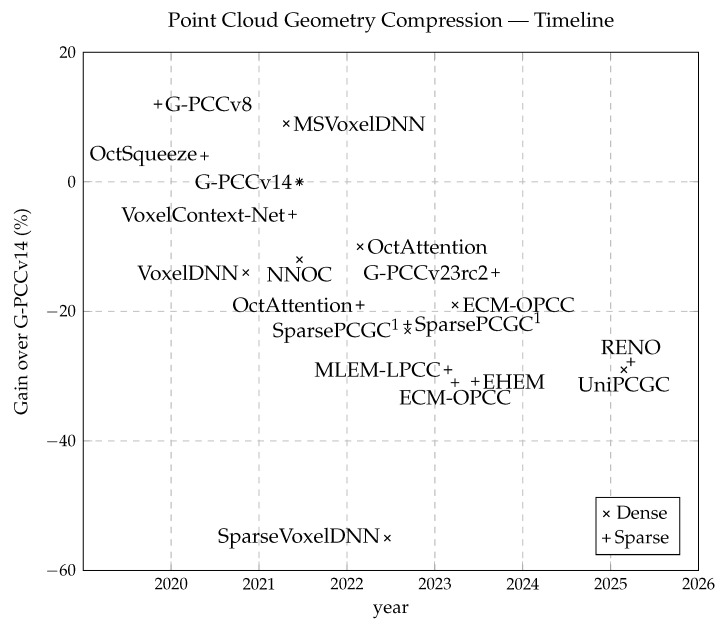 Figure 1
Figure 1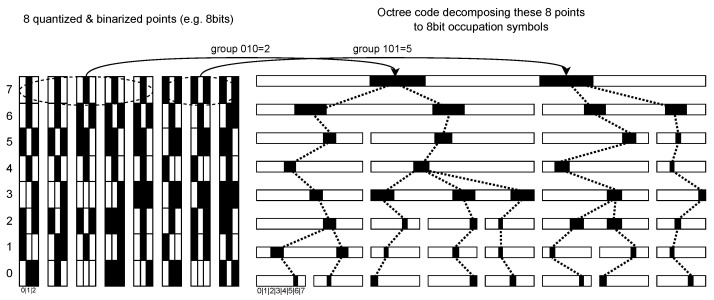 Figure 2
Figure 2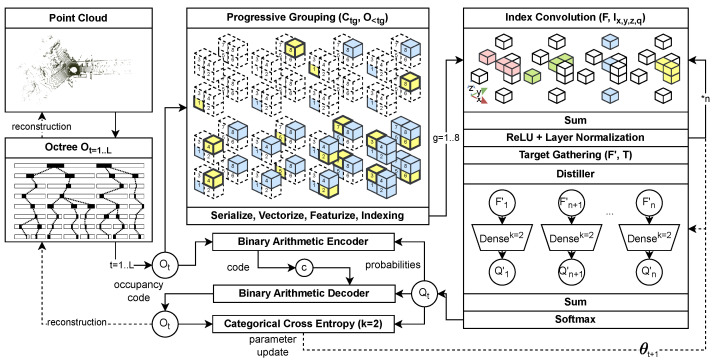 Figure 3
Figure 3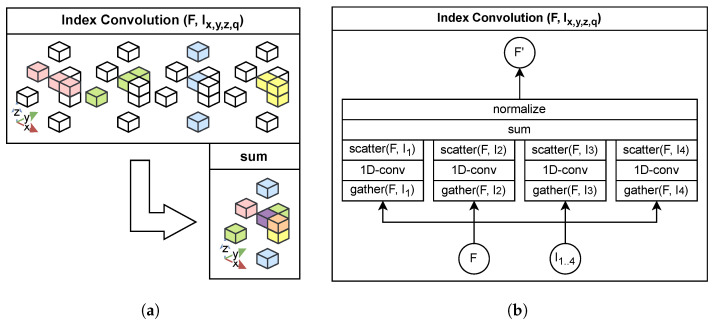 Figure 4
Figure 4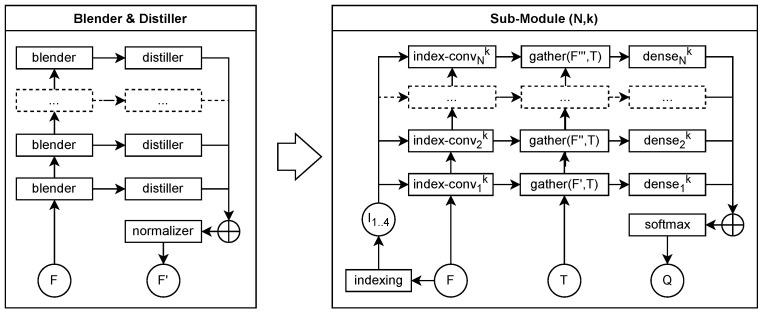 Figure 5
Figure 5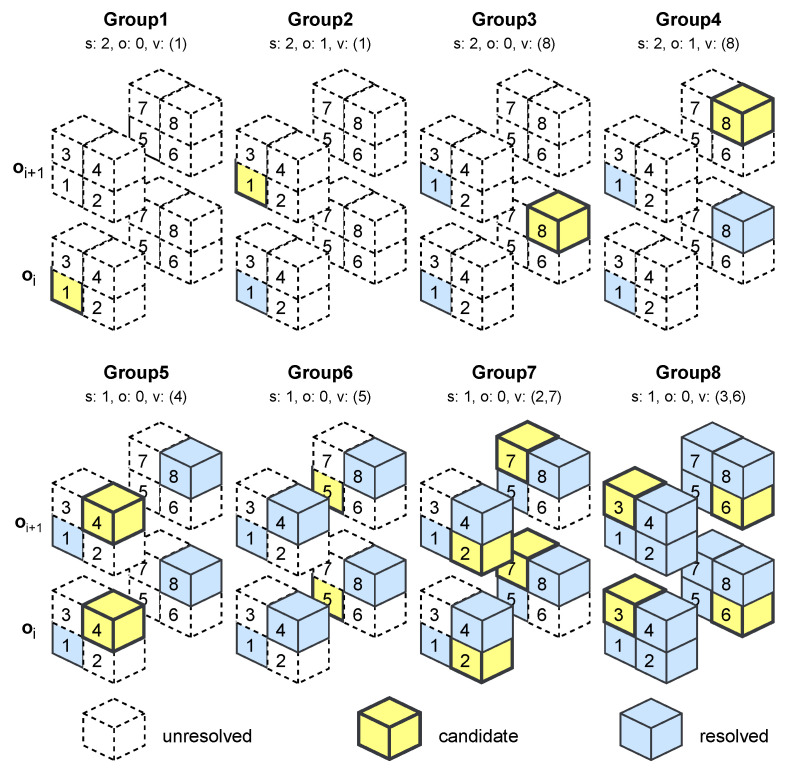 Figure 6
Figure 6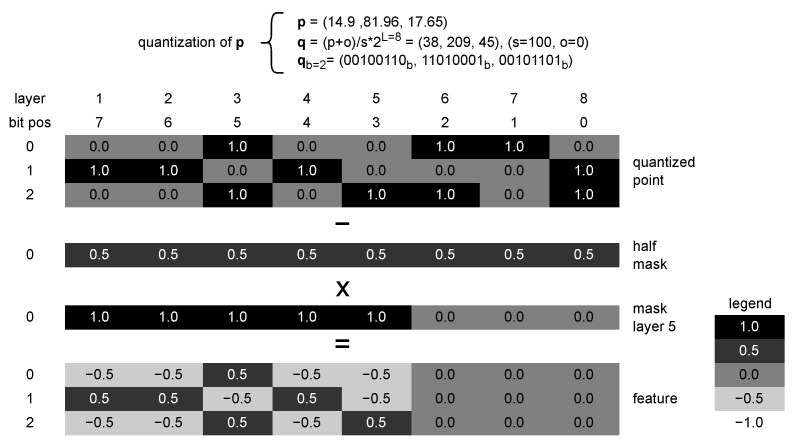 Figure 7
Figure 7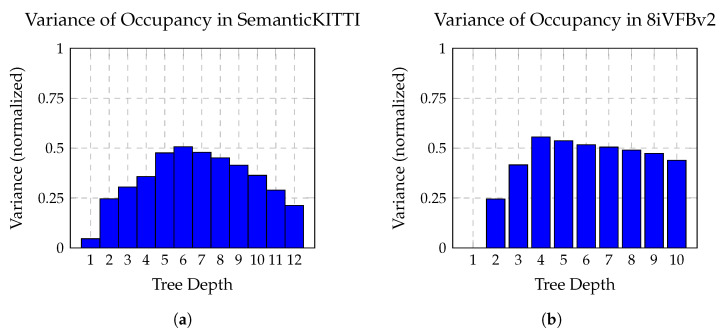 Figure 8
Figure 8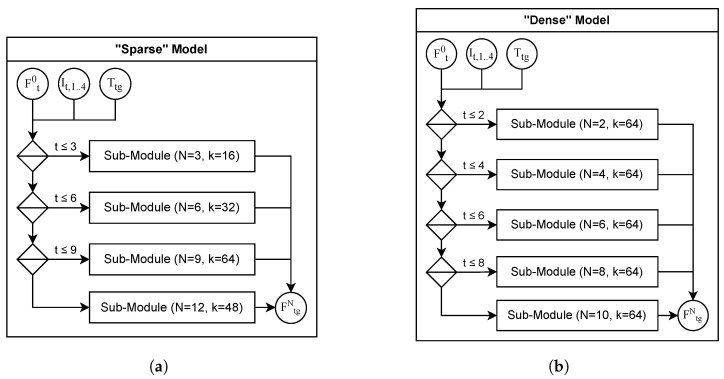 Figure 9
Figure 9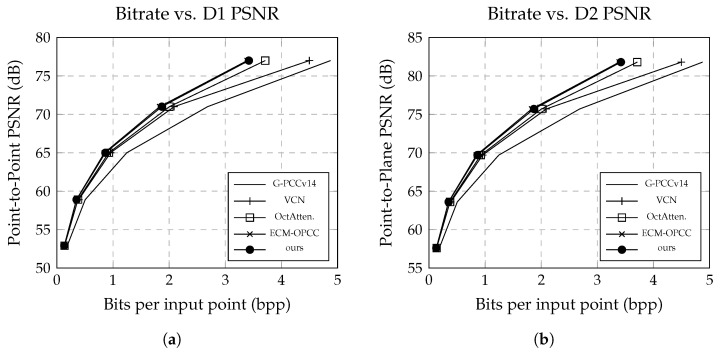 Figure 10
Figure 10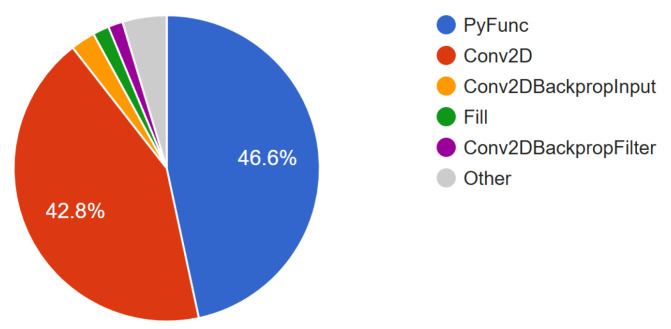 Figure 11
Figure 11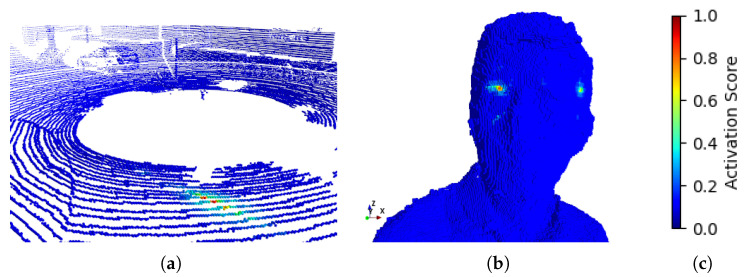 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
Topics3D Shape Modeling and Analysis · Robotics and Sensor-Based Localization · Remote Sensing and LiDAR Applications