Multi-Objective Optimization of Material Removal Characteristics for Robot Polishing of Ti-6Al-4V
Fengjun Chen, Rui Bao, Meiling Du, Mu Cheng, Jiehong Peng

TL;DR
This paper uses a multi-objective optimization algorithm to improve robotic polishing of Ti-6Al-4V by balancing surface quality and material removal rate.
Contribution
A novel application of MOPSO for optimizing robotic polishing parameters in Ti-6Al-4V processing.
Findings
Optimal parameters achieved 0.2197 mm3/s MRR and 0.291 μm Ra with low prediction errors.
A quadratic polynomial model accurately predicted surface roughness based on process parameters.
MOPSO successfully generated Pareto optimal solutions for dual objectives.
Abstract
This study employs a multi-objective particle swarm optimization (MOPSO) algorithm to address the dual-objective challenge in the robotic polishing of Ti-6Al-4V. The aim is to determine optimal parameters that minimize surface roughness while maximizing the material removal rate (MRR), thereby improving both surface quality and processing efficiency. First, a material removal depth model for end-face polishing is established based on Preston’s equation and theoretical analysis, from which the MRR model is derived. Subsequently, orthogonal experiments are conducted to investigate the influence of process parameters and their interactions on surface roughness, followed by the development of a quadratic polynomial roughness prediction model. Analysis of variance (ANOVA) and model validation confirm the model’s reliability. Finally, the MOPSO algorithm is applied to obtain the Pareto…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
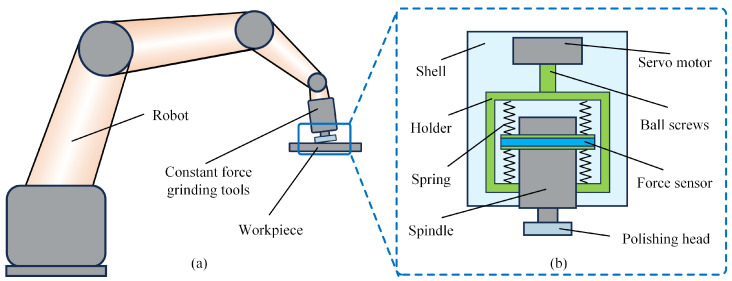 Figure 1
Figure 1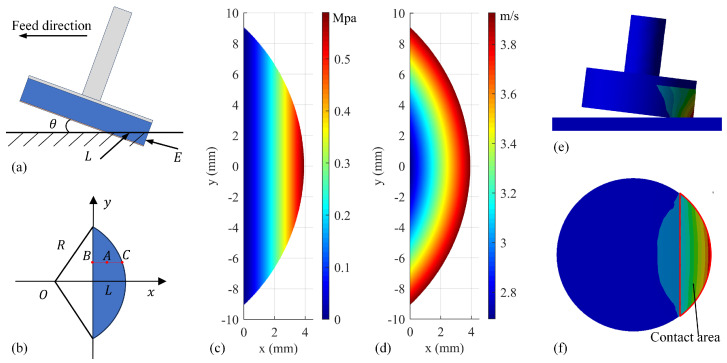 Figure 2
Figure 2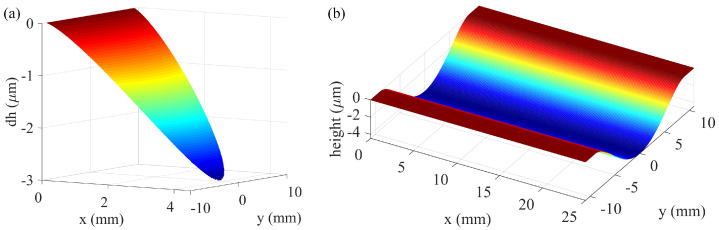 Figure 3
Figure 3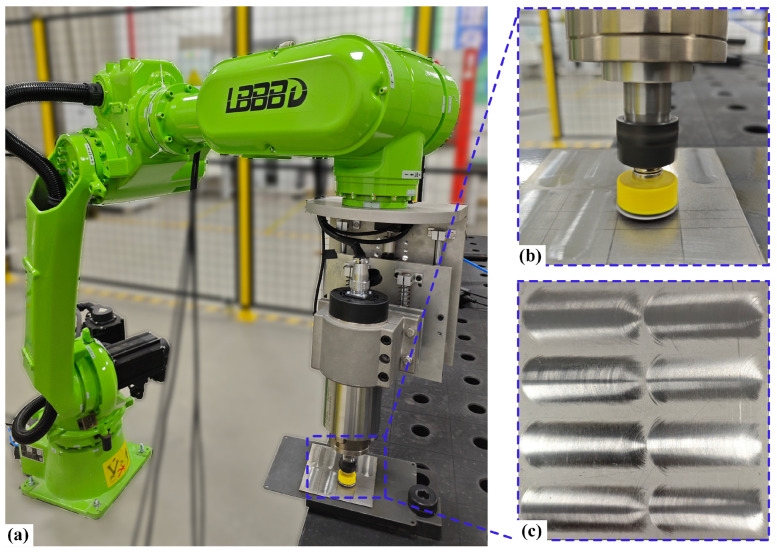 Figure 4
Figure 4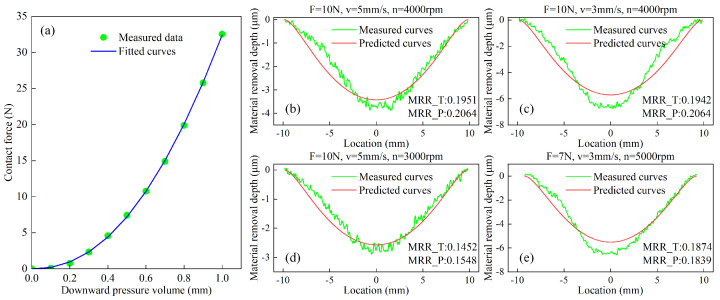 Figure 5
Figure 5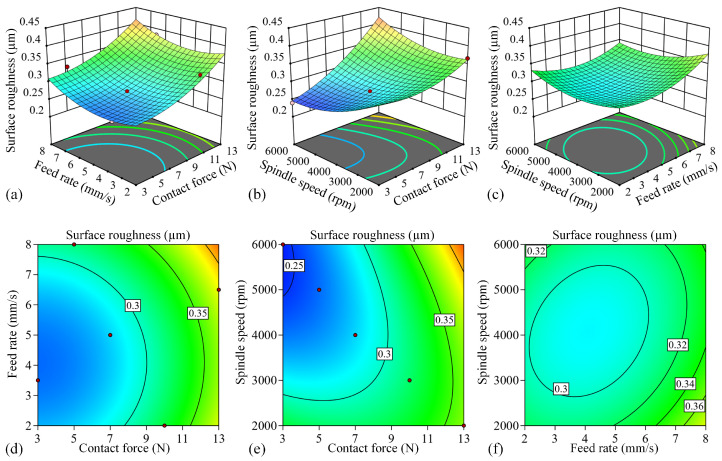 Figure 6
Figure 6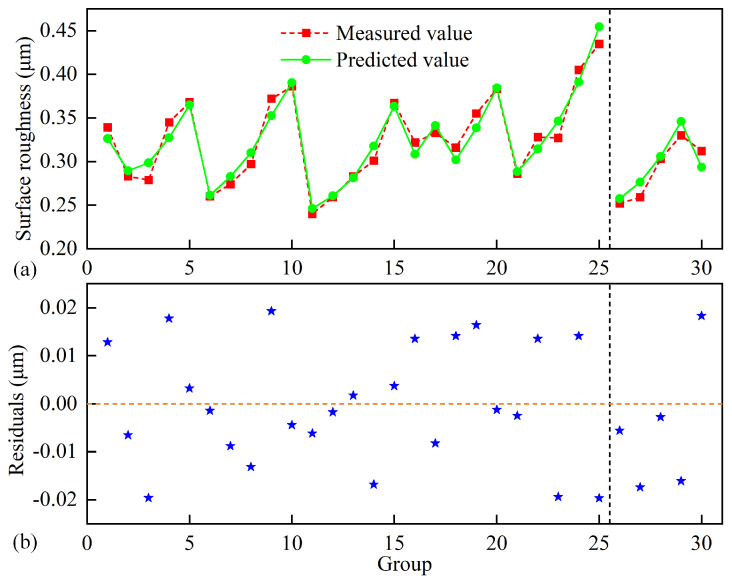 Figure 7
Figure 7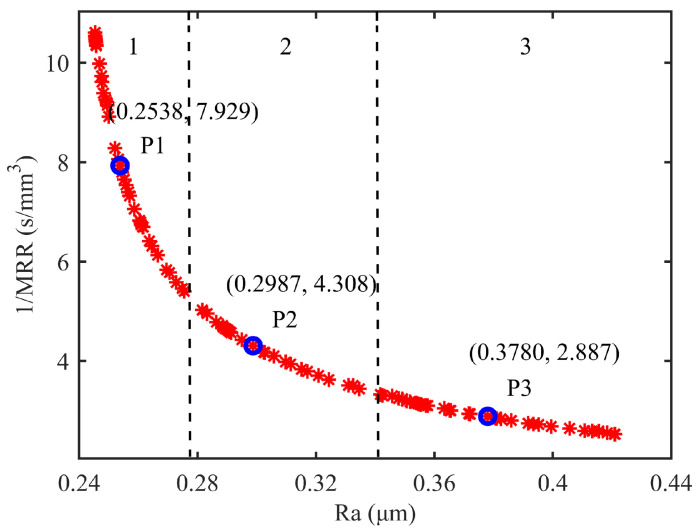 Figure 8
Figure 8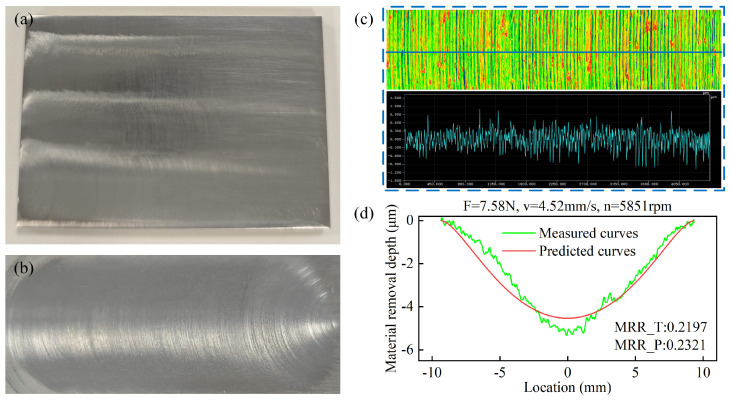 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Surface Polishing Techniques · Advanced machining processes and optimization · Erosion and Abrasive Machining