SREF: Semantics-Refined Feature Extraction for Long-Term Visual Localization
Danfeng Wu, Kaifeng Zhu, Heng Shi, Fenfen Zhou, Minchi Kuang

TL;DR
This paper introduces a new method for visual localization that improves accuracy and robustness in changing environments by using refined semantic features.
Contribution
The novel contribution is a semantics-guided feature extraction framework that enhances stability and suppresses dynamic disturbances.
Findings
The proposed framework achieves state-of-the-art accuracy and robustness in visual localization.
It demonstrates strong performance on Aachen and RobotCar-Seasons benchmarks under various conditions.
The method effectively bridges coarse semantic guidance with fine-grained stability estimation.
Abstract
Accurate and robust visual localization under changing environments remains a fundamental challenge in autonomous driving and mobile robotics. Traditional handcrafted features often degrade under long-term illumination and viewpoint variations, while recent CNN-based methods, although more robust, typically rely on coarse semantic cues and remain vulnerable to dynamic objects. In this paper, we propose a fine-grained semantics-guided feature extraction framework that adaptively selects stable keypoints while suppressing dynamic disturbances. A fine-grained semantic refinement module subdivides coarse semantic categories into stability-homogeneous sub-classes, and a dual-attention mechanism enhances local repeatability and semantic consistency. By integrating physical priors with self-supervised clustering, the proposed framework learns discriminative and reliable feature…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
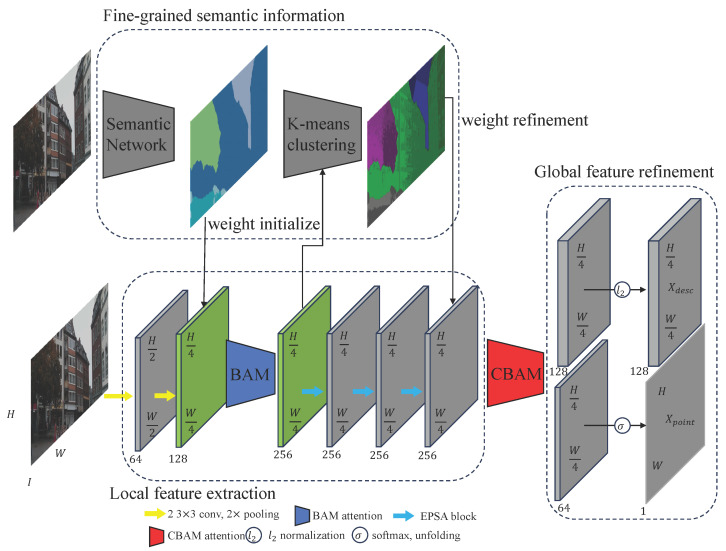 Figure 1
Figure 1 Figure 2
Figure 2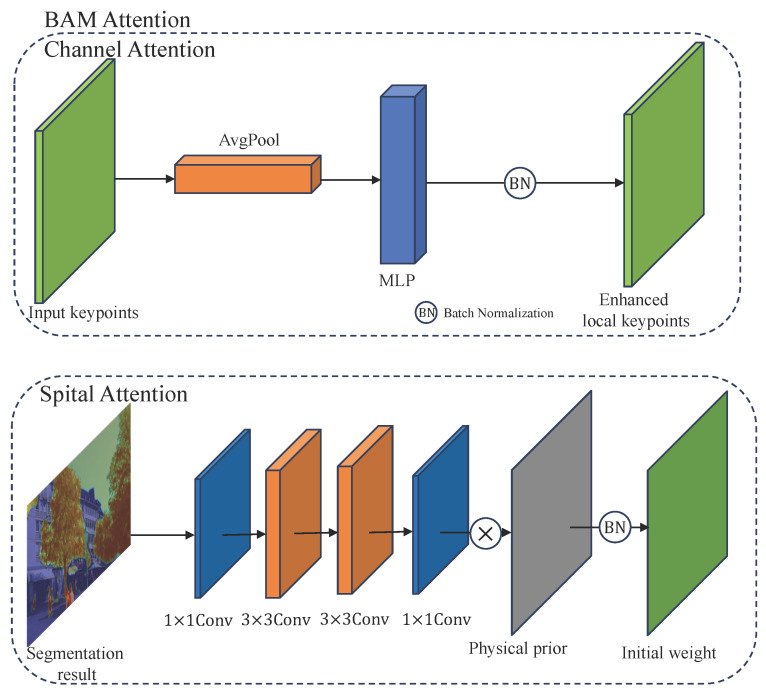 Figure 3
Figure 3 Figure 4
Figure 4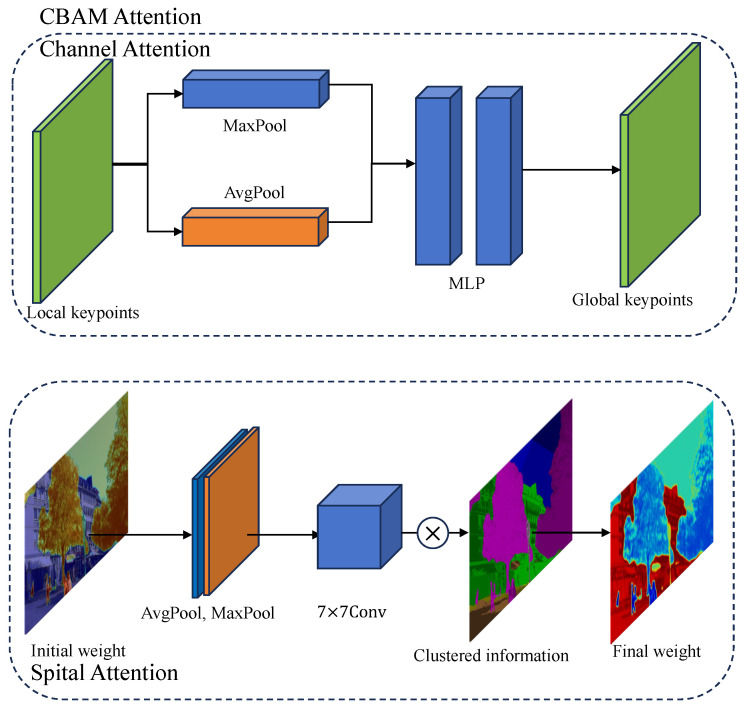 Figure 5
Figure 5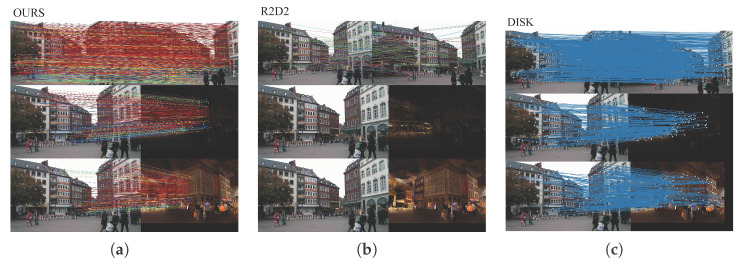 Figure 6
Figure 6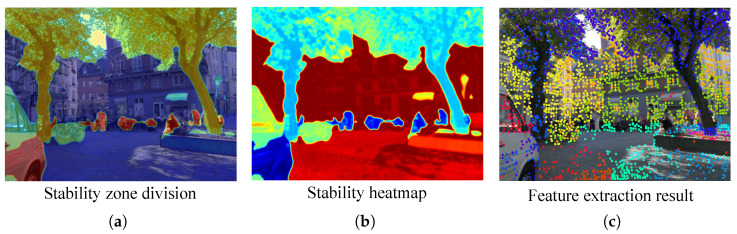 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Advanced Neural Network Applications