3D Road Defect Mapping via Differentiable Neural Rendering and Multi-Frame Semantic Fusion in Bird’s-Eye-View Space
Hongjia Xing, Feng Yang

TL;DR
This paper introduces a new method for creating accurate 3D maps of road defects using video and advanced computer vision techniques.
Contribution
The novel framework combines differentiable neural rendering and multi-frame fusion to enable precise 3D road defect mapping.
Findings
The framework reduces detection errors by 33.7% using semantic filtering.
Multi-frame fusion improves accuracy in handling occlusions and motion blur.
The method outperforms single-frame 2D approaches in 3D defect mapping.
Abstract
Road defect detection is essential for traffic safety and infrastructure maintenance. Excising automated methods based on 2D image analysis lack spatial context and cannot provide accurate 3D localization required for maintenance planning. We propose a novel framework for road defect mapping from monocular video sequences by integrating differentiable Bird’s-Eye-View (BEV) mesh representation, semantic filtering, and multi-frame temporal fusion. Our differentiable mesh-based BEV representation enables efficient scene reconstruction from sparse observations through MLP-based optimization. The semantic filtering strategy leverages road surface segmentation to eliminate off-road false positives, reducing detection errors by 33.7%. Multi-frame fusion with ray-casting projection and exponential moving average update accumulates defect observations across frames while maintaining 3D geometric…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
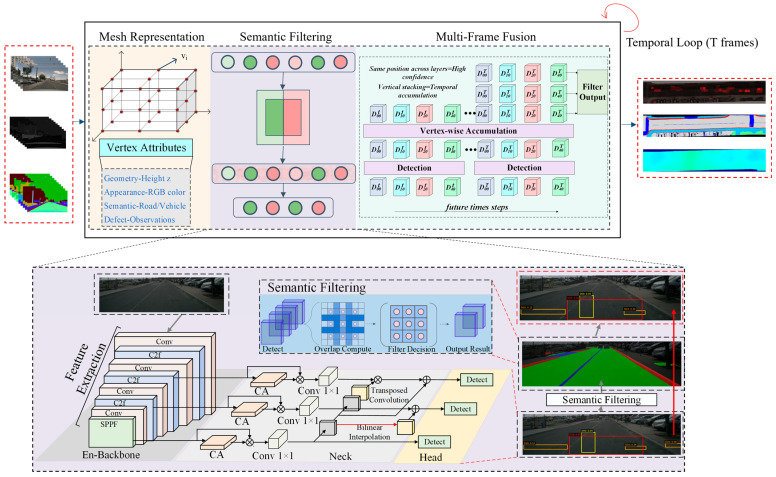 Figure 1
Figure 1 Figure 2
Figure 2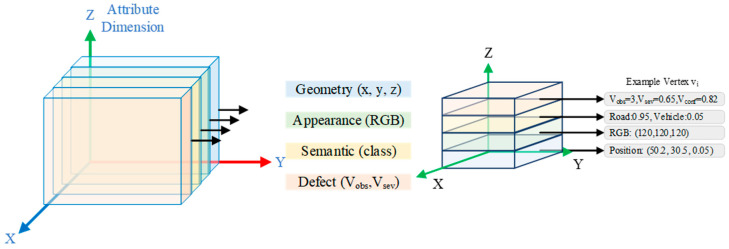 Figure 3
Figure 3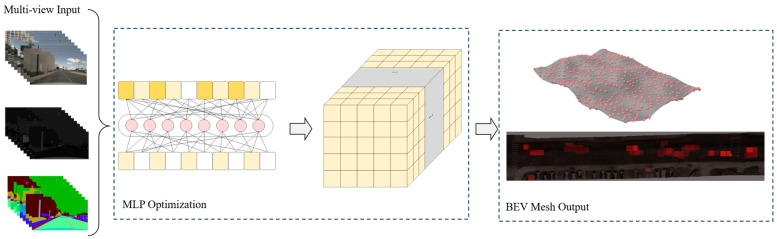 Figure 4
Figure 4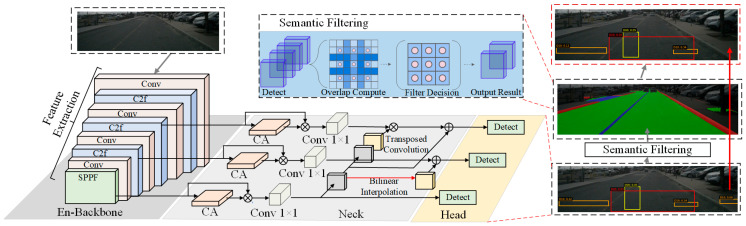 Figure 5
Figure 5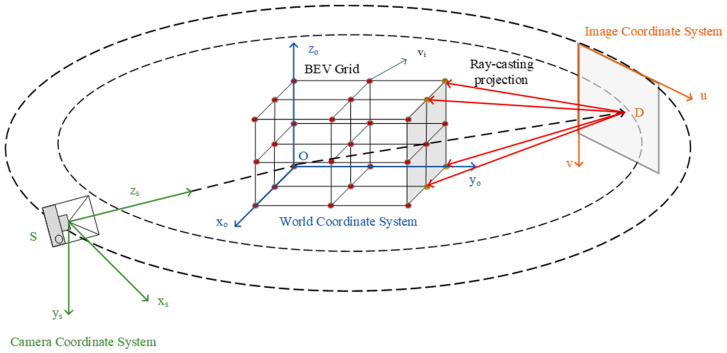 Figure 6
Figure 6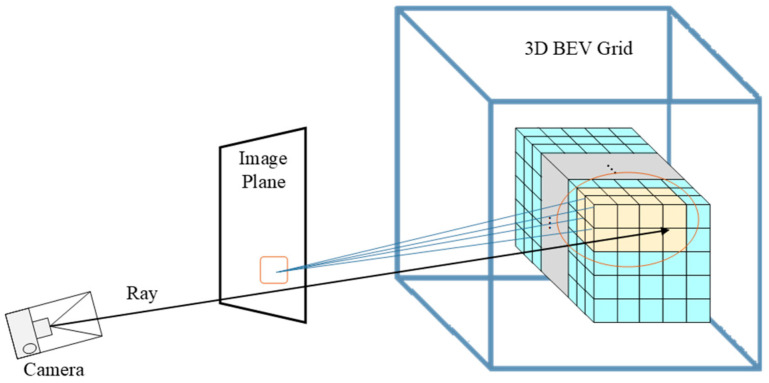 Figure 7
Figure 7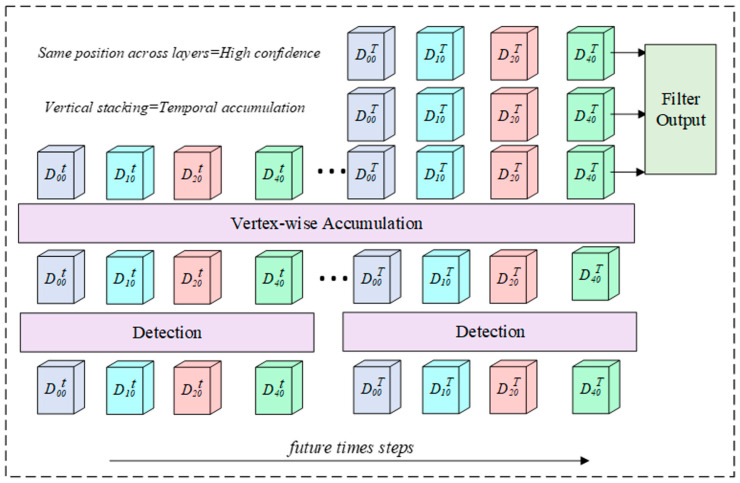 Figure 8
Figure 8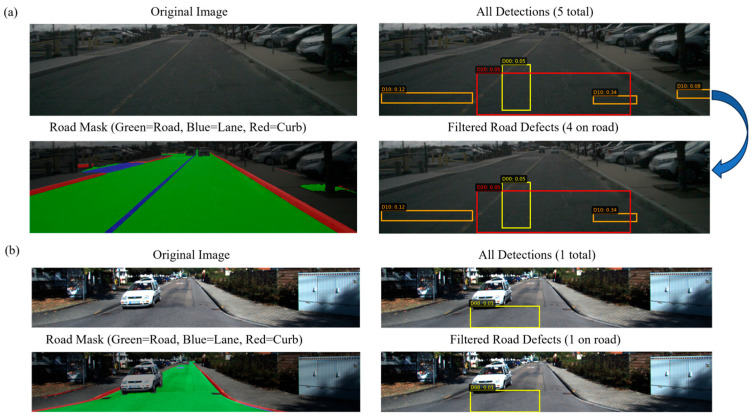 Figure 9
Figure 9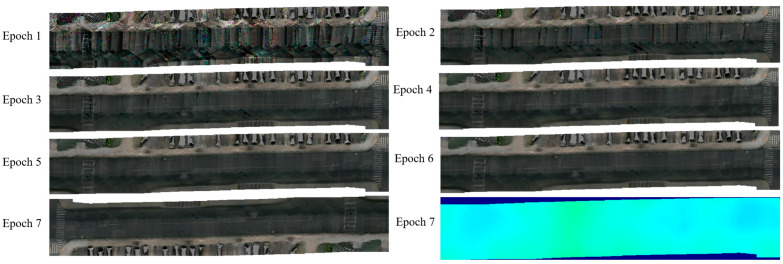 Figure 10
Figure 10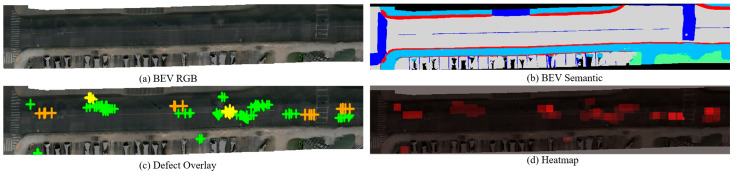 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsInfrastructure Maintenance and Monitoring · Advanced Neural Network Applications · Automated Road and Building Extraction