LEGS: Visual Localization Enhanced by 3D Gaussian Splatting
Daewoon Kim, I-gil Kim

TL;DR
LEGS improves visual localization by using 3D Gaussian Splatting to generate better synthetic camera views for training.
Contribution
LEGS introduces a trajectory-agnostic framework using 3D Gaussian Splatting for efficient and effective synthetic-view augmentation.
Findings
LEGS improves pose accuracy and robustness on standard benchmarks.
The method performs well in scenarios with sparse sampling and co-located viewpoints.
3D Gaussian Splatting enables high-throughput scene-specific synthesis.
Abstract
Accurate six-degree-of-freedom (6-DoF) visual localization is a fundamental component for modern mapping and navigation. While recent data-centric approaches have leveraged Novel View Synthesis (NVS) to augment training datasets, these methods typically rely on uniform grid-based sampling of virtual cameras. Such naive placement often yields redundant or weakly informative views, failing to effectively bridge the gap between sparse, unordered captures and dense scene geometry. To address these challenges, we present LEGS (Visual Localization Enhanced by 3D Gaussian Splatting), a trajectory-agnostic synthetic-view augmentation framework. LEGS constructs a joint set of 6-DoF camera pose proposals by integrating a coarse 3D lattice with the Structure-from-Motion (SfM) camera graph, followed by a visibility-aware, coverage-driven selection strategy. By utilizing 3D Gaussian Splatting…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
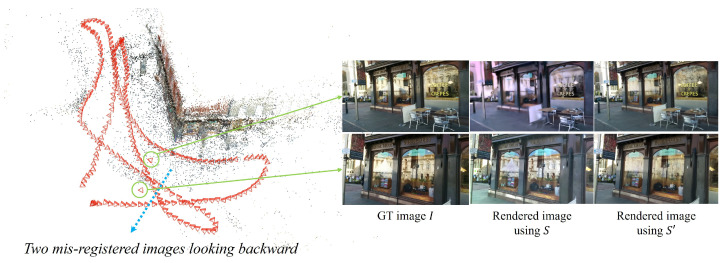 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4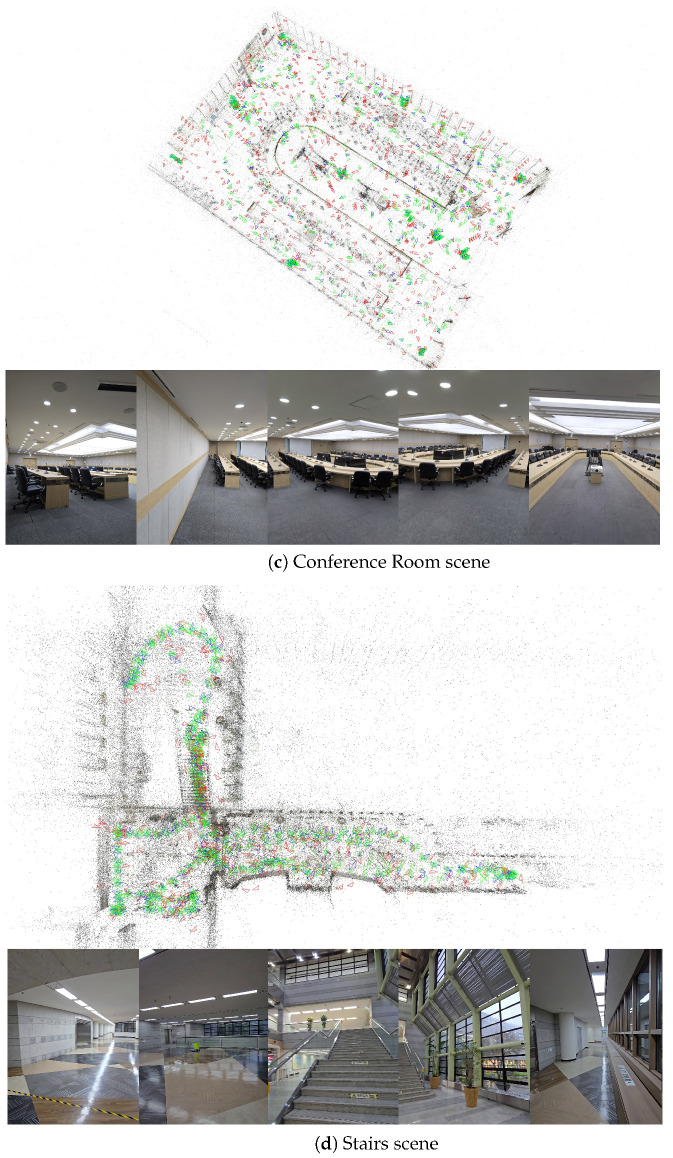 Figure 5
Figure 5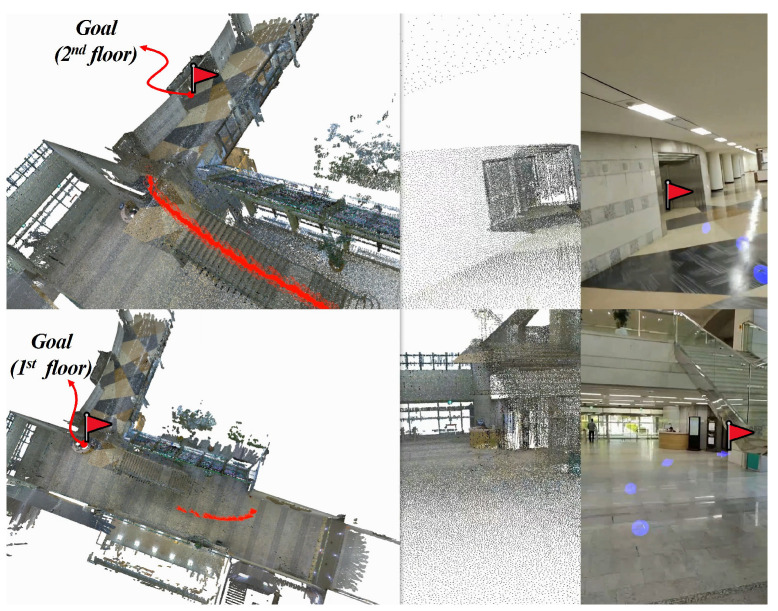 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · 3D Shape Modeling and Analysis