Multi-mode fault diagnosis datasets of three-phase asynchronous motor under variable working conditions
Shijin Chen, Zeyi Liu, Chenyang Li, Dongliang Zou, Xiao He, Donghua Zhou

TL;DR
This paper introduces a dataset for diagnosing faults in three-phase motors under varying speeds and loads, using vibration and current signals.
Contribution
The novelty lies in providing a comprehensive dataset with diverse fault types and severities under variable motor operating conditions.
Findings
The dataset includes single and compound faults like rotor unbalance and stator winding short circuits.
Data were collected under both steady and transitional conditions with triaxial vibration and three-phase current signals.
The dataset supports robust fault diagnosis methods under realistic industrial conditions.
Abstract
Three-phase asynchronous motor are fundamental components in industrial systems, and their failure can lead to significant operational downtime and economic losses. Vibration and current signals are effective indicators for monitoring motor health and diagnosing faults. However, motors in real applications often operate under variable conditions such as fluctuating speeds and loads, which complicate the fault diagnosis process. This paper presents a comprehensive dataset collected from a three-phase asynchronous motor under various fault types and severities, operating under diverse speed and load conditions. The dataset includes both single faults and mechanical-electrical compound faults, such as rotor unbalance, stator winding short circuits, bearing faults, and their combinations. Data were acquired under both steady and transitional conditions, with signals including triaxial…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
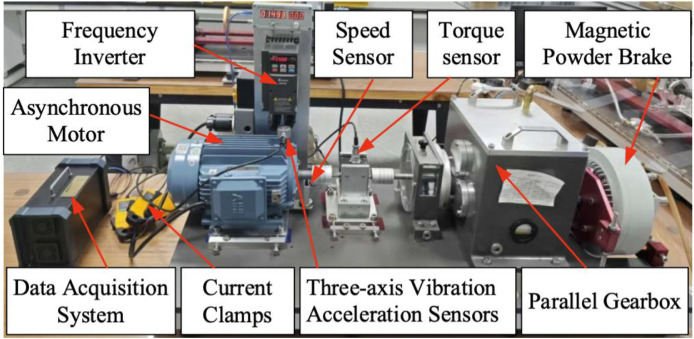 Figure 1
Figure 1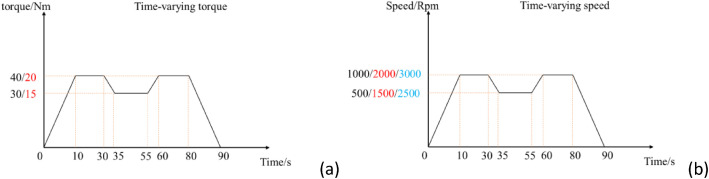 Figure 2
Figure 2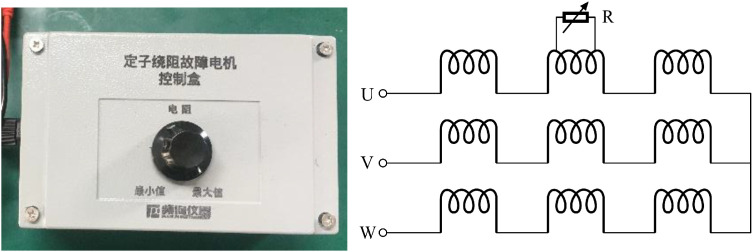 Figure 3
Figure 3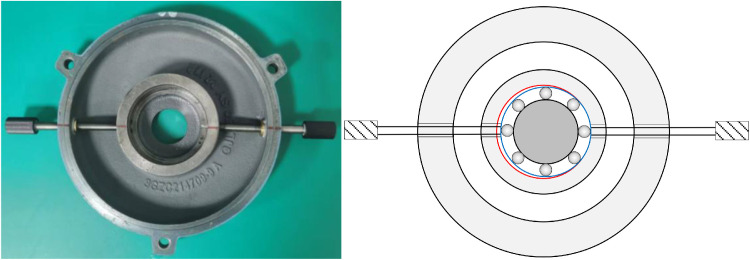 Figure 4
Figure 4 Figure 5
Figure 5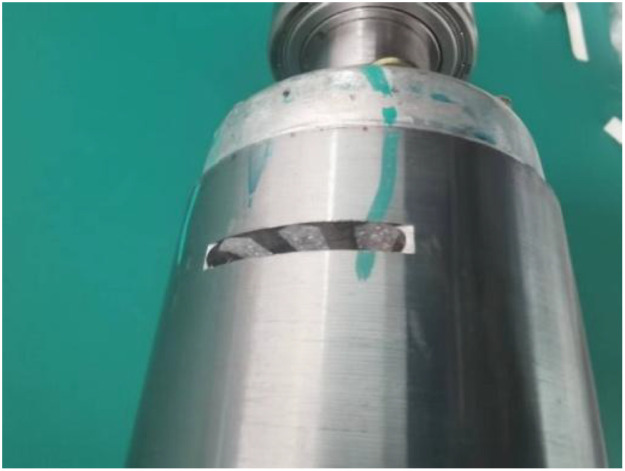 Figure 6
Figure 6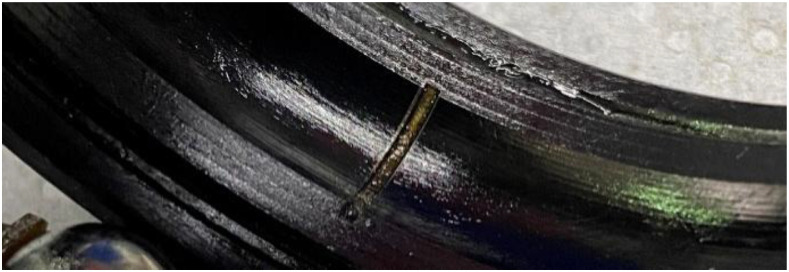 Figure 7
Figure 7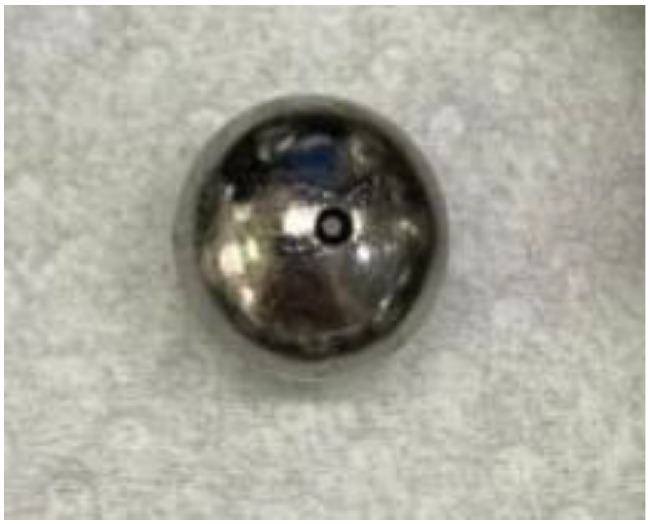 Figure 8
Figure 8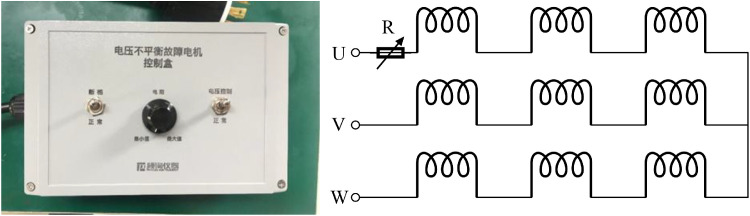 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMachine Fault Diagnosis Techniques · Multilevel Inverters and Converters · Power Systems Fault Detection
Specifications TableSubjectMechanical engineeringSpecific subject areaMachine condition monitoring, motor fault diagnosisType of dataDatasets in “.csv” formatData collectionEight-channel synchronous vibration–current–torque–keyphase data were recorded from a 2.2 kW three-phase induction motor under variable speed/load profiles at 12.8 kHz. Controlled single and compound faults were physically introduced and measured over 282 runs (90 s each), saved as CSV files.Data source locationMCC5 Group Shanghai Co. LTD**Department of Automation, Tsinghua UniversityData accessibilityRepository name: Multi-mode Fault Diagnosis Datasets of Three-phase Asynchronous Motor Under Variable Working ConditionsData identification number: 10.17632/6s3dggj9mw.1Direct URL to data: https://data.mendeley.com/datasets/6s3dggj9mw/1Instructions for accessing these data:Related research articleZ. Liu, C. Li and X. He, Evidential ensemble preference-guided learning approach for real-time multimode fault diagnosis, IEEE Transactions on Industrial Informatics, doi:10.1109/TII.2023.3332112.
Value of the Data
1
- •Unlike most publicly available motor fault datasets that focus on single fault types under steady states, this dataset systematically includes 24 fault conditions encompassing not only common single electrical and mechanical faults but also deliberately designed mechanical–electrical compound faults. These data were collected under 12 speed and load profiles, including both steady and transitional conditions, thereby supporting the development and evaluation of diagnostic methods that must perform in real-world, time-varying industrial environments.
- •The simultaneous recording of triaxial vibration, three-phase currents, torque, and key-phase signals at 12.8 kHz provides a coherent multimodal perspective on fault evolution. Researchers can exploit the complementary nature of vibration (sensitive to mechanical impacts) and current (sensitive to electromagnetic anomalies) signals to develop fusion-based or cross-domain diagnostic models, which are promising for improving the accuracy and robustness of fault isolation, especially for compound faults.
- •The dataset is structured with clearly defined operating condition variations and fault severity levels, allowing systematic investigation into domain adaptation, transfer learning, and generalization of data-driven models across different working conditions. This addresses a key challenge in industrial applications where models trained under one condition often degrade when applied to another.
- •With well-documented fault types, severity levels, and condition labels, the dataset is suitable for validating classical signal processing and machine learning methods. At the same time, the raw, high-sample-rate, multi-channel time-series format allows researchers to design and test deep neural networks for raw signal classification, feature learning, and real-time diagnosis.
- •All data are publicly accessible in a standardized CSV format with detailed metadata describing each test run. This transparency enables other researchers to replicate studies, compare algorithm performance under consistent conditions, and accelerate progress in motor fault diagnosis research.
Background
2
As a core component of electrically driven systems, the asynchronous motor is widely employed in industrial and mining enterprises due to its straightforward control and low maintenance requirements, serving as a prime mover for various types of machinery and industrial equipment. The motor is composed of the stator, rotor, air gap, and bearings, among other components, where the stator generates a rotating magnetic field and the rotor induces current to produce torque. Although its [4] structure is relatively simple, harsh operating conditions, such as heavy loads, challenging environments, and complex electromagnetic interactions, often lead to incipient faults during operation [5,6]. Common failures include inter-turn short circuits in stator windings, broken rotor bars, bearing damage, air gap eccentricity, and rotor imbalance [7,8]. As depicted in Table 1, our dataset offers advantages over existing representative datasets.Table 1. Comparison of several representative datasets.Table 1 dummy alt textTaiyuan University of Technology [1]Huazhong University of Science and Technology [2]Korea Advanced Institute of Science and Technology [3]MCC5-THU motor fault diagnosis datasetsNumber of fault types66224Number of signals9348Sampling frequency/25.6 kHz25.6 kHz12.8 kHzSampling period//120 s90 sNumber of steady conditions/2124Key variables/Speed/Speed, LoadNumber of transitional conditions0/048Number of compound faults1/09Number of fault degrees of severity3/>102
In motor fault diagnosis, stator current signals are widely adopted for online detection of rotor bar breakages due to their easy acquisition and robustness to external disturbances. Meanwhile, vibration signals collected from bearings via sensors allow for the extraction of characteristic fault-related frequencies, representing one of the most direct and effective approaches for diagnosing mechanical faults in bearings [9,10]. As an exemplary electromechanical device, motor faults can originate from either electrical or mechanical components. In industrial practice, distinguishing between mechanical and electrical faults is often challenging due to their similar manifestations, which significantly hinders the efficiency of on-site diagnosis. Therefore, establishing a comprehensive motor fault dataset that incorporates multi-source information such as vibration and current signals is crucial. Analysing motor conditions from both electrical and mechanical perspectives can substantially improve the accuracy and efficiency of fault diagnosis.
Data Description
3
The experimental setup, shown in Fig. 1, consists of a 2.2 kW three-phase asynchronous motor, a torque sensor, a two-stage parallel gearbox (with planetary gearbox removed), a magnetic powder brake serving as the load, and a measurement and control system. Faults were introduced by replacing bearings at the drive end and fan end of the motor, simulating single and compound faults under various operating conditions. Detailed motor and bearing specifications are provided in Table 2, Table 3, respectively.Fig. 1. The actual motor test rig.Fig 1 dummy alt textTable 2Motor parameters.Table 2 dummy alt textParameterValueParameterValueMotor patternQABP-90L2Stator inner diameter72 mmPoles of pair2Stator outer diameter130 mmSingle-side air gap length0.5 mmRotor inner diameter25 mmBearings6205.2Z-C3/6205.2Z-C3Rotor outer diameter71 mmTable 3Bearing parameters.Table 3 dummy alt textParameterValuePitch diameter39.04 mmBall diameter7.94 mmBall number9Contact angle39.04 mm
A total of 282 test runs were conducted under 12 operating conditions, covering both steady and transitional states. Load-time and speed-time profiles are illustrated in Fig. 2(a) and Fig. 2(b), respectively. The dataset includes 24 fault types, encompassing healthy state, rotor imbalance, bending, broken bars, stator winding short circuits (low and high severity), voltage unbalance, static and dynamic eccentricity, bearing faults (inner, outer, ball, and compound), and mechanical-electrical compound faults.Fig. 2. Time-varying operating condition curve (a) Time-varying torque curve (b) Time-varying speed curve.Fig 2 dummy alt text
Data were acquired at a sampling frequency of 12.8 kHz through 8 synchronous channels: key-phase, torque (measured using torque sensor model S2001, ±0.5 %F.S accuracy, sensitivity 100 mV/Nm), triaxial motor vibration (measured using three-axis vibration acceleration sensors model TES001V, sensitivity 100 mV/g), and three-phase currents (measured using current clamps model Fluke-i30s, sensitivity 100 mV/A). All recorded data represent raw voltage values, which can be converted into the corresponding physical quantities using the sensitivity coefficients provided above. Each data file contains 9 columns, and the meaning of each column of data is as shown in Table 4.Table 4. The meaning of each column in the dataset.Table 4 dummy alt textColumnMeaningFirst columnSampling timeSecond columnMotor key-phase signal, from which the rotational speed can be derivedThird columnTorque on the gearbox input shaftFourth columnVibration acceleration at the motor drive end in the horizontal radial directionFifth columnVibration acceleration at the motor drive end in the axial directionSixth columnVibration acceleration at the motor drive end in the vertical radial directionSeventh columnPhase A current of the motorEighth columnPhase B current of the motorNinth columnPhase C current of the motor
A subset of filenames is provided in Table 5 to illustrate the corresponding operating conditions and fault types.Table 5. Example description of a partial dataset file.Table 5 dummy alt textFilenameDescriptionBearing_inner_L_speed_circulation_20Nm_1000rpmThe dataset was acquired from a motor with a light-severity inner raceway defect (length: 0.2 mm, depth: 0.5 mm), operating at a constant output torque of 20 Nm and following the 0–1000 rpm speed-time profile in Fig. 2(b).Bearing_inner_L_torque_circulation_20Nm_1000rpmThe dataset was acquired from a motor with a light-severity inner raceway defect (length: 0.2 mm, depth: 0.5 mm), operating at the 1000 rpm. The torque-time curve 0–20NM shown in Fig. 2(a).Bearing_inner_H_speed_circulation_20Nm_1000rpmA motor dataset for high-severity inner raceway fracture. Single fracture length is 0.6 mm and depth is 0.5 mm. Motor output shaft torque is 20 Nm. The motor shaft rotates at the 0–1000 rpm speed-time curve shown in Fig. 2(b).Bearing_inner_H_torque_circulation_20Nm_1000rpmA motor dataset for high-severity inner raceway fracture. Single fracture length is 0.6 mm and depth is 0.5 mm. Motor shaft rotates at the 1000 rpm. The torque-time curve 0–20NM shown in Fig. 2(a).Winding_H_and_bearing_outer_H_speed_circulation_20Nm_1000rpmA motor dataset for high winding short circuit and high outer raceway fracture. The winding fault is a 10 % short circuit fault in a single winding. Single fracture length is 0.6 mm and depth is 0.5 mm. Motor shaft rotates at the 1000 rpm. The torque-time curve 0–20NM shown in Fig. 2(b).Winding_H_and_bearing_inner_H_torque_circulation_40Nm_3000rpmA motor dataset for high winding short circuit and high inner raceway fracture. The winding fault is a 10 % short circuit fault in a single winding. Single fracture length is 0.6 mm and depth is 0.5 mm. Motor shaft rotates at the 3000 rpm. The torque-time curve 0–40NM shown in Fig. 2(a).
Experimental Design, Materials and Methods
4
The test rig (Fig. 1) comprises a 2.2 kW three-phase asynchronous motor, a torque sensor a two-stage parallel gearbox, and a magnetic powder brake serving as the load. A triaxial vibration acceleration sensor was mounted on the motor drive end. Vibration, three-phase current, torque, and key-phase signals were synchronously acquired at a sampling frequency of 12.8 kHz using a multi-channel data acquisition system. This frequency was chosen as it according to the Nyquist sampling theorem is more than twice the highest characteristic frequency of all targeted motor faults (e.g., bearing defect frequencies and current harmonics), while also maintaining a manageable data volume for the multi-channel, long-duration recordings. The motor was tested under 12 operating conditions, including constant speed with variable load and constant load with variable speed. The laboratory temperature was controlled within ±2 °C to minimize experimental error. Faults were introduced via laser etching with a precision of 0.01 mm. The dataset includes 282 test recordings, each 90 s long, stored in CSV format.
Two load scenarios were implemented: constant-speed variable-torque and constant-torque variable-speed operations, as illustrated in Fig. 2, Fig. 2, respectively. For constant-speed variable-torque cases (Fig. 2a), motor speed was held constant at 1000, 2000, or 3000 rpm. For example, under the 0–15–20 Nm condition, torque was set to 20 Nm during 10–30 s and 60–80 s intervals, and to 15 Nm during 35–55 s. For constant-torque variable-speed cases, load was maintained at 20 Nm or 40 Nm while speed followed the profile in Fig. 2(b). Due to magnetic hysteresis in the motor and torque generator, actual speed-torque-time profiles exhibited slight deviations from preset trajectories.
To simulate inter-turn stator winding faults caused by insulation degradation, a variable shunt resistor was connected in parallel across two taps of the target phase winding, as illustrated in Fig. 3. The equivalent shunt resistance, Rf, could be adjusted from infinity (healthy condition) to near zero (severe short circuit). Two distinct fault severity levels were achieved by tuning Rf to induce circulating currents equivalent to 5 % and 10 % of the rated phase current, respectively. These levels were subsequently used to quantify fault-related signatures.Fig. 3. Stator winding fault controller.Fig3 dummy alt text
Static radial eccentricity was introduced by symmetrically installing two fine-adjustment screws on the motor end shield. To achieve pure radial offset without inducing a net moment on the shaft, diametrically opposed screw pairs were adjusted in a coordinated manner (one advanced while the other retracted). The resulting eccentricity was measured using a dial indicator, calibrated such that one full screw rotation produced a 0.250 mm radial displacement. To simulate progressive static eccentricity and facilitate comparative analysis of fault-induced features under different load conditions, two severity levels were implemented—corresponding to radial offsets of 0.125 mm and 0.250 mm (Fig. 4). Rotor unbalance was induced by attaching an imbalance mass to the rotor shaft, as shown by the dashed outline in Fig. 5.Fig. 4. Static-eccentricity setting screws.Fig 4 dummy alt textFig. 5Dynamic unbalance.Fig 5 dummy alt text
Broken rotor bar fault was simulated by deliberately removing three consecutive rotor bars, as depicted in Fig. 6. To compensate for the resultant mass loss and avoid introducing mechanical imbalance, counterweights were added to the end ring. This rebalancing ensured that the broken bar fault remained the sole electrical anomaly, thereby preventing contamination of subsequent analysis by other defect types.Fig. 6. Broken rotor bar.Fig 6 dummy alt text
Bearing faults were systematically categorized into three types: outer raceway, inner raceway, and rolling element damage. The dataset is limited to single-point raceway faults, as field data indicates simultaneous damage to both inner and outer races is rare. Consequently, defects were introduced exclusively on either the inner or the outer raceway, ensuring unambiguous attribution of characteristic frequencies, specifically the Ball Pass Frequency Inner race (BPFI) and the Ball Pass Frequency Outer race (BPFO).
All experiments employed SKF 6205 deep-groove ball bearings. Raceway notches were fabricated using a laser cutting process with dimensional tolerances of ±0.01 mm. Fig. 7 shows an outer raceway defect, with Table 6 summarizing the width and depth dimensions corresponding to mild and severe damage levels.Fig. 7. Outer ring raceway damage.Fig 7 dummy alt textTable 6Raceway fault parameters.Table 6 dummy alt textFault parameter of bearingLightHighInner fault width0.2 mm0.6 mmInner fault depth0.5 mm0.5 mmOuter fault width0.2 mm0.6 mmOuter fault depth0.5 mm0.5 mm
Rolling element damage, characterized by the Ball Spin Frequency (BSF), was implemented by introducing a 360° circumferential pitting on a single ball. The uniform distribution of the pits ensures contact with the raceways during every ball rotation (Fig. 8).Fig. 8. Rolling element damage.Fig 8 dummy alt text
Finally, Table 7 lists the dimensionless fault frequency coefficients, defined as the ratio of the actual fault frequency to the shaft rotational frequency.Table 7. Relative bearing damage frequencies.Table 7 dummy alt textBearingBPFOBPFIBSFSKF 6205 2ZC33.5855.4152.357
To simulate a bent shaft condition, the motor rotor assembly was subjected to a four-point bending test, resulting in a permanent shaft bend of 0.2 mm. Voltage unbalance was simulated by connecting an external resistor in series with one phase of the motor power supply. Rotating a control knob increased the series resistance: when the resistor was bypassed (knob at minimum position), the phase voltage equaled the rated supply voltage; at the maximum knob position, the reduced current in that phase caused a measurable voltage drop at the motor terminals, creating voltage unbalance. Two calibrated knob positions, corresponding to 4 % and 8 % voltage unbalance levels, were used to generate different fault severities (Fig. 9).Fig. 9. Voltage unbalance fault controller.Fig 9 dummy alt text
To further investigate the electromechanical coupling between motor-side electromagnetic anomalies and mechanical bearing degradation, the dataset incorporates multiple compound-fault scenarios in which a controlled bearing defect is introduced concurrently with another representative fault source. Specifically, a localized outer-race bearing defect is combined with (i) a fixed static radial offset to emulate static eccentricity, enabling analysis of eccentricity–bearing cross-effects; (ii) rotor unbalance to study interaction mechanisms between mass-imbalance–induced excitation and bearing deterioration; (iii) broken rotor bars to couple an electrical asymmetry with mechanical bearing damage; and (iv) an inter-turn winding short circuit to quantify electromagnetic–mechanical cross-modulation, where uneven phase magnetomotive forces and localized heating induce fault-related magnetic force fluctuations that may further interact with bearing-surface damage. Across these conditions, the two fault sources are introduced independently and then applied simultaneously, providing a systematic basis for characterizing coupled signatures and cross-modulation in compound electromechanical faults.
USAGE notes
4.1
The dataset supports multiple benchmark task formulations. Representative examples and recommended practices are outlined below to facilitate the establishment of reproducible experimental settings under varying research objectives. In-condition diagnosis can be defined by partitioning the training, validation, and test sets within a single set of operating conditions, maintaining consistent fault-class proportions across splits. To prevent information leakage, it is advisable to first split at the recording-run level before applying windowing or segmentation, ensuring that samples from the same run do not appear in both training and testing sets. Unknown-condition evaluation can be instantiated by reserving one or more operating-condition groups as the test set, with training and model selection limited to the remaining known-condition groups. The validation set should be drawn exclusively from the known-condition pool. It is further recommended to report both overall metrics and condition-grouped metrics to evaluate robustness under operating-condition shifts. Transitional-condition robustness can be assessed by training on steady-state condition groups and testing on transitional or time-varying regimes. As with other settings, run-level splitting prior to segmentation is essential. Time-resolved or segment-level metrics may be additionally employed to capture performance degradation under nonstationary conditions.
Beyond task partitioning, the adoption of a consistent signal-processing pipeline enhances comparability and reproducibility. Sample construction can employ fixed-length sliding windows, with window length selected based on the target feature scale and an appropriate overlap ratio. Preprocessing may include mean removal or detrending, and high-pass or band-pass filtering should be applied according to the sampling bandwidth to mitigate drift and noise. Identical filtering parameters must be used across training and testing. Channel-wise normalization is recommended, using training-set statistics for standardization or amplitude normalization, and applying the same transformation to the validation and test sets to avoid test data leakage. These guidelines are recommended, not prescriptive, and may be adapted to specific research objectives, provided that partitioning remains leakage-free and preprocessing remains consistent.
Limitations
Despite the comprehensive coverage of fault types and operating conditions, the dataset is limited to single-point bearing faults and does not include distributed or progressive fault patterns that may occur in long-term service. Additionally, the fault severity levels are discretely defined and may not fully represent the continuous degradation process observed in actual industrial settings. The experiments were conducted under controlled laboratory conditions with minimal electromagnetic interference, which may differ from the complex noise environments encountered in real-world applications.
Ethics Statement
The authors have read and follow the ethical requirements for publication in Data in Brief and confirming that the current work does not involve human subjects, animal experiments, or any data collected from social media platforms.
CRediT authorship contribution statement
Shijin Chen: Conceptualization, Methodology, Writing – original draft. Zeyi Liu: Conceptualization, Methodology, Writing – review & editing. Chenyang Li: Data curation, Investigation, Validation. Dongliang Zou: Conceptualization, Resources, Project administration. Xiao He: Conceptualization, Formal analysis, Supervision. Donghua Zhou: Supervision, Formal analysis.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Motor fault diagnosis dataset. Git Code, 2024. https://gitcode.com/open-source-toolkit/9e 40a (accessed September 10, 2024).
- 2Wang L.Gao Y.Li X.Gao L.Self-supervised-enabled open-set cross-domain fault diagnosis method for rotating machinery IEEE Trans. Ind. Inform.20820241031410324
- 3Jung W.Yun S.H.Lim Y.S.Cheong S.Park Y.H.Vibration and current dataset of three-phase permanent magnet synchronous motors with stator faults Data Br.47202310895210.1016/j.dib.2023.108952 PMC 995773436852000 · doi ↗ · pubmed ↗
- 4Liu Z.Li C.He X.Evidential ensemble preference-guided learning approach for real-time multimode fault diagnosis IEEE Trans. Ind. Inform.204202454955504
- 5Chen S.Liu Z.He X.Zou D.Zhou D.Multi-mode fault diagnosis datasets of gearbox under variable working conditions[J]Data Br.54202411045310.1016/j.dib.2024.110453 PMC 1107067038711742 · doi ↗ · pubmed ↗
- 6Han P.Liu Z.He X.Ding S.X.Zhou D.Multi-condition fault Diagnosis of dynamic systems: a survey, insights, and prospects IEEE Trans. Autom. Sci. Eng.2220251572815744
- 7Antonino-Daviu Jose Aviyente Selin Scale invariant feature extraction algorithm for the automatic diagnosis of rotor asymmetries in induction motors [J]IEEE Trans. Ind. Inform.912013100109
- 8Morinigo-Sotelo Daniel Garcia-Escudero L.A.Duque-Perez Oscar Practical aspects of mixed-eccentricity detection in PWM voltage source inverter motors [J]IEEE Trans. Ind Electron.5712010252263