Design and implementation of a low-cost mobile robot prototype for trajectory tracking and robotic swarm tasks in research and educational applications
Donovan A. Porras Minaya, Alejandro J. Arocutipa Zambrano, Joel A. Chura, Jorge L. Huarca

TL;DR
This paper introduces an affordable mobile robot for educational and research use, capable of tracking paths and working in swarms.
Contribution
The novelty lies in the low-cost design with ESP-NOW communication for swarm tasks and precise trajectory tracking.
Findings
The robot successfully navigated around obstacles while maintaining accurate trajectory tracking.
The A* algorithm enabled optimal path calculation and collision avoidance.
The prototype provides an affordable solution for multi-robot system research and education.
Abstract
This work presents the design and implementation of a low-cost mobile robot prototype for trajectory tracking and robotic swarm tasks, aimed at research and educational applications. The robot is equipped with encoders for precise movement control and features wireless communication capabilities, enabling multiple robots to operate together using the ESP-NOW (Espressif’s proprietary wireless protocol) protocol. The input for calculating the trajectory is provided by a camera positioned 1.5 meters away, which analyzes the environment and supplies the necessary data for tracking. The system’s performance was validated through trajectory-following tests, where the robot navigated around several obstacles. The A* algorithm was implemented to calculate optimal paths and avoid collisions, ensuring smooth navigation. The results demonstrated the robot’s ability to effectively handle multiple…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5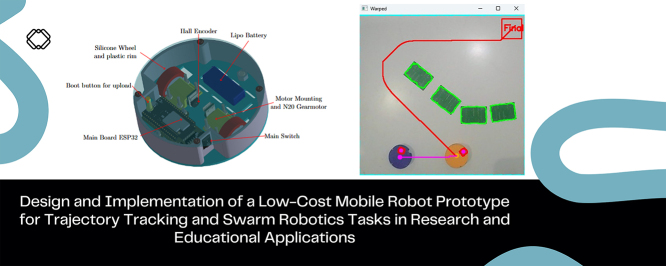 Figure 6
Figure 6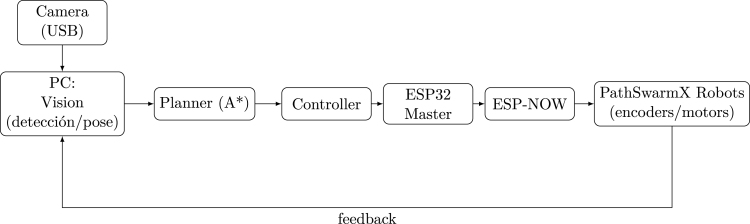 Figure 7
Figure 7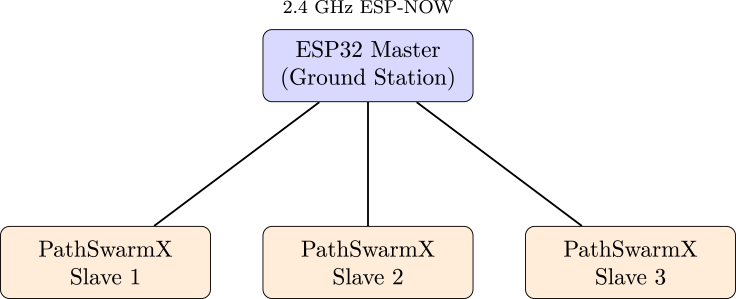 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17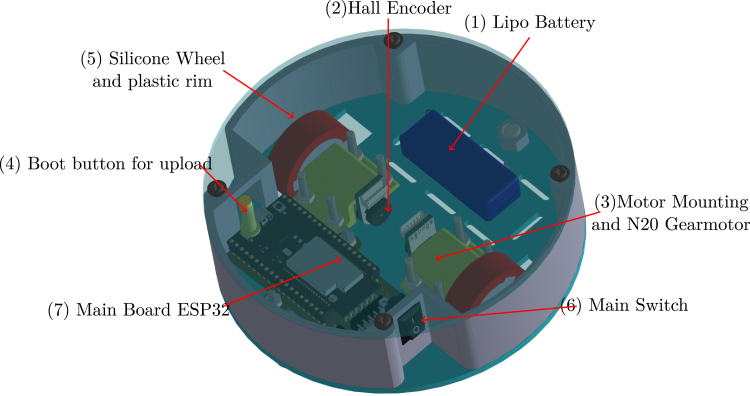 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25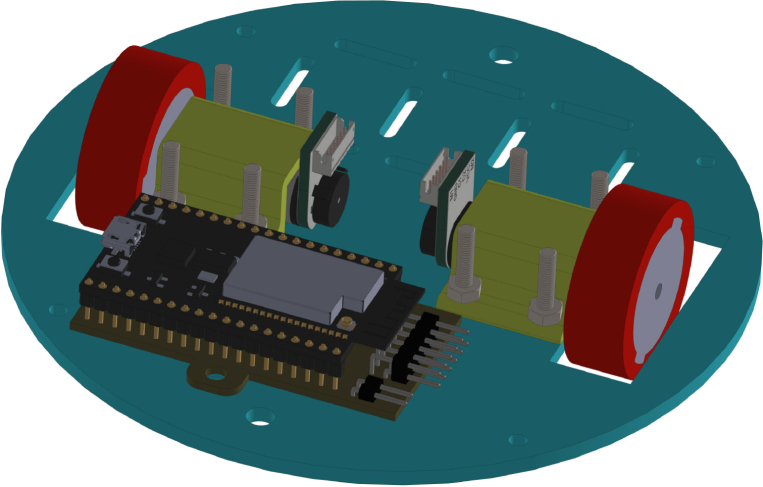 Figure 26
Figure 26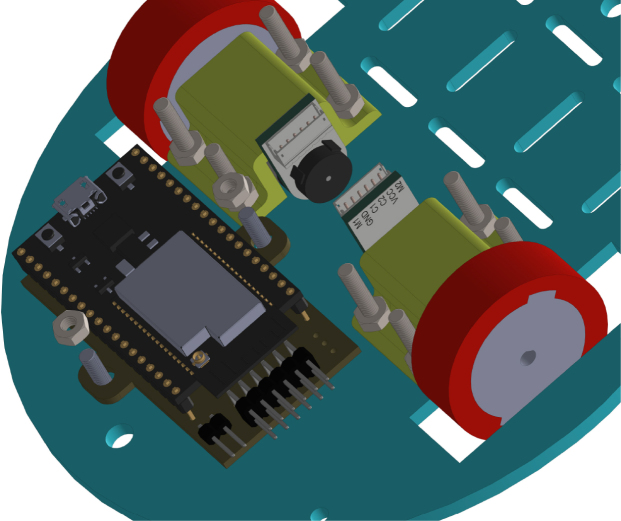 Figure 27
Figure 27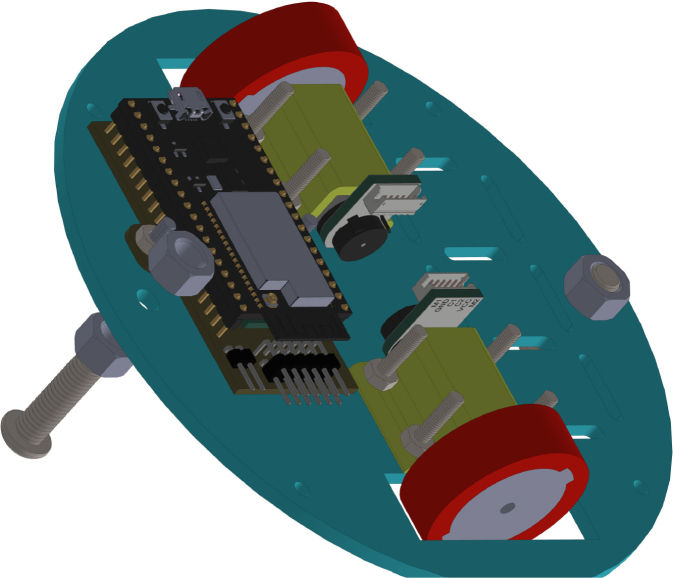 Figure 28
Figure 28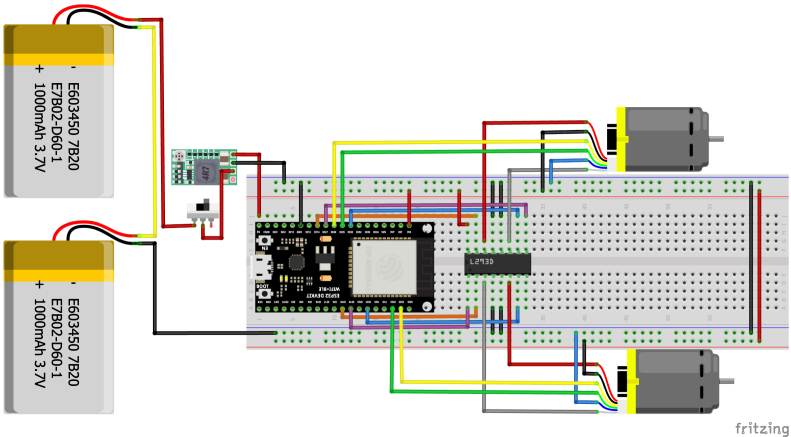 Figure 29
Figure 29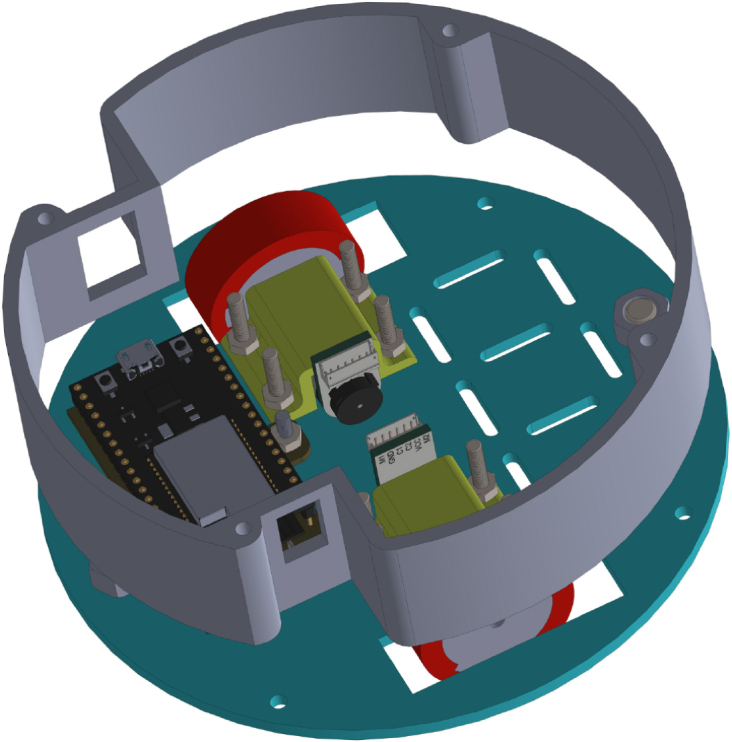 Figure 30
Figure 30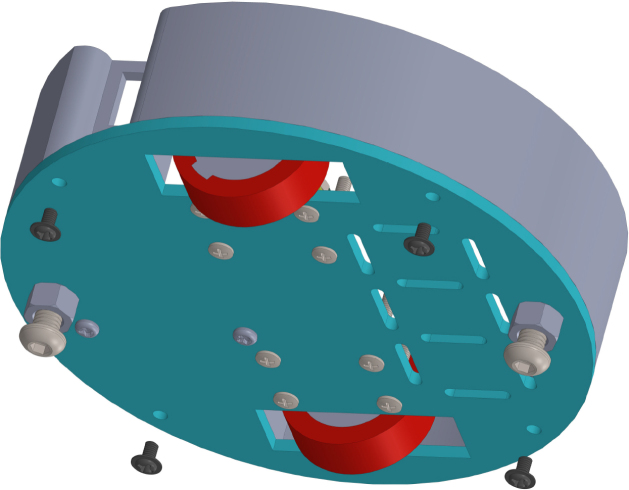 Figure 31
Figure 31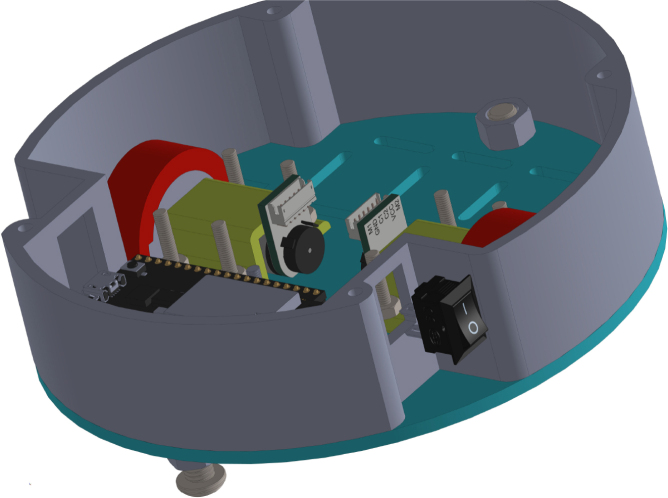 Figure 32
Figure 32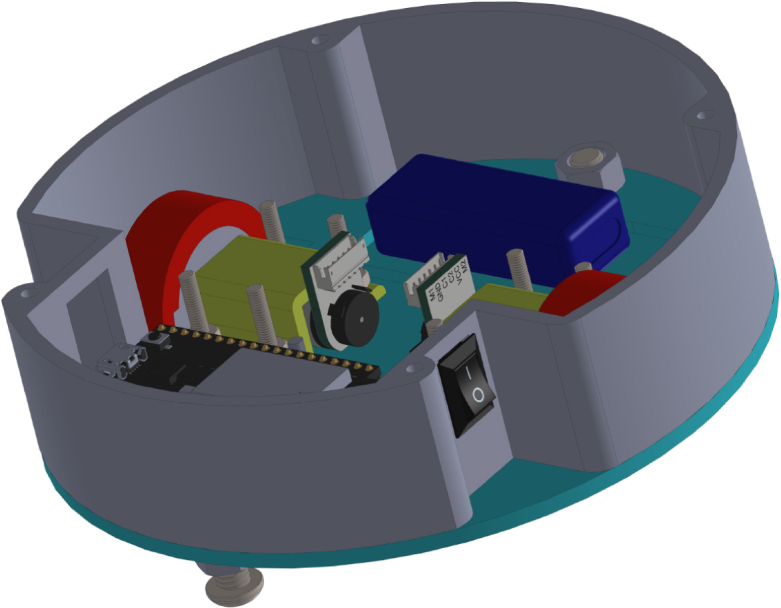 Figure 33
Figure 33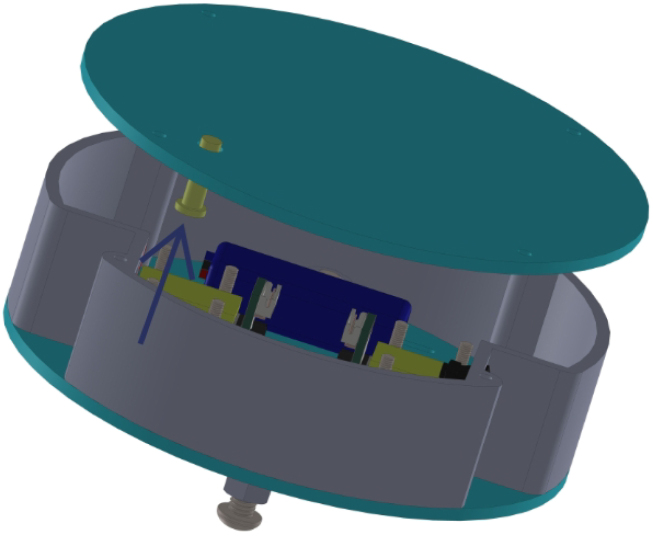 Figure 34
Figure 34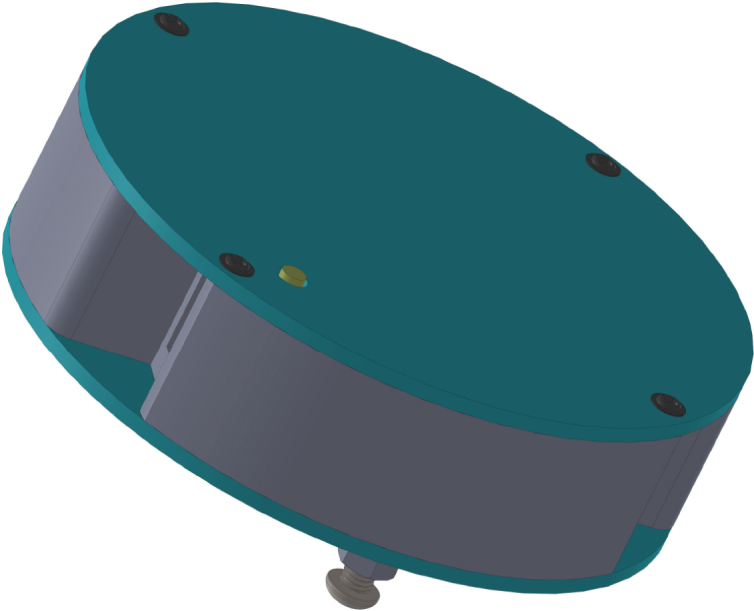 Figure 35
Figure 35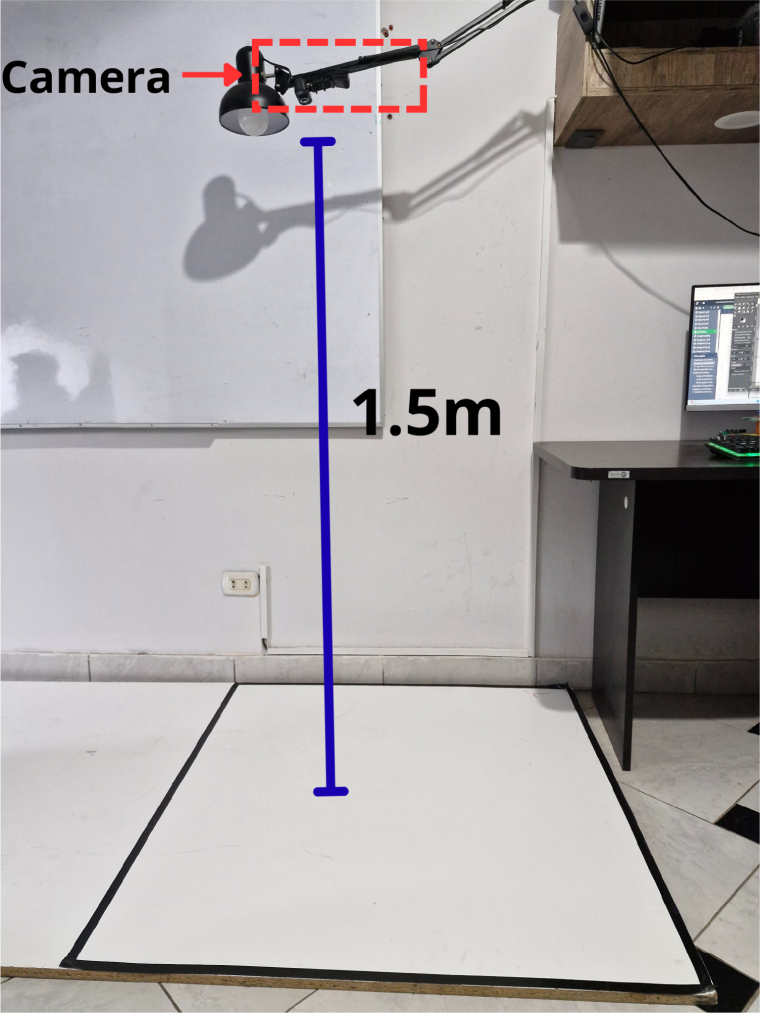 Figure 36
Figure 36 Figure 37
Figure 37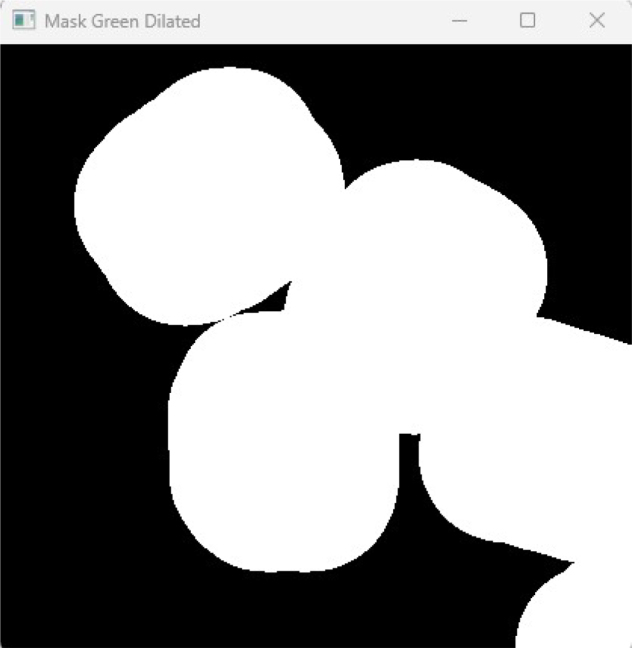 Figure 38
Figure 38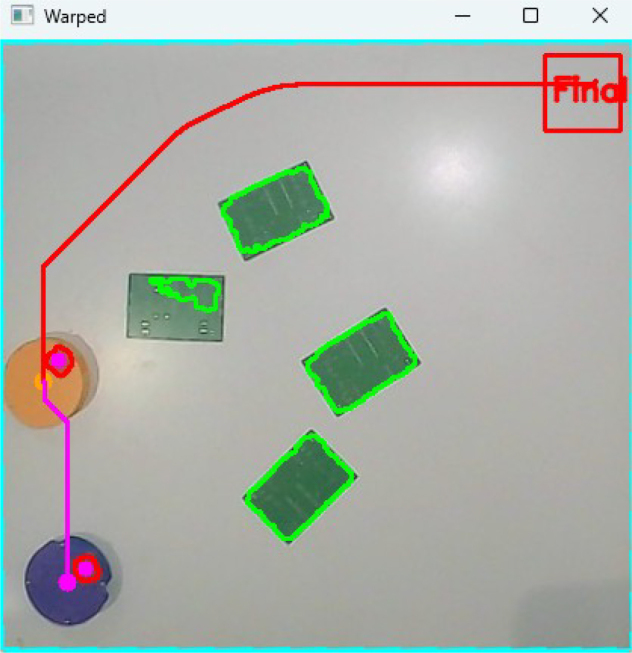 Figure 39
Figure 39 Figure 40
Figure 40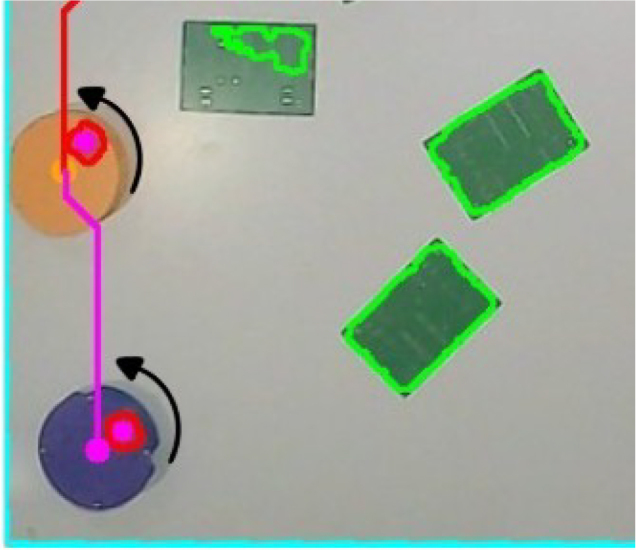 Figure 41
Figure 41Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Control and Dynamics of Mobile Robots · Robotic Locomotion and Control