The ADePT framework for assessing autonomous laboratory robotics
Pablo Salazar-Villacis, Brahim Benyahia

TL;DR
This paper introduces the ADePT framework to evaluate and guide the development of autonomous laboratory robotics.
Contribution
The ADePT framework provides a structured benchmark for assessing robotic capabilities in self-driving laboratories.
Findings
The ADePT framework identifies four core dimensions: adaptability and learning, dexterity, perception, and task complexity.
The framework helps expose bottlenecks and guide the design of autonomous laboratory ecosystems.
Future directions include robot-centric integration and collaborative human–robot environments.
Abstract
Laboratory robotics is advancing from routine automation toward autonomous systems capable of intelligent decision-making and flexible execution. This perspective outlines key milestones and introduces the ADePT framework, which defines four core dimensions of robotic capability proficiency: adaptability and learning, dexterity, perception, and task complexity. We discuss future directions for self-driving laboratories, including robot-centric, end-to-end robotic integration, and collaborative human–robot environments. These scenarios highlight the importance of technological enablers and evolving regulatory paradigms. By connecting present technologies to emerging system configurations, this work offers a foundation for designing autonomous laboratory ecosystems that support scientific discovery and operational efficiency. Laboratory robotics is shifting from scripted automation…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
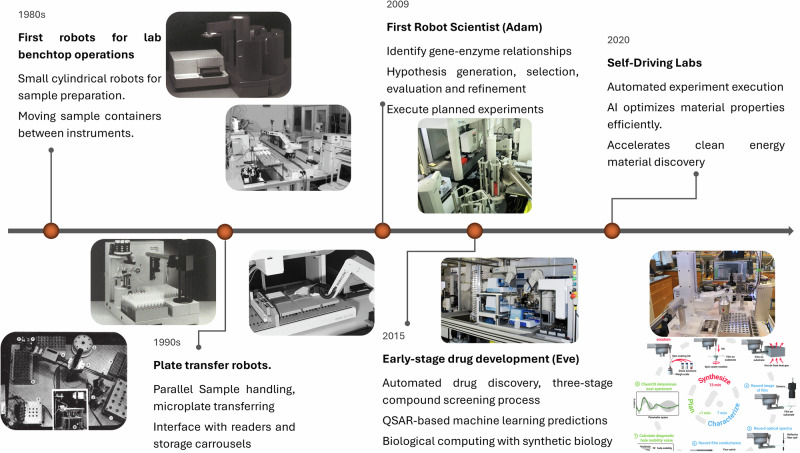 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6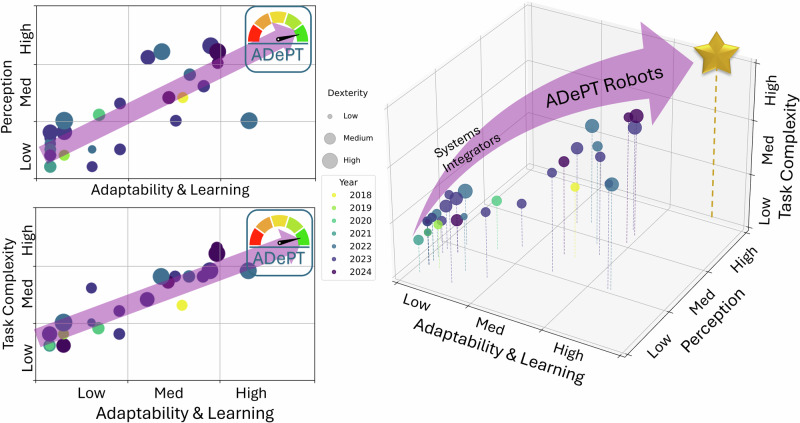 Figure 7
Figure 7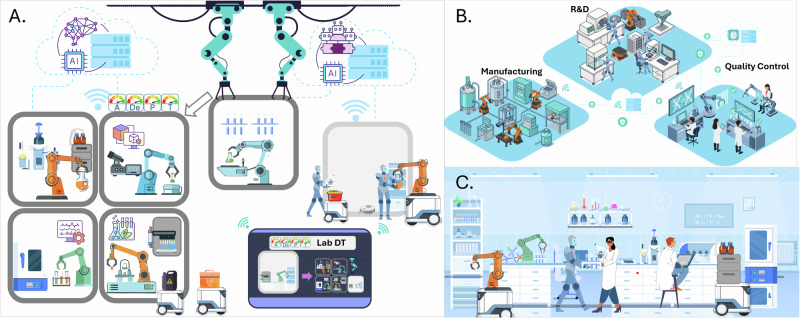 Figure 8
Figure 8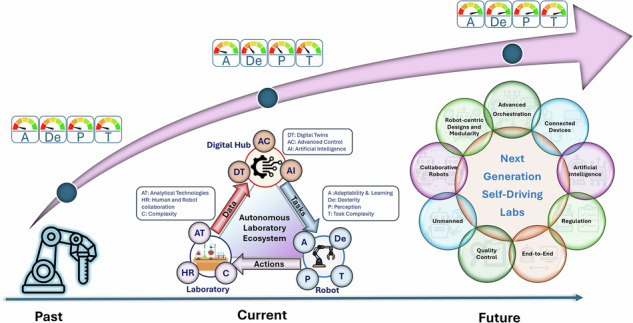 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Human-Automation Interaction and Safety · Social Robot Interaction and HRI