Ultralight soft electrostatic actuators based on solid-liquid-gas architectures
Hyeong-Joon Joo, Toshihiko Fukushima, Xiying Li, Alona Shagan Shomron, Soo Jin Adrian Koh, Philipp Rothemund, Christoph Keplinger

TL;DR
This paper introduces ultralight soft electrostatic actuators that use a solid-liquid-gas design to significantly improve power-to-weight ratio and actuation speed for agile robots.
Contribution
The novel use of gaseous dielectrics in electrostatic actuators to enhance performance and reduce mass.
Findings
A gas mixture of C4F7N and CO2 achieved a specific energy of 51.4 J kg-1, a nine-fold improvement.
Using ambient air as a dielectric still achieved a power-to-weight ratio of 1600 W kg-1.
A jumping robot demonstrated a 60% increase in jump height with the new actuators.
Abstract
Soft actuators enable versatile and adaptable robots capable of operating in unstructured environments and close to humans. Soft electrostatic actuators utilizing electrohydraulic principles are particularly promising, combining all-around actuation performance with portable driving electronics. These electrohydraulic actuators harness liquid dielectrics enclosed in solid dielectric shells to sustain high electric fields; the liquid dielectric however constitutes most of the actuator mass, limiting power-to-weight ratio. Here, we present ultralight soft electrostatic actuators based on solid-liquid-gas architectures: the introduction of gaseous dielectrics as a third phase substantially improves power-to-weight ratio by reducing actuator mass and increasing actuation speed. Through theoretical and experimental analyses, we pinpoint the fundamental performance limit as the electrical…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
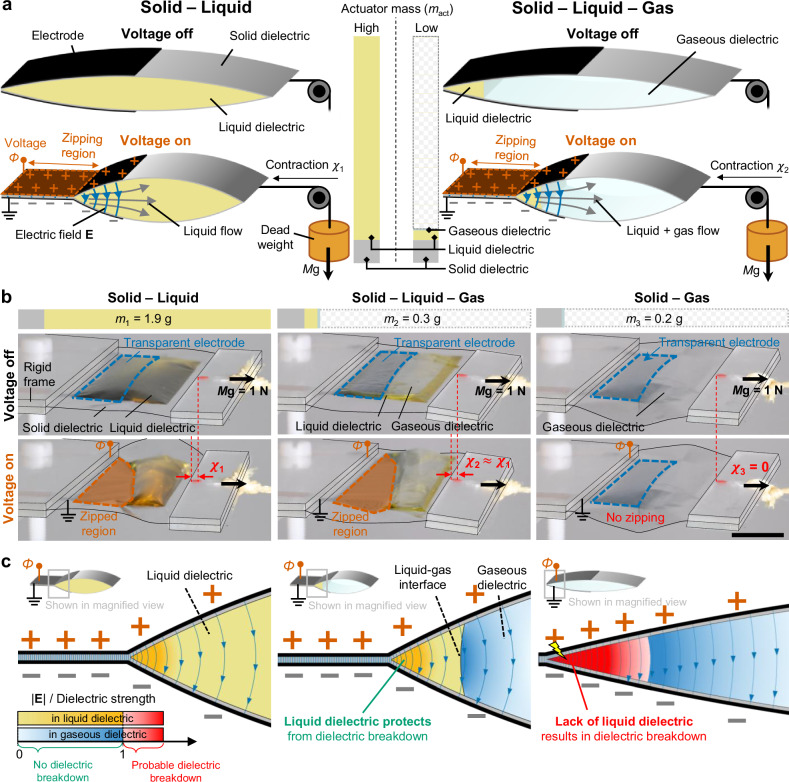 Figure 1
Figure 1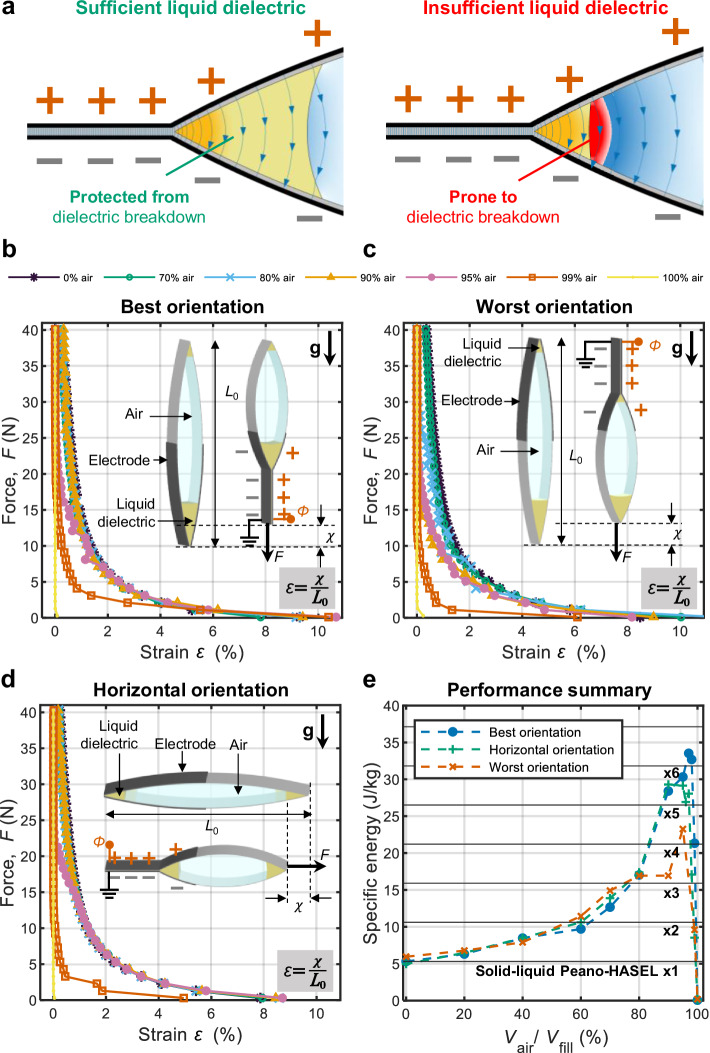 Figure 2
Figure 2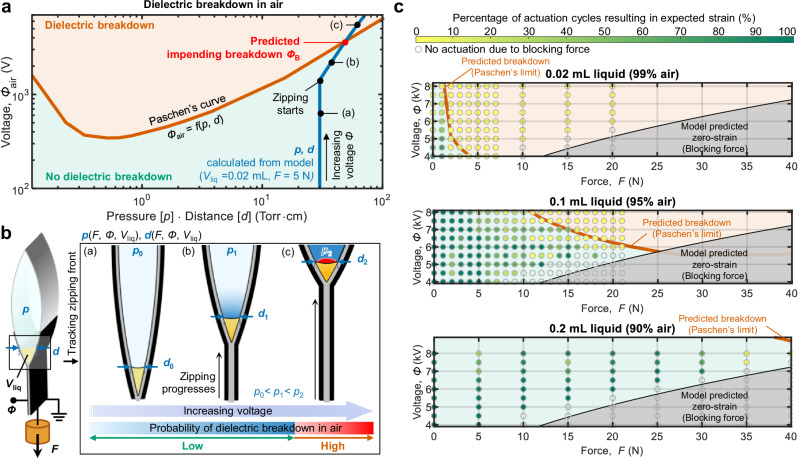 Figure 3
Figure 3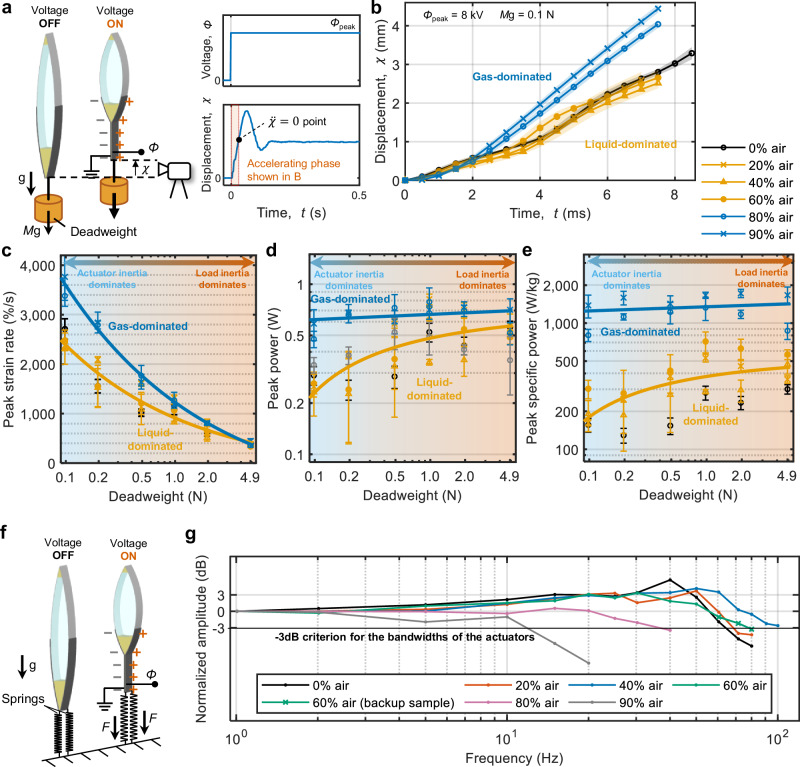 Figure 4
Figure 4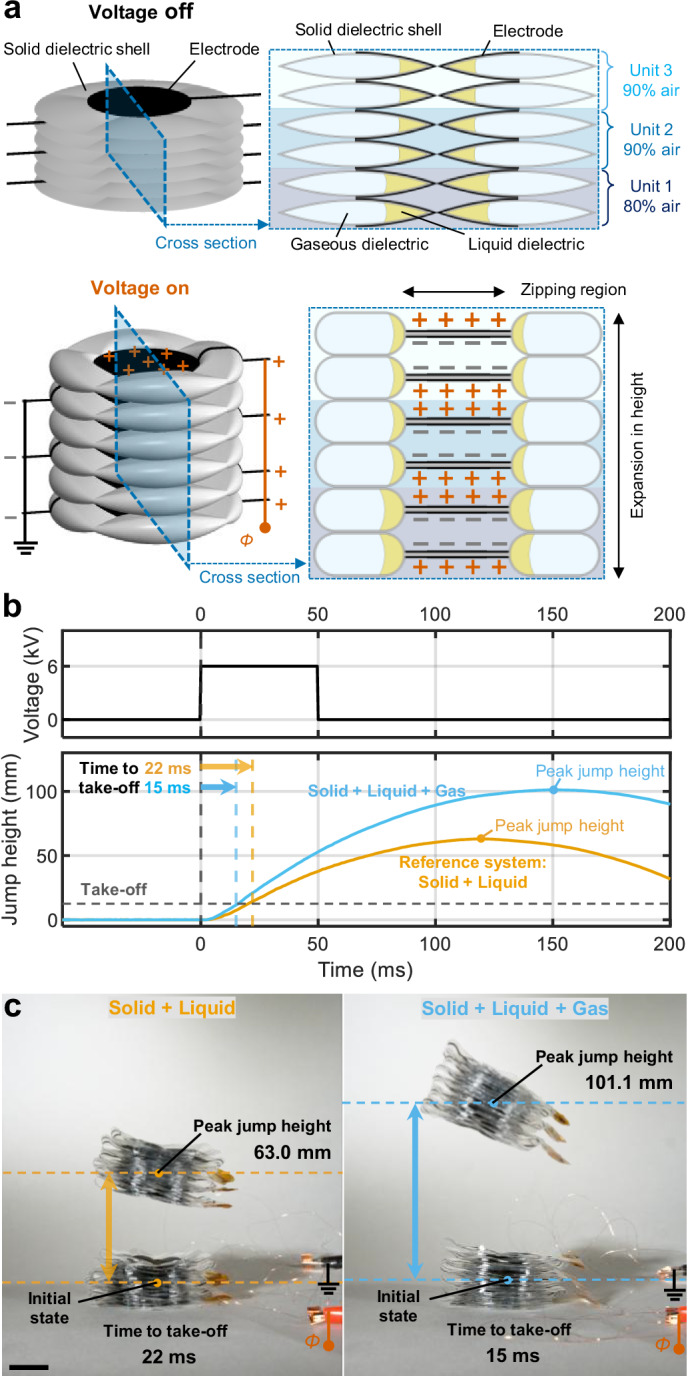 Figure 5
Figure 5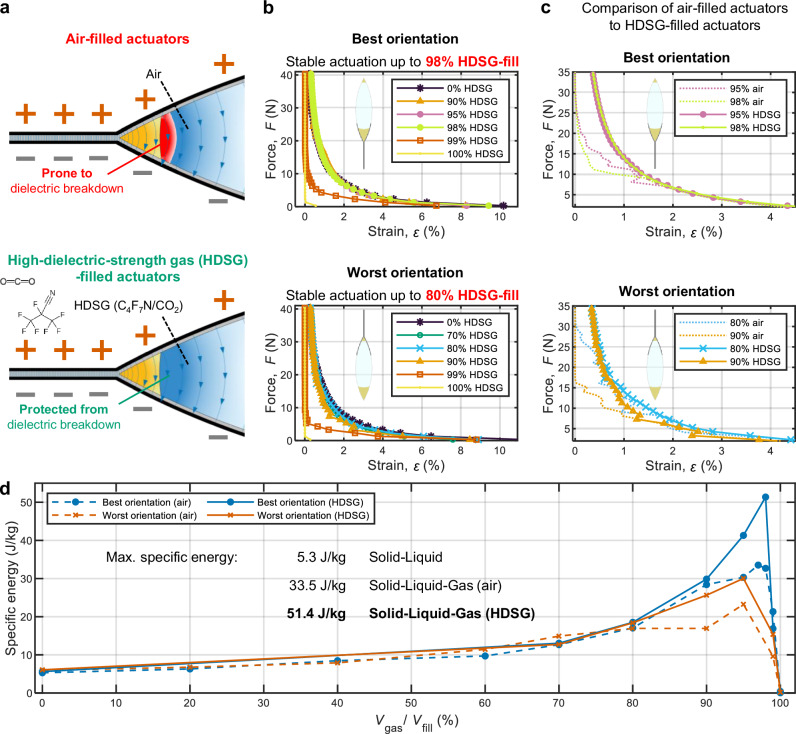 Figure 6
Figure 6 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsDielectric materials and actuators · Advanced Materials and Mechanics · Soft Robotics and Applications