A Versatile Three Dimensional Traction Force Microscopy Framework for Uncovering the Mechanics of Bio‐Adhesion
Yingwei Hou, Fusheng Wang, Tao Liu

TL;DR
This paper introduces a new 3D traction force microscopy method to study bio-adhesion mechanics, enabling precise measurements in both dry and wet environments.
Contribution
The novel framework integrates stereo-DIC and FE simulations to measure microscale forces at bio-adhesive interfaces in 3D.
Findings
The method accurately captures microscale displacements and traction forces in both dry and wet conditions.
The framework was validated using steel ball compression and applied to marine mussel plaque adhesion.
Sensitivity analyses showed the effects of material properties on the results.
Abstract
This study presents a novel, versatile traction force microscopy framework for quantifying three‐dimensional (3D) interfacial forces during bio‐adhesion by integrating in situ stereo‐digital image correlation with finite element (FE) simulation. The method enables accurate measurement of microscale displacements and force distributions at the interfaces in both dry and wet environments, addressing limitations of conventional microscopy techniques related to limited measurement scales, restricted fields of view, and surface disturbance from contact or fluorescence. An analytical model was developed to guide the design of a deformable substrate, supporting selection of subtrate material and thickness of the substrate. System accuracy was examined through steel ball compression experiments, which were validated against FE simulations. The framework was applied to marine mussel plaque…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
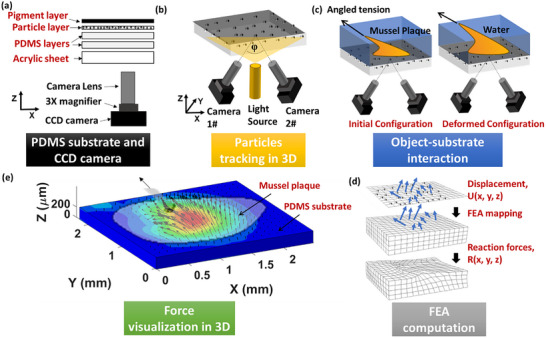 Figure 1
Figure 1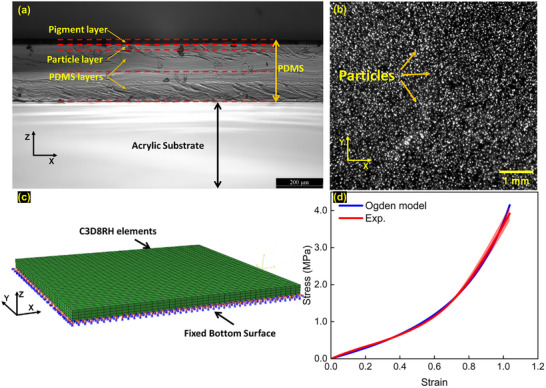 Figure 2
Figure 2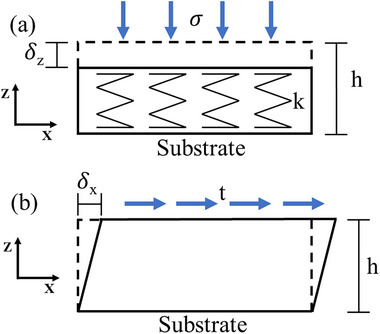 Figure 3
Figure 3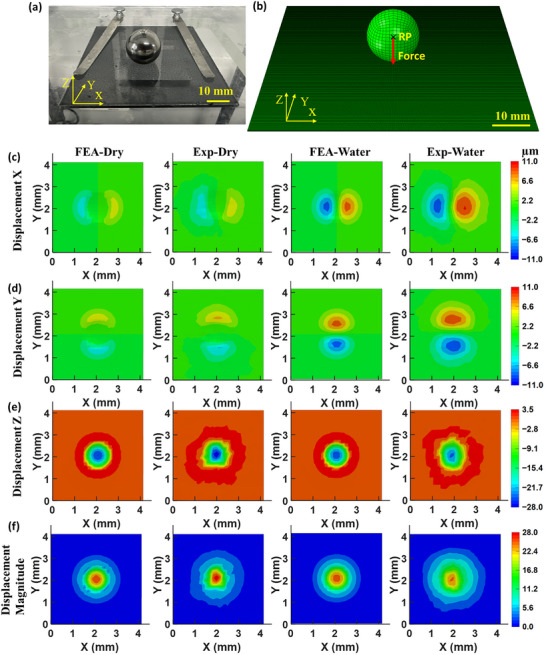 Figure 4
Figure 4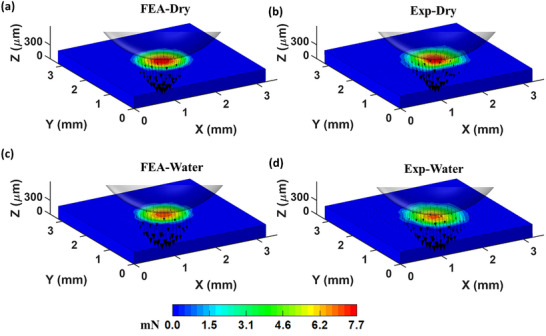 Figure 5
Figure 5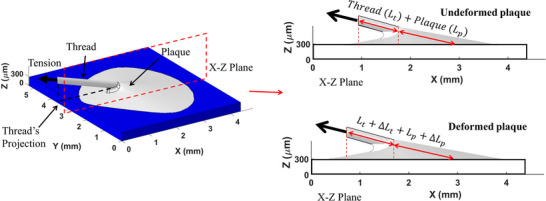 Figure 6
Figure 6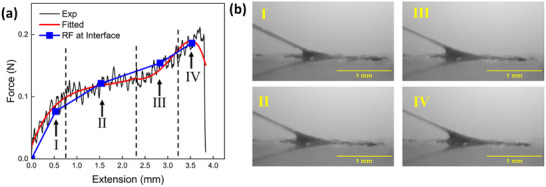 Figure 7
Figure 7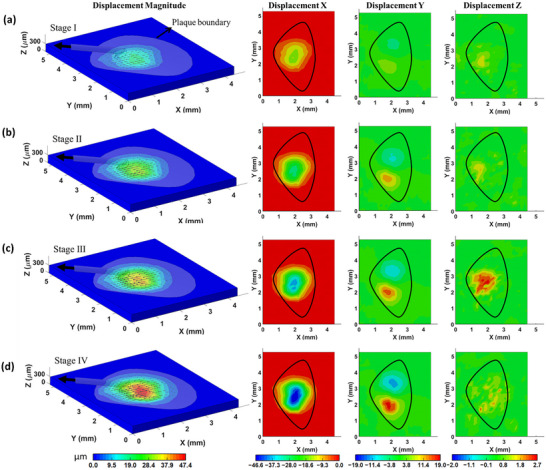 Figure 8
Figure 8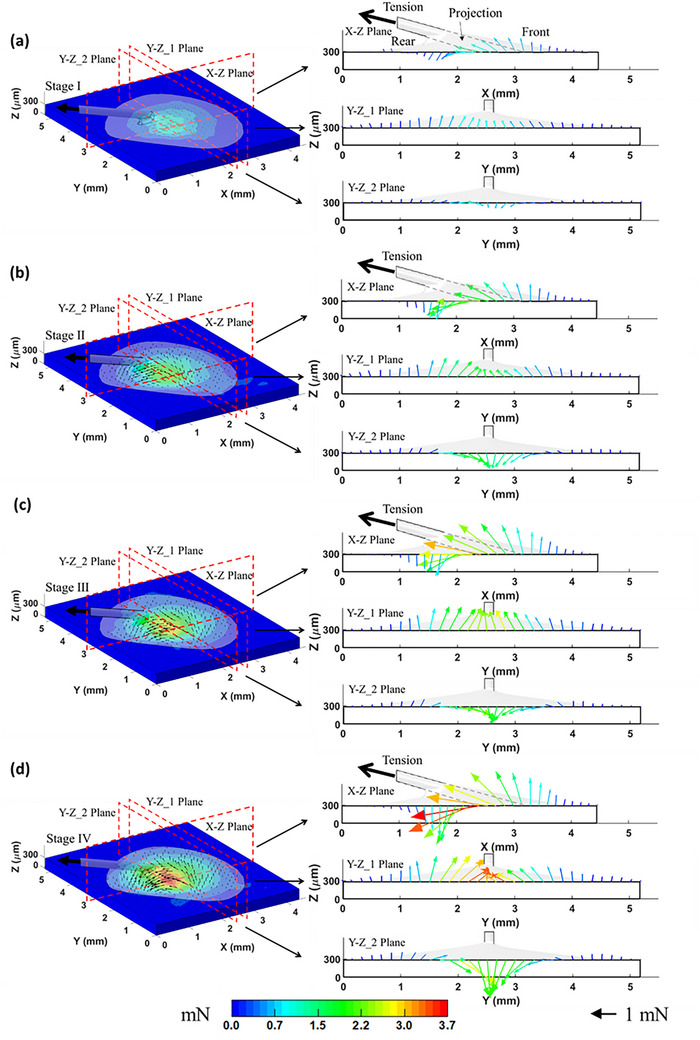 Figure 9
Figure 9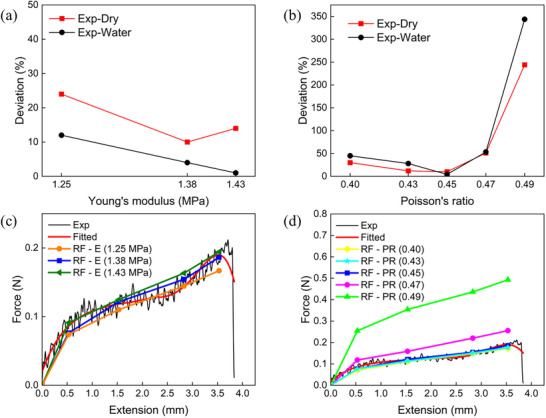 Figure 10
Figure 10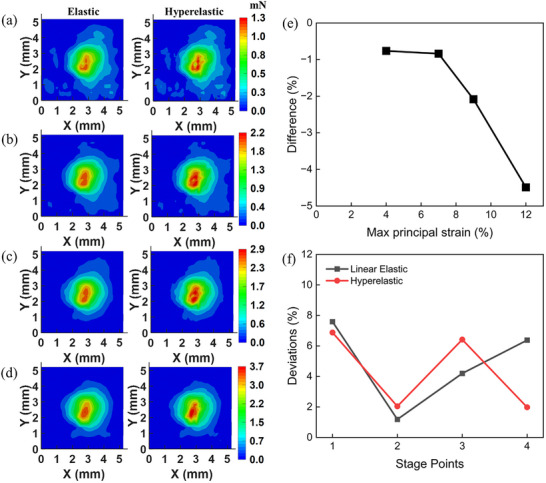 Figure 11
Figure 11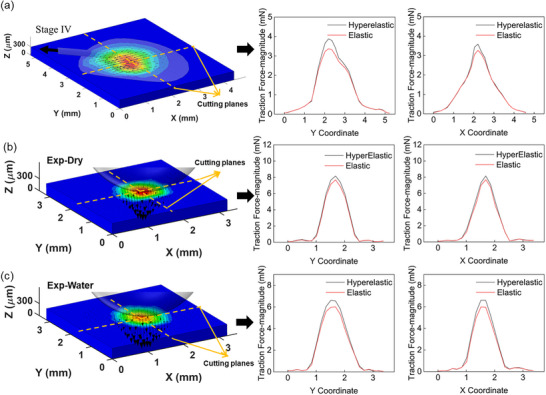 Figure 12
Figure 12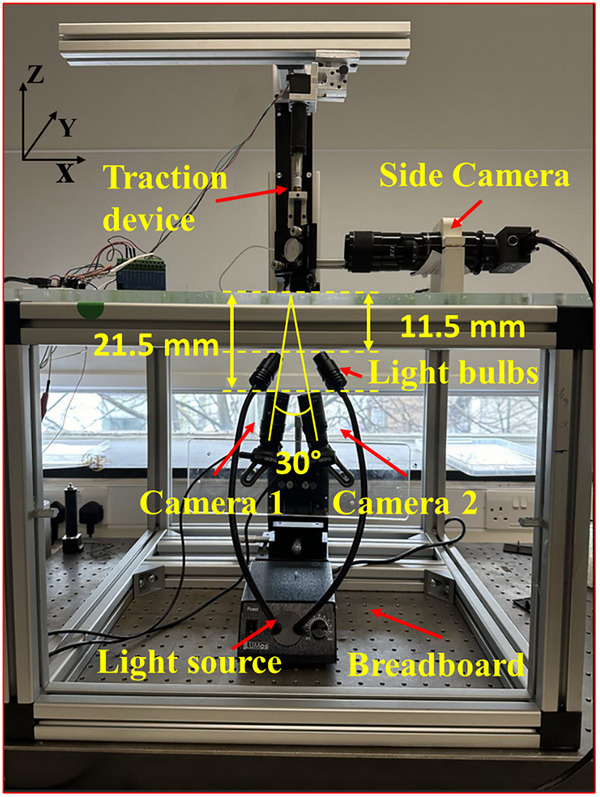 Figure 13
Figure 13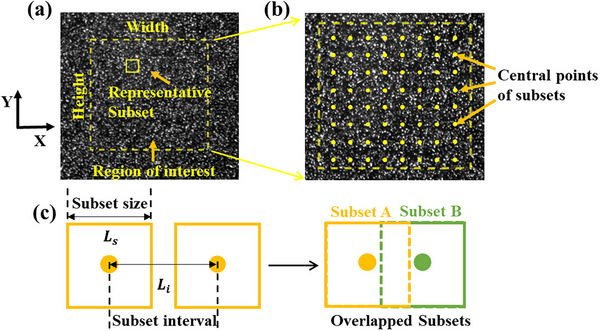 Figure 14
Figure 14| Authors | Scale (resolution) | Imaging & Requirements | Applicability & Limitations |
|---|---|---|---|
| Legant et al.[
|
(Voxel dimensions: 0.19 × 0.19 × 0.5 µm) |
Requires hydrogel with fluorescent beads; Fluorescence labelling |
Limited by phototoxicity and slow z‐stack acquisition; Limited to linear elastic substrate |
| Plotnikov et al.[
|
(Window size: 0.94 × 0.94 µm) |
Requires high‐density; Fluorescent beads |
Restricted to linear elastic substrate |
| Holenstein et al.[
|
(Voxel dimensions: 0.06 × 0.06 ×0.25 µm) |
Optimized bead density and optical flow tracking |
Improves resolution for small focal adhesions; Limited to linear elastic substrate |
| Bergert et al.[
|
|
Fluorescence imaging of beads; printed fiducial arrays |
Require image stacking and reconstruction; Computationally expensive |
| Lee et al.[
|
(Voxel dimensions: 0.18 × 0.18 ×0.18 µm) |
Label‐free (Refractive Index) |
Suitable for capturing rapid dynamics; Require image stacking and reconstruction; Limited to single‐cell FOV |
| Bergert et al.[
|
|
Nanodrop‐printed fiducial arrays; Confocal fluorescence imaging |
Capturing dynamic forces where a reference state is impossible; Computationally expensive |
| The current research |
Pixel size: 15 ×15 um |
Standard cameras with surface speckle/pigment; No fluorescence or microscopy required |
No phototoxicity; Suitable for large samples (unrestricted by microscope FOV); Enable application of external loadings |
| μ1 (MPa) | μ2 (MPa) | α1 | α2 | D | Young's modulus (MPa) | Poisson's Ratio |
|---|---|---|---|---|---|---|
| 4.71E‐04 | 0.47 | 14.79 | 4.84 | 0.44 | 1.38 | 0.45 |
| Stage Point | RF_X [N] | RF_Y [N] | RF_Z [N] | RF [N] | Direction |
|---|---|---|---|---|---|
| 1 | −0.070 | 0.006 | 0.030 | 0.076 | 23° |
| 2 | −0.116 | 0.008 | 0.035 | 0.121 | 17° |
| 3 | −0.145 | 0.009 | 0.052 | 0.154 | 20° |
| 4 | −0.179 | 0.012 | 0.050 | 0.186 | 16° |
| Model | μ1[MPa] | μ2[MPa] | Shear modulus [MPa] | Poisson's ratio | Young's modulus [MPa] |
|---|---|---|---|---|---|
| Upper limit | 4.94E‐04 | 0.494 | 0.494 | 0.45 | 1.43 |
| Average | 4.71E‐04 | 0.475 | 0.475 | 1.38 | |
| Lower limit | 3.89E‐04 | 0.432 | 0.432 | 1.25 |
- —Engineering and Physical Sciences Research Council10.13039/501100000266
- —Leverhulme Trust10.13039/501100000275
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdhesion, Friction, and Surface Interactions · Calcium Carbonate Crystallization and Inhibition · Polymer Surface Interaction Studies
Introduction
1
Traction forces, e.g. cohesive forces and contact forces, play an important role in wide ranges of applications such as adhesives,^[^ 1 ^]^ coatings^[^ 2 ^]^ and medical applications.^[^ 3 ^]^ Understanding the mechanisms of traction forces is crucial for optimizing adhesive material performance by improving energy absoption capacity, ensuring adhesive structure integrity as well as developing novel adhesive materials. In complex systems, understanding force distribution across the interface between two contact surfaces is important for developing durable and efficient load‐bearing structures.
Accurate measurement of force distribution at interfaces is essential to investigate the mechanisms of traction force. Several characterising techniques have been employed to measure traction forces. For example, atomic force microscopy (AFM) is used to measure adhesive forces by detecting forces between a tip and a sample as the tip scans the sample surface.^[^ 4 ^]^ AFM has a high‐resolution at atomic scale, however, its scanning speed is slow to avoid compromising the resolution.^[^ 5 ^]^ Furthermore, fluorescence microscopy (FM) is used to measure traction forces by tracking the behavior of fluorescently labelled molecules or particles near surfaces.^[^ 6 ^]^ FM is subject to photobleaching, where fluorophores irreversibly degrade under prolonged illumination,^[^ 7 ^]^ and phototoxicity caused by reactive oxygen species, which can alter cellular physiology.^[^ 8 ^]^ These effects are particularly problematic in live imaging and therefore make such techniques less suitable for experiments involving living animals or delicate biological interfaces.^[^ 9 ^]^ Traction force microscopy (TFM) is a widely used technique for quantifying forces exerted by cells on the surface of substrates. The traction forces measured at the cell–substrate interface typically represent internal forces exerted by adherent cells.^[^ 10 ^]^ TFM is generally applied to assess cellular deformations at limited spatial scales, ranging from nanometre to submicron scale,^[^ 11, 12, 13 ^]^ and primarily provides a two‐dimentional view of traction forces. As TFM commonly relies on confocal fluorescence microscopy for displacement measurements,^[^ 14, 15, 16 ^]^ it is also subject to the inherent limitations of fluorescence microscopy, including the above‐mentioned photobleaching and phototoxicity.
Recent advancements in multidimensional traction force microscopy have significantly expanded our ability to quantify mechanical transduction in 3D environments, as reviewed by Cheung et al.^[^ 17 ^]^ Pioneering methods utilizing confocal fluorescence microscopy, such as those by Legant et al.^[^ 18 ^]^ and Plotnikov et al.^[^ 19 ^]^ have enabled the mapping of traction forces with sub‐micron resolution, revealing detailed rotational moments and focal adhesion dynamics at the single‐cell level. Subsequent optimizations by Holenstein et al.^[^ 20 ^]^ and Bergert et al.^[^ 21 ^]^ further refined tracking accuracy and extended these capabilities to analyzing adhesion‐independent migration. More recently, Lee et al.^[^ 22 ^]^ introduced Refractive‐Index TFM (RI‐TFM), a label‐free tomographic approach that overcomes the limitations of phototoxicity and slow acquisition speeds inherent to fluorescence‐based scanning.
However, despite their high resolution, these microscopy‐based techniques are fundamentally constrained by the field of view (FOV) and working distance of high‐magnification objectives, as summarised in Table 1 for selected TFM methods. Furthermore, these techniques are predominantly optimized for assessing cellular deformations which typically remain below 2 µm.^[^ 12, 23, 24, 25 ^]^ Such limitations reduce their suitability for characterizing meso‐scale or tissue‐level mechanics, particularly when investigating large, thick samples or applying in situ external loading. To address this gap, we present a novel, stereo‐DIC‐based framework designed for macroscopic interfacial force mapping. Unlike confocal microscopy‐based methods, our approach creates a versatile, phototoxicity‐free platform capable of measuring surface deformations across centimeter‐scale, unrestricted by the spatial constraints of standard microscopy.The comparision of representative TFM methods and the current study is shown in Table 1.
Among the existing TFM approaches, Li et al.^[^ 27 ^]^ presented a light field microscopy‐based technique that enables dynamic imaging of 3D traction forces on polydimethylsiloxane (PDMS) substrates, based on an iterative displacement to stress inversion algorithm. While their method provides reconstruction of 3D traction stresses, the assumption that PDMS substrates behave as linear elastic solids may compromise the accuracy of traction force measurements, particularly in regions of local deformation. Since PDMS is known to exhibit pronounced hyperelastic behavior,^[^ 28, 29 ^]^ accurately modeling its nonlinear mechanical response is essential for reliable force quantification. In addition, the influence of material parameters, such as Young's modulus and Poisson's ratio, on the accuracy of force reconstruction has not yet been systematically investigated. In this work, we address these open questions by integrating experimentally measured displacements into a finite element framework incorporating a hyperelastic substrate model, and by quantifying the influence of substrate properties on interfacial force measurements. This approach offers an experimentally simpler and versatile platform for displacement measurements using transparent layered polymeric substrates. Unlike confocal microscopy‐based methods, which often restrict the dimensions of the sample size due to limited field of view and working distance, this setup accommodates a wider range of sample geometries while maintaining high‐resolution surface deformation tracking. Moreover, it is particularly suited for in situ applications involving external loading, such as adhesion testing under wet conditions, which remains challenging for existing optical or confocal microscopy based 3D traction force measurement techniques.
This paper aims to bridge this gap by providing an in situ technique that enables the real‐time measurement of user‐specific displacements and 3D traction force distributions at an interface. As a demonstration of this technique, the interfacial traction force of marine mussel plaques anchored to wet substrates under directional tension is measured. The technique is applicable to any interfacial interactions for substrates with different stiffness and not limited to adhesion‐detachment related deformation at the interface.
Results and Discussion
2
Experimental Design
2.1
The measurement of 3D displacement field and force distribution at an interface was conducted using an in situ stereo‐digital image correlation (SDIC) method. SDIC is a non‐contact optical technique, and its setup and principle are illustrated in Figure 1. The setup (Figure 1a) consists of a substrate and charge‐coupled device (CCD) cameras. In this study, PDMS made of Sylgard 184 silicone elastomer (The Dow Chemical Company, Michigan, USA) was used to create the deformable substrate for measuring the mechanical responses at the interfaces. PDMS was chosen for this method as it is optically transparent, non‐toxic, and highly deformable.^[^ 30 ^]^
The schematic of the SDIC technique for measuring 3D interfacial force in wet environment: a) the PDMS substrate consists of four layers and is supported on an acrylic panel; b) two cameras with an angle φ underneath the substrate; c) an object under directional tension in water while the two cameras measuring the substrate's deformation at interface; d) importing the measured 3D displacement U(x, y, z) into the finite element (FE) model of the substrate via coordinate mapping and computing 3D reaction force R(x, y, z) at the interface; e) the visualization of the 3D traction force at the interface between the object and substrate.
Four PDMS layers were spin‐coated sequentially on an acrylic substrate. The four layers from the bottom to top were two layers pure PDMS, a particle layer and a pigment layer, shown in Figure 2a. The first two layers made of pure PDMS were used as a deformable substrate. The third PDMS layer contained randomly distributed particles (ZnS:Cu^[^ 31 ^]^) forming a speckle pattern with particle sizes of 3.0 ± 1.2 pixels (45 ± 18 µm) and areal coverage between 20% and 40%, making it suitable for digital image correlation (DIC) measurement.^[^ 32, 33 ^]^ The black pigment layer as the fourth layer was used to alleviate the scattering light by water at the wet interface and increase the contrast of the white micro particles relative to surrounding PDMS. The third and fourth layers collaborated to form a uniform, high‐contrast, and randomly distributed speckle pattern on the top surface of the PDMS substrate (Figure 2b). The overall thickness of the four PDMS substrate was 0.3 mm. The PDMS substrate preparation and spin coating process were detailed in S.1 (Supporting Information).
a) The optical microscope image of the PDMS substrate cross‐section, which consists of four layers from bottom to top: two layers pure PDMS, a particle layer and a pigment layer; b) an image taken from a CCD camera showing speckle patterns consisting of randomly distributed particles and surrounding PDMS. c) the FE model of the PDMS substrate using commercial FE solver Abaqus/standard. d) The stress‐strain curve of the PDMS substrate obtained by uniaxial tensile test and curve fitting using Ogden model.
Two synchronized cameras (Figure 1b) were employed to capture images of the substrate from two different viewpoints, forming a stereo pair. The stereo images were analysed using DIC algorithms embedded in a processing software (DICe,^[^ 34 ^]^ an open‐source software tool developed by Sandia National Laboratories for performing DIC to identify matching points on the speckle pattern across the stereo pair. The 3D spatial position of a point was determined through triangulation^[^ 35 ^]^ which relied on the intersection of rays from the cameras. This approach utilized camera parameters (e.g., focal length, location) and the pixel coordinates of the corresponding point in both images, obtained by a prior calibration process.^[^ 36 ^]^
Using the reconstructed 3D speckle pattern, DICe software calculates 3D displacement vectors by tracking the relative movement of points between the initial (undeformed) and deformed configurations, caused by interactions at the interface (e.g., mussel plaques attached to a substrate, as shown in Figure 1c). The measured displacements include components along the X and Y axes, representing in‐plane directions, and the Z axis, representing the out‐of‐plane direction.
The displacement vectors at each point across the interface were mapped onto the nodes of the FE model (ABAQUS/Standard) of the PDMS substrate as displacement boundary conditions (Figure 1d). To ensure accurate boundary condition application, the finite element mesh was constructed directly based on the DIC analysis grid. Specifically, the spatial coordinates of the FE nodes were defined to coincide exactly with the central points of the DIC subsets. This establishes a one‐to‐one mapping between the experimental measurements and numerical models, i.e., no interpolation is required during the mapping. Consequently, the 3D displacement vectors (X, Y, and Z components) measured at each DIC subset centre were directly assigned as displacement boundary conditions to the corresponding FE node. The FE model was assigned the same thickness as the substrate used in the experiment. The PDMS substrate was modelled using reduced hybrid 3D 8‐node elements (C3D8RH in ABAQUS notation), shown in Figure 2c. The nodes at the bottom surface were constrained to prevent any translation or rotation movement. The mesh density of the FE model was approximately 475 elements/mm^3^, which is consistent with experimental DIC mesh resolution. A mesh density study confirmed that the results had converged: no significant changes upon further mesh refinement, demonstrating that the selected mesh was sufficient for accurate and reliable analysis.
The PDMS exhibits a nonlinear hyperelastic behavior which was modelled using the compressible Ogden model^[^ 37 ^]^ in this study, as detailed below:
where W is strain energy density; λ_1_,λ_2_,λ_3_ are the principal stretch ratios (eigenvalues of the deformation gradient); μ_ p _ and α_ p _ are material constants with the initial shear modulus calculated as ∑p=1Nμp; N the order of energy potential; J the volume ratio, J = λ_1_λ_2_λ_3_; D the material incompressibility parameter which can be related to initial bulk modulus K = 2/D. It was found that the Ogden model best fit to the uniaxial test data (ASTM‐D412^[^ 38 ^]^) of pure PDMS when N = 2, shown in Figure 2d. Table 2 summarizes the material constants used in the Ogden model. It is worth mentioning that uniaxial test (ASTM D882^[^ 39 ^]^) was also conducted on the PDMS containing particles and pigment, which was cut directly from the substrate. ASTM D412 was used for pure PDMS as an elastomer with large‐strain behavior (>100%), while ASTM D882 was more suitable for the particle‐filled PDMS as a thin film with lower strain (≈25%), close to the strain ranges used in this study. The results indicated that addition of particles and pigment had a negligible impact on the mechanical behavior, as the stress‐strain curve is almost identical to that of pure PDMS, see S.2 (Supporting Information).
The Poisson's ratio of the PDMS substrate was experimentally measured using DIC‐based uniaxial tensile testing on thin films directly cut from the same formulation used in this study, yielding a value of ν = 0.45 ± 0.03, consistent with literature values for cross‐linked PDMS of similar composition.^[^ 40, 41, 42 ^]^ The detailed procedures and results are provided in S3 (Supporting Information).
To verify if the speckle treatment biased adhesion measurements, control experiments were conducted on pristine and speckled PDMS substrates. Contact angle measurements showed no significant difference between the two surfaces (109.2° ± 4.7° versus 110.2° ± 6.1°), indicating that the addition of ZnS:Cu particles and black pigments did not alter the surface energy. Adhesion performance was evaluated using a standard ASTM D903 peeling test with a commercial bonding tape to ensure reproducibility. The speckled PDMS exhibited a slightly higher peeling energy, which may result from enhanced microscale mechanical interlocking due to the particles modifying the microscale topography (see S.4, Supporting Information). These results indicate that while surface chemistry remains consistent, the topographical changes induced by the speckle pattern can influence mechanical adhesion. Therefore, further optimization of particle density and size is required to mitigate the mechanical effects of particulate additives on adhesion in future applications.
Based on the FE model of the PDMS substrate, reaction forces (nodal forces) at the top surface of the substrate were computed in ABAQUS/Standard. As an example, the method was applied to measure and visualize the 3D reaction force at the interface between a mussel plaque and the PDMS substrate (Figure 1e).
Design of the Substrate
2.2
The material selection and thickness of the substrate's deformable layers are crucial for measurement accuracy. This study introduces a quantitative model to determine the suitable substrate material and thickness, based on the Winkler Spring model that treats the substrate as an isotropic elastic‐foundation composed of independent vertical springs, as shown in Figure 3a.
Schematics of a) the Winkler Spring model under vertical contact stress σ, and b) the deformed configuration of the substrate under shear traction t.
The elastic stiffness of a Winkler foundation k can be related to the vertical contact stress σ and the local vertical deformation *δ_z_
- via
The value of elastic stiffness k can also be related to Young's modulus E and thickness h of the substrate,^[^ 43 ^]^ i.e.,
The classical Winkler foundation model assumes that the substrate reacts locally to the applied load, neglecting the lateral coupling between adjacent points. This simplification neglects lateral constraint and Poisson coupling, leading to discrepancies for finite‐thickness elastic layers. Based on the Timoshenko solution,^[^ 44 ^]^ the stiffness of a finite‐thickness layer, *k_T_
- can be written as
where ν denotes Poisson's ratio. To evaluate this approximation under the experimental conditions of this study, FE simulations were performed using a 3D elastic substrate (E = 1.7 MPa, ν = 0.3–0.45, h = 0.3 mm) and subjected to uniform z‐direction pressure. The effective stiffness obtained from simulation, *k_FE_
- = σ/δ_ z _ , was compared with the analytical expression Equation (4), and a modifying parameter α(v) was defined as:
Polynomial fitting of α(v) yielded a correlation R^2^ = 1.0, confirming that the modified Winkler model reproduces the FE‐derived stiffness precisely across the investigated Poisson‐ratio range (see S4, Supporting Information).
By combining α(v) with the Poisson‐dependent term from the analytical model *k_T_ *, a unified coefficient θ(v)=1a(v)×(1−v2) was defined, giving the modified Winkler foundation model expression:
This modified form consolidates the effects of lateral constraint and Poisson coupling into a single function of ν, providing an accurate and simple representation of the finite‐thickness elastic response validated by the FE simulations as detailed in S5 (Supporting Information).
From Equations (2) and (6), the ratio (*ψ_z_ *) of noise (*η_z_ *) to measured deformation (*δ_z_ *) in vertical direction (Z direction) can be related to Young's modulus E and thickness h of the substrate, i.e.,
where η_z_ denotes the measurement noise in Z direction.
Consider a shear traction (t) that is applied parallelly on the top surface and causes deformation *δ_x_
- along the X‐axis (see Figure 3b), the ratio of the noise (*η_x_ *) to measured deformation *ψ_x_
- can be calculated as
where G denotes the shear modulus. Equations (7) and (8) can be combined to describe the general noise to measurement ratio (ψ) in three directions (X‐Y‐Z) as below:
Assuming the in‐plane deformation along the Y‐axis (*δ_y_ *) is equal to *δ_x_ *, and η_ max _ = max(η_ x , η y , η z _), Equation (9) can be written as follows:
Equation (10) suggests that the value of ψ can be reduced by using a soft substrate (low Young's modulus E) and increasing the thickness h of the substrate's deformable layers. It is noted that there is a practical limitation on choosing the value of h as excessively thick substrate layers can significantly reduce image contrast and resolution due to light scattering^[^ 45 ^]^ and refraction.^[^ 46 ^]^
In this study, as the noise was up to 1.2 µm in our measurement system after applying a filtering approach (See S.6, Supporting Information), the PDMS with Young's modulus of 1.4 – 1.7 MPa^[^ 47, 48, 49 ^]^ and Poisson's ratio of 0.45 was selected to fabricate the substrate at total thickness 300 µm (Figure 2a). For a typical contact stress greater than 0.05 MPa applied on the top surface of the substrate, the ratio of noise to measured deformation ψ is less than 10%.
Validation: A steel Ball Supported on a PDMS Substrate
2.3
To evaluate the accuracy of the proposed method, the 3D displacements of the PDMS substrate caused by the self‐weight of a 20.6 g solid steel ball that rested on the top of the PDMS (see Figure 4a), were simulated and compared with experimental measurements. The steel ball was selected because it exerted a gravitational force of 0.202 N, which is comparable to the maximum tensile load exerted by marine mussel plaques, discussed in the following Section. This provides a realistic case study aligned with the intended application. To assess the method's performance in a wet environment, the same setup was tested with the ball fully immersed in water. In this case, the net force was reduced to 0.176 N due to an upward buoyant force of ≈0.026 N.
A PDMS substrate under the self‐weight of a 20.6 g steel ball: a) the experimental setup, b) the FE model, c) the FE predictions and the SDIC measurements of the displacements in c) X direction, d) Y direction, e) Z direction, as well as f) displacement magnitude.
Finite element simulations were performed using ABAQUS/Standard. The steel ball, with a diameter of 17 mm, and the PDMS substrate, with dimensions of 80 × 80 × 0.3 mm^3^, were modeled to reflect the experimental setup, as shown in Figure 4b. The PDMS substrate was discretized using 8‐node brick elements with reduced integration and hybrid formulation, i.e., C3D8RH element in ABAQUS notation. The elements are suitable to model incompressible or nearly incompressible solids. The steel ball was discretized using 8‐node brick elements with reduced integration (C3D8R) and modelled as a rigid body by applying constraint equations. A concentrated force was applied at the reference point (RP), located at the center of the ball, in the negative direction along Z‐axis, to simulate the indentation load applied to the substrate in the experiment. The bottom surface of the PDMS substrate was fully fixed to replicate the experimental boundary conditions. The contact between the ball and the substrate under dry condition was defined using a surface‐to‐surface interaction with tangential behavior governed by the penalty formulation, applying a friction coefficient of 1.7.^[^ 50 ^]^ Normal behavior was modelled using penalty contact. The interaction between the ball and the PDMS substrate under water was modelled using a general contact formulation with a frictionless condition, as the ball–PDMS interface immersed in water experiences negligible friction due to the lubricating effect of the interfacial water layer, which may prevent direct solid–solid contact.The effect of friction between the ball and the substrate is discussed in S.5 (Supporting Information). For simplicity, the cohesion between the ball and the substrate was ignored.
The deformations on the top surface of the PDMS substrate are shown in Figure 4c–f, along with comparison between FE predictions and experimental measurement. The labels ‘FEA‐Dry’ and ‘FEA‐Water’ refer to FE predictions under dry and aqueous conditions, respectively, while ‘Exp‐Dry’ and ‘Exp‐Water’ correspond to experimental measurement under the same conditions. Both the simulated and measured results exhibited a radially symmetric displacement field, attributed to the spherical contact geometry. Initial deformation began at the point of contact and propagated radially with increasing indentation depth, reaching a maximum deformation at the centre. The diameters of the circular deformation patterns remained consistent across both dry and wet conditions. The measured diameter under dry condition (≈3.8 mm) were approximately 5% smaller than that obtained by the FE prediction (≈4.0 mm) (See S.8, Supporting Information). This discrepancy may be attributed to (1) the characteristics of SDIC measurement, which tracks the average displacement of subsets consisting of multiple particles. As a result, the deformation boundary captured by SDIC may not be accurately estimated, especially near the transition zones where displacements gradually diminish rather than sharply drop to zero; and (2) the cohesion between the ball and the substrate, which was not modelled in the FE predictions.
The measured displacement fields in the X, Y, and Z directions also agree well with those obtained by FE predictions. All the samples exhibited symmetric displacements in the X and Y directions, with peak values of ≈±4.8 µm (FEA‐Dry) and ±5.1 µm (Exp‐Dry) – the negative values refer to displacements along the negative directions of the respective axes. The peak displacements in X and Y direction of FEA‐Water and Exp‐Water are ±8.2 µm and ±9.0 µm, respectively. The maximum X‐Y displacements under the wet condition are relatively greater than those under the dry condition, which can be attributed to the reduced friction effect in the presence of water. The peak displacement in the Z direction is almost identical to the overall magnitude of displacement, as the substrate deformation was dominated by the vertical load from ball indentation. The results in FEA‐Dry and Exp‐Dry show peak displacements of 25.5 and 28.0 µm in the Z direction, respectively, with a discrepancy of less than 9.8%. For the wet condition, the results in FEA‐Water and Exp‐Water show peak displacements of 24.5 and 23.7 µm, respectively, with a discrepancy of less than 3.4%.
Figure 5 presents the distribution of the traction forces (i.e., contact forces) exerted by the steel ball on the top surface of the PDMS substrate, calculated as the nodal forces on the top surface of the FE model of the substrate based on the displacement fields obtained by the FE predictions (i.e., FEA‐Dry and FEA‐Water), and the SDIC measurements (i.e., Exp‐Dry and Exp‐Water), respectively. The traction forces between the steel ball and the PDMS substrate are compressive with the peak compressive force occurring at the center of the contact zone, directly beneath the ball, and decreasing radially toward the periphery. This distribution aligns with the displacement field and reflects the spherical geometry of the indenter. The traction force distributions from FEA‐Dry and FEA‐Water agree well with those from Exp‐Dry and Exp‐Water, respectively. The measurements (Figure 5b) indicate that the circular area over which the traction forces are distributed has a diameter of ≈1.55 mm, which is 14.0% larger than the FE prediction of 1.36 mm (Figure 5a). The difference between experimental and FE prediction under wet condition is 10.5%. The peak traction forces are 7.5 mN for FEA‐Dry and 6.9 mN for FEA‐water, compared to 7.6 mN for Exp‐Dry and 6.6 mN for Exp‐Water. The resultant traction (contact) forces at the interface, calculated for the Exp‐Dry and Exp‐Water conditions, are 0.222 N and 0.168 N, respectively—both within 9.9% of the corresponding applied forces (i.e., 0.202 N and 0.176 N). Since the resultant contact forces are derived from element‐level stress data, the discrepancy between the predicted and measured forces is close to that observed for displacements (up to 9.8%). Furthermore, for the Exp‐Dry condition, the higher mesh densities of 950 and 1900 elements/mm^3^ were also employed, with the resultant and peak values of the traction forces remaining consistent at 0.184 N and 7.7 mN, respectively, thereby confirming mesh independence. A comprehensive comparison between the experimental measurements and FE simulations is presented in S.8 (Supporting Information).
The contact forces exerted by the steel ball on the top surface of the PDMS substrate, calculated based on the displacement fields obtained by the FE predictions, a) FEA‐Dry and c) FEA‐Water; and the SDIC measurements, b) Exp‐Dry and d) Exp‐Water, respectively.
Measurement of the Traction Forces at Wet Adhesion Between a Mussel Plaque and a PDMS Substrate
2.4
Figure 6 illustrates the definitions of key quantities relevant to the test, including the global coordinate system and strains. The global coordinate system (X–Y–Z) is defined such that the X‐axis aligns with the projection of the thread onto the substrate surface, the Z‐axis is oriented perpendicular to the substrate (normal direction), and the Y‐axis is determined accordingly using the right‐hand rule. The total strain of the thread–plaque system is defined as the combined elongation of thread (Δ*L_t_ ) and plaque (ΔL_p_ *) relative to their initial lengths (thread: *L_t_
- = 4.6 mm; plaque: *L_p_
- = 267 µm) along the pulling direction, i.e., (Δ*L_t_
-
- Δ*L_p_ *)/(*L_t_
-
- *L_p_ ) . The strains of the thread and the plaque are defined as ΔL_t_ */*L_t_
- and Δ*L_p_ */*L_p_ *, respectively.
Schematic illustration of the tension test on a mussel thread‐plaque system attached to a substrate.
Figure 7a presents the force–extension curves of the mussel thread–plaque system under 15° tension measured by the load cell linking to the thread, including both the raw experimental data (Exp) and the corresponding smoothed curve (Fitted). The curve was smoothed using the Savitzky–Golay filter with a window size of 1501 points and a polynomial order of 3 using the OriginPro software. The resultant traction force (RF) exerted by the mussel plaque on the top surface of the PDMS substrate was calculated as the sum of the traction forces at the interface. This was determined using the FE model of the substrate based on the displacement fields obtained by the SDIC measurement, shown in Figure 7a for comparison.
a) The measured force‐extension curve of the mussel thread‐plaque system under 15° tension (Exp and Fitted). The resultant traction forces (RFs) at the interface are shown in comparison; b) The side views of the mussel plaque corresponding to the four stage points.
Four distinct mechanical response stages are identified: linear elastic (Stage I), plateau (Stage II), hardening (Stage III), and failure (Stage IV). In Stage I, the tensile force increases linearly with extension from 0 to 0.8 mm, reaching ≈0.10 N. Stage II is characterized by a rapid increase in extension (0.8–2.4 mm) with only a slight increase in force (from 0.10 to 0.12 N), indicating a plateau response. This is followed by Stage III, where the system exhibits strain hardening: the force rises to 0.18 N as the extension continues to increase up to 3.3 mm. In the final stage (Stage IV), the tensile force reaches a peak of 0.20 N at an extension of 3.5 mm, followed by a sudden drop, indicating catastrophic failure due to plaque detachment from the substrate. The tensile response of the mussel thread–plaque system reveals complex, multi‐stage behavior reflecting intricate interactions within the plaque and at its interface. The deformation at selected tensile loads (see Figure 7b) before failure suggests adaptive interfacial mechanisms that delay detachment. To better understand these effects, exploring the interfacial traction forces at each stage of deformation is essential.
Four representative points were selected along the stress–strain curve: the Stage Point I captures the linear elastic response; the Stage Point II marks the onset of inelastic deformation; the Stage Point III reflects the strain hardening behavior; and the Stage Point IV corresponds to the initiation of failure or material softening. The resultant traction forces of Stage Points I–IV were ≈0.08, 0.12, 0.15, and 0.19 N, respectively. These values closely align with the fitted force–extension curve of the mussel's tension test, indicating efficient force transmission from the thread–plaque system to the plaque–substrate interface. It is noted that the tensile force measured by the load cell is not necessarily equal to the resultant traction force imposed on the top surface of the PDMS substrate, as there might be suction force caused by volume change of the plaque.^[^ 51 ^]^
The components of resultant traction forces in the X, Y, and Z directions (RF_X, RF_Y, and RF_Z) are summarized in Table 3. The negative sign of RF_X indicates that the force acts along the negative X‐axis. The RF_Y values remained close to zero, indicating negligible reaction forces in the Y direction. This observation is consistent with the loading direction, which projected predominantly along the X‐axis. The values of RF_X are significantly higher than both RF_Y and RF_Z, suggesting that shear interfacial stress along the X‐axis is the dominant mode of interfacial loading. The directions of the resultant traction force vectors were calculated to range between 16° and 23°, demonstrating good alignment with the applied tensile load direction of 15°. The minor discrepancy is likely due to slight deviations in the experimental setup, particularly in maintaining precise control over the loading angle.
The SDIC measured 3D displacement distribution at the plaque–substrate interface for each stage is shown in Figure 8a–d. The high‐magnitude displacement was primarily concentrated in the left‐front region of the plaque, aligning with the projected area of the thread on the substrate. The maximum displacements for Stage Points I–IV are approximately 18, 30, 38, and 47 µm, respectively. Across all loading stages, the displacement component in the Y‐direction displays a symmetric pattern. The X‐direction displacement dominates the deformation behavior, while displacement in the Z‐direction remains minimal—limited to ≈3 µm. The directions of the overall displacements, indicated by black arrows on the substrate, are predominantly along the negative X‐axis and slightly lower than the applied 15° tensile direction. This alignment suggests that shear deformation dominates at the interface. Consequently, the plaque's deformation under 15° tension is governed mainly by interfacial shear rather than normal separation.
a–d) The displacements of the substrate at the interface at the four Stage Points of 15° tension.
Based on SDIC measured displacement field on the top surface of the PDMS substrate, the distributions of nodal forces on the top surface, exerted by the mussel plaque through the interface, are shown in Figure 9a–d for both 3D view and sectional views at the four Stages Points. Traction force vectors are shown as arrows originating from interface nodes and pointing outward, indicating the directions of the traction forces. The arrow colors represent the force magnitudes in the 3D space, following a continuous color scale. A cross‐sectional view in the X–Z plane is taken along the central axis of the thread.
a–d) The nodal forces on the top surface of the substrate at the four Stage Points of the 15° tensile test.
As shown in the 3D and X–Z cross‐sectional views, the distribution of traction forces across the substrate surface demonstrates a clear transition from tensile loading in the anterior region (X > 3 mm) to compressive loading in the posterior region (X < 2 mm), with an intermediate transition zone corresponding to the thread‐projected area (2 mm ≤ X ≤ 3 mm). To elucidate the spatial variation of traction forces within this transition region, two Y–Z plane cross sections—positioned near the front (Y–Z_1) and rear (Y–Z_2) of the plaque—are presented in Figure 9. The data indicate that the transition zone extends approximately across 1.6 mm ≤ Y ≤ 3.5 mm. In these sections, the arrow lengths denote the magnitudes of the force components projected onto the respective planes. The analysis reveals that the horizontal component of the applied tensile load is predominantly transmitted to the substrate through the transition zone, whereas the vertical component is primarily transmitted via the anterior region of the interface. Furthermore, the tensile loading induces a bending moment on the interface, which contributes to the simultaneous occurrence of tensile and compressive traction forces within distinct regions of the substrate. These observations highlight the complex nature of force transmission at the plaque–substrate interface, which is crucial for understanding interfacial stability. The biological conclusions regarding mussel adhesion presented here are preliminary, as the mussel plaque adhesion test was intended primarily to demonstrate the applicability of the proposed measurement framework. The ongoing research work^[^ 51 ^]^ focuses on systematic testing with n ≥ 5–10 biological replicates to ensure statistical robustness and to further elucidate the mechanisms of plaque adhesion under different loading modes.
Effects of the Material Properties of the PDMS Substrate on Measurement Accuracy
2.5
This section investigates the sensitivity of SDIC measurements to the mechanical properties of the substrate. Specifically, the effects of Young's modulus (E) and Poisson's ratio (ν), within their experimentally determined ranges, are systematically evaluated. While substrates in many prior SDIC studies have been modelled as linear elastic solids for traction force computation at the cell–substrate interface, this study adopts the Ogden hyperelastic model to more accurately capture the nonlinear mechanical behaviors of the substrate. This consideration is particularly relevant in the context of mussel plaque–substrate interactions, where elevated traction forces may induce substantial local deformation modes. The influence of the substrate's constitutive model on the accuracy of traction force estimation is critically examined in the analysis that follows.
Effect of Young's Modulus
2.5.1
Table 4 summarizes the upper bound, average, and lower bound of Young's modulus obtained from data fitting of the experimental tensile data across five PDMS samples produced in a single batch (S.2, Supporting Information). These correspond to Young's modulus values of 1.43 MPa, 1.38 MPa, and 1.25 MPa, respectively. It is noted that the mean value (1.38 MPa) was employed in the studies reported in Sections 2.3 and 2.4.
Sensitivity study has been conducted for experimental studies reported in Sections 2.3 and 2.4. Figure 10a shows the deviations between the SDIC measured resultant traction forces (RFs) on the top surface of the PDMS at the interface, using these Young's modulus values, and the applied force (AF) from the self‐weight of the steel ball studied in Section 2.3, i.e., 0.202 N for dry condition and 0.176 N for wet condition. The deviation is calculated as |RF − AF|/AF × 100%. The findings indicate a moderate sensitivity of the traction force measurements to the substrate stiffness, with deviation values ranging from ≈1% to 23%. Figure 10c shows the comparison between the SDIC measured RFs and the measured tensile forces (Exp) applied on the thread across all four loading stages as reported in Section 2.4. The SDIC results were not highly sensitive to variations in Young's modulus: the curves generated using the upper, average, and lower bound modulus values closely matched the experimental tensile data, indicating the robustness of the SDIC method in capturing interfacial force response across a realistic range of material stiffness.
Sensitivity analysis of the PDMS substrate material parameters: a) and b) the effects of Young's modulus (E) and Poisson's ratio (PR) to the deviation between the SDIC‐measured resultant traction forces (RFs) and the applied force (AF) due to the self‐weight of the steel ball (Section 3); c) and d) the effects of Young's modulus and Poisson's ratio to the SDIC‐measured RF in the mussel thread–plaque system under 15° tension (Section 4).
Effect of Poisson's ratios
2.5.2
As a hyperelastic material, PDMS poses challenges in accurately determining its Poisson's ratio, which can vary depending on factors such as the curing process,^[^ 41 ^]^ porosity,^[^ 52 ^]^ strain rate,^[^ 53 ^]^ and sample thickness.^[^ 54 ^]^ Consequently, a definitive value is not consistently reported in the literature, with typical values ranging from 0.40 to 0.49.^[^ 40, 41, 42 ^]^ Figure 10b,d presents the effect of Poisson's ratio on the SDIC measurements in the current study. In both cases, the resultant traction forces at the interfaces were calculated using Poisson's ratio ν = 0.40, 0.43, 0.45, 0.47, and 0.49, respectively, while maintaining Young's modulus E = 1.38 MPa. Poisson's ratio was found to have a substantial impact on the accuracy of SDIC measurements. For Poisson's ratio ν = 0.45, the deviations in resultant traction forces under dry and wet conditions are 9.9% and 4.3%, respectively, relative to the applied force from the self‐weight of the steel ball (Figure 10b). The deviations can increase up to 50% or up to 343.7% when the value of Poisson's ratio decreases to 0.40 or increases to 0.49. For the mussel plaque‐substrate interaction measurement, the resultant traction forces calculated using ν = 0.45 showed the closest agreement with the tensile force applied on the thread, with deviations of less than 10% across all the four tension stages. In contrast, the deviations increase to up to 52% or 201% if Poisson's ratios ν = 0.47 or ν = 0.49 are employed in the SDIC calculations. Furthermore, it was found that the direction of the resultant traction force was also significantly influenced by the choice of Poisson's ratio: at ν = 0.45, the angle was calculated as 19° ± 4°, closely aligned with the applied tensile direction of 15°; in contrast, the angles were 46° ± 3° and 69° ± 1° at ν = 0.47 and ν = 0.49, respectively. These sensitivity studies indicate that Poisson's ratio of 0.45 is the most suitable choice for the current study.
The sensitivity analysis of material parameters presented in this section underscores the critical importance of implementing a robust calibration procedure to accurately characterize the mechanical properties of the substrate prior to SDIC measurements. Such calibration is essential to minimize errors and ensure the reliability of the experimental results.
Effect of the Constitutive Model
2.5.3
The constitutive behavior of the PDMS substrate was modelled using the second‐order Ogden hyperelastic model, as described in Equation (1). To evaluate the influence of the constitutive model on the measurement of reaction forces, the substrate was also modelled using a linear elastic model. The elastic modulus was set to 1.38 MPa, consistent with the value obtained from fitting the second‐order Ogden model. A Poisson's ratio of 0.45 was adopted, as it provides the most accurate results, as discussed previously. The finite element mesh consisted of reduced integration 8‐node solid elements (C3D8R in ABAQUS notation), with mesh density kept consistent with that used in the hyperelastic model described in Section 2.1
Based on the measured displacement fields of the mussel plaque's tension of Stage Points I–IV, the traction forces calculated using the two constitutive models are presented in Figure 11a–d. The results show that the traction forces calculated via the linear elastic model were consistently lower than those obtained from the Ogden hyperelastic model across the entire interface, with the peak values from the linear elastic model being 8 – 12% lower than those from the hyperelastic model across all the stage points. Figure 11e presents the relative difference between the resultant traction forces calculated using linear elastic model (*RF_e_ *), and the hyperelastic model (*RF_h_ *), defined as (*RF_e_
- − *RF_h_ *)/*RF_h_ * × 100%, as a function of the peak values of the maximum principal strain of the substrate at the four Stage Points. The results show that the difference grows in magnitude from ≈ ‐1% to ‐5% as strain increases, indicating that the linear elastic model may increasingly underestimate interfacial traction forces as the substrate experiences greater deformation. This trend is consistent with the hyperelastic behavior of PDMS, which exhibits non‐linear elastic deformation. As strain increases, the effective stiffness of PDMS increases, a characteristic captured by the hyperelastic model but neglected by the linear elastic approximation, leading to greater underestimation of interfacial traction forces in high‐strain conditions when using the linear elastic model.
The comparison of traction force distribution calculated using linear elastic and hyperelastic models at Stage Points a) I, b) II, c) III and d) IV; e) The difference between the resultant traction forces (RFs) calculated via linear elastic and hyperelastic models as a function of the peak values of max principal strain; f) the deviations between the resultant traction forces (RFs) and the applied tension forces at the four stage points.
Although the linear elastic model underestimates the interfacial traction forces compared to the hyperelastic model, the deviations relative to the applied tension forces remain below 8%, comparable to those obtained using the hyperelastic model, as shown in Figure 11f. The similarity in deviations suggests that both models may be suitable for small‐strain conditions, where the maximum principal strain does not exceed 12%.
However, a critical distinction arises when examining the spatial distribution of the traction forces. To investigate this, the local traction force magnitudes calculated by the two models, i.e., F_hyperelastic_ and F_elastic_, were compared along the central axes of the mussel plaque interface (Stage IV). Figure 12a plots the force magnitudes derived from both models using the same displacement fields. The plots clearly show that the traction forces of the two models are different. A quantitative calculation of the deviation, defined as (F_hyperelastic_ – F_elastic_) / F_elastic_, reveals significant discrepancies. Along the central X‐axis, the deviation ranged from ‐8.6% to 37.2%; while along the central Y‐axis, it ranged from ‐6.3% to 15.1%. These significant local deviatons indicate that while the Linear Elastic model approximates the total force reasonably well, it distorts the stress distribution profile, particularly in regions of complex deformation geometry.
Comparison of traction force magnitudes calculated using hyperelastic versus linear elastic models for a) mussel plaque tension at Stage IV: Cut views at central axes; Steel Ball experiment under Dry condition: b) Cut views at central axes (c) Wet condition: Cut views at central axes.
To validate this observation in a geometrically controlled system, a similar comparative analysis was performed using the steel ball indentation data. The identical DIC‐measured displacement fields were applied to both the Linear Elastic and Hyperelastic FE models. The resulting traction force magnitudes are plotted in Figure 12b,c, confirming the discrepancy between thes models. For the dry condition (Figure 12b), the local deviation defined as (F_hyperelastic_ – F_elastic_) / F_elastic_, varied significantly across the contact zone. Along the central Y‐axis, the deviation calculated from the profiles ranged from ‐9.0% to 16.9%, while along the central X‐axis, it ranged from ‐20.7% to 25.0%. For the wet condition (Figure 12c), the discrepancies were further amplified. Deviations along the Y‐axis ranged from ‐39.9% to 23.0%, and along the X‐axis from ‐10.3% to 29.5%.
These results, combined with the theoretical validation provided in S.9 (Supporting Information), confirm that the linear elastic approximation introduces spatially non‐uniform errors that can exceed 30% locally. By failing to account for the stiffening and large‐deformation characteristics of PDMS, the linear model compromises the spatial accuracy of the force map. Consequently, the employment of the hyperelastic model is essential for the precise quantification of 3D interfacial traction force distributions in soft bio‐adhesive systems.
Conclusion
3
This study introduces a robust and versatile traction force microscopy framework for quantifying 3D interfacial traction forces during bio‐adhesion events. This technique enables precise 3D quantification of microscale displacements and force distributions at interfaces under both dry and wet conditions. It overcomes the limitations of existing techniques such as atomic force microscopy, fluorescence microscopy, and traction force microscopy, which are often constrained by limited measurement scales and restricted fields of view. Moreover, these methods typically require direct mechanical contact or the embedding of fluorescent beads, both of which can disturb delicate interfaces or influence their inherent mechanical behavior. Key findings and contributions include:
- A theoretical model was developed to determine the optimal thickness of the deformable substrate in the SDIC system, accounting for measurement noise in both normal and shear deformation modes. Based on the model predictions, a PDMS substrate with tailored mechanical properties—specifically, a Young's modulus in the range of 1.4–1.7 MPa and a thickness of 300 µm—was employed in the present study. This configuration was selected to minimise the noise‐to‐signal ratio (maintained below 10%) while preserving the optical transparency required for accurate displacement tracking.
- The SDIC system was calibrated and validated using a steel ball compression test, which may serve as a standardized procedure for future SDIC applications. In the current study, the experimentally measured 3D displacement fields agreed well with FE simulations, with deviations of less than 6.5% under dry conditions and 3.4% under wet conditions. Furthermore, the resultant traction forces derived from SDIC measurements deviated by 8.8% and 4.3% from the applied force (i.e., the self‐weight of the steel ball) in dry and wet environments, respectively.
- The SDIC system successfully quantified the spatial distribution of traction forces at the interface between a marine mussel plaque and a substrate, demonstrating its capability to capture complex interfacial mechanical responses in bio‐adhesion events.
- A sensitivity analysis of substrate material parameters has been conducted, which suggests that both Young's modulus and Poisson's ratio have an impact on the SDIC measurement, with Poisson's ratio playing a more pronounced effect. These findings highlight the importance of implementing a robust calibration procedure to ensure the reliability and validity of SDIC measurements.
- While many previous SDIC studies have modelled substrates as linear elastic solids for computing traction forces, the present framework incorporates the substrate's hyperelastic behavior into the traction force calculations. Numerical evaluation showed that 1) traction forces obtained using the linear elastic model were lower than those computed with the Ogden hyperelastic model, and 2) the discrepancy was negligible for small substrate deformations but became more pronounced as deformation increased.
Experimental Section
4
The SDIC Measurement
In this study, an experimental platform was developed based on the in situ SDIC method, shown in Figure 13. A tension device consisting of a linear actuator (Thomson MLA11A05) and a load cell (Honeywell Model 34) was used to apply tension force on an object that was attached to the PDMS substrate. Meanwhile, two CCD cameras (DCC1545M‐GL, ThorLabs, Exeter, UK) with an angle φ (≈30°) were positioned at ≈ 21.5 mm distance relative to the substrate to capture the movement of particles. Both the CCD cameras operated at a frame rate of 25 fps with a resolution of 1280 × 1024 pixels. A side camera (Pixelink PL‐D753MU, Edmund Optics, York, UK) was also employed to monitor the deformation of the object in Z‐Y plane at the frame rate of 50 fps. The in situ SDIC system was mounted on a honeycomb optical breadboard (Newport Corporation, California, USA) to control the vibration induced measurement noise to less than 2 µm. A white light source was positioned 11.5 mm below the substrate to enhance the contrast between the particles and the surrounding black‐dyed PDMS.
The experimental platform employed in the current study.
During the SDIC measurement, the region of interest (ROI), as shown in Figure 14a, was centred in the imaging system to minimize edge aberrations caused by lens distortions. The ROI was divided into identical square subsets, and each subset was distinguishable due to its unique grey‐value distribution, which in an 8‐bit digital image is scaled from 0 (black) to 255 (white). Each subset contains a unique grey‐level distribution, which is essential for the DIC algorithm's tracking and calculation function. The algorithm locates the subset's new position in subsequent images to precisely measure displacement and strain fields across the specimen. Furthermore, the subsets could overlap or remain separate depending on two parameters: subset size (*L_s_ *) and subset interval (*L_i_ *). The subset size represents the dimension (in pixels) of a subset within the ROI, while the interval represents the distance between the central points of adjacent subsets.
*a) A representative image taken during SDIC measurement; b) Subsets distribution in the ROI; c) Schematic showing the definition of L
s
and L
i
.*
Using the DICe software, the 3D translations of each subset were tracked through stereo digital image correlation. The X‐Y‐Z coordinates of these subsets were detected, and deformation was determined by tracking the motions of all subsets, represented by their central points (Figure 14b). The subset size and interval, defined in pixels via DICe, affected measurement accuracy.^[^ 55 ^]^ *L_s_
- should be large enough to include enough speckles for accurate tracking, while *L_i_
- determines the resolution of the measurement, avoiding potentially missing localized deformation features. If *L_i_
- is smaller than *L_s_ *, it would result in overlapping subsets (Figure 14c). It is noted that the number of subsets along a length *L_k_
- (unit: pixels) was determined solely by *L_i_ *, i.e., *L_k_ */*L_i_ *.
A parameter study was conducted using DICe, selecting subset sizes (*L_s_
- = 15, 25, 35, 45 pixels) and intervals (*L_i_
- = 10, 15, 25, 35, 45 pixels) from the available options, to evaluate measurement deviations. The parameter study evaluated the deformation of a PDMS substrate under a 9 g steel ball to determine the optimal values of *L_s_
- and *L_i_ *. The results suggest that the deviation of measurement is the lowest when *L_s_
- and *L_i_
- are 45 and 10 pixels, respectively. The details are summarized in S.7 (Supporting Information). A larger subset size generally improves measurement precision by reducing displacement noise but at the cost of lower spatial resolution. Conversely, a smaller interval increases the density of measurement points and captures finer deformation features, though it also raises computational demands and may increase noise. For balanced performance, it is recommended to select subset sizes of at least 21 pixels to minimize noise, and use intervals smaller than half the subset size, ensuring sufficient overlap without excessive redundancy.^[^ 56 ^]^ *L_s_
- = 45 pixels and *L_i_
- = 10 pixels were used in DIC process in the following studies.
Tension on the Marine Mussel Plaque
Blue mussels (Mytilus edulis) were collected from the Hunstanton mussel farm (52.94°N, 0.49°E), England. The mussels were secured onto PDMS substrates in an aquarium system with recirculating seawater. Tensile tests were performed on mussel plaques deposited on the PDMS surface within one week of the plaques' deposition. During testing, the plaques remained submerged while their attached threads were pulled at a 15° angle using a linear actuator (MLA11A05, Thomson, Bideford, UK) operating at a quasi‐static speed of 0.1 mm/s. The applied load was recorded using a load cell (Honeywell Model 34) with a precision of 0.01 N throughout the tension period. It is noted the natural pulling angles of a mussel thread‐plaque system typically occur at ≈15°.
The tensile loading angle was set at 15° to simulate a physiological loading condition dominated by shear with a minor normal component, mimicking the hydrodynamic drag forces experienced by mussels in natural environments.^[^ 57 ^]^ This configuration is also consistent with recent mechanical studies emphasizing the importance of directional tension in determining the quasi‐static response and detachment mechanics of mussel plaques.^[^ 47 ^]^ Consequently, this angle was selected to provide a representative mixed‐mode loading scenario to validate the measurement framework.
Ethics Approval Statement
Marine mussel plaques were harvested from live mussels by gently cutting threads. All procedures involving live marine invertebrates were conducted in accordance with institutional and ethical guidelines for the care and use of marine organisms. No procedures involving vertebrate animals or human subjects were performed.
Conflict of Interest
The authors declare no conflict of interest.
Author Contributions
Y.H. and T.L. performed conceptualization: Y.H. performed data collection: Y.H. and T.L. performed formal analysis: T.L. performed funding acquisition: Y.H. and T.L. performed investigation: Y.H. and T.L. performed methodology: Y.H. and T.L. performed simulation: T.L. performed project administration: T.L. performed Supervision. Y.H. and T.L. performed validation: Y.H. performed visualization: Y.H. wrote—original draft: Y.H., F.W., and T.L. wrote—review and edited.
Supporting information
Supporting Information
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1N. Myshkin , A. Kovalev , Friction 2018, 6, 143.
- 2S. G. Croll , Prog. Org. Coat. 2020, 148, 105847.
- 3Y. Ikada , Biomaterials 1994, 15, 725.7986935 10.1016/0142-9612(94)90025-6 · doi ↗ · pubmed ↗
- 4S. Liu , Y. Wang , Scanning 2010, 32, 61.20695025 10.1002/sca.20173 · doi ↗ · pubmed ↗
- 5T. Ando , T. Uchihashi , N. Kodera , Annu. Rev. Biophys. 2013, 42, 393.23541159 10.1146/annurev-biophys-083012-130324 · doi ↗ · pubmed ↗
- 6J. W. Lichtman , J.‐A. Conchello , Nat. Methods 2005, 2, 910.16299476 10.1038/nmeth 817 · doi ↗ · pubmed ↗
- 7A. P. Demchenko , Methods Appl Fluoresc 2020, 8, 022001.32028269 10.1088/2050-6120/ab 7365 · doi ↗ · pubmed ↗
- 8V. Magidson , A. Khodjakov , Methods Cell Biol 2013, 114, 545.23931522 10.1016/B 978-0-12-407761-4.00023-3PMC 3843244 · doi ↗ · pubmed ↗